 2020-05-21
2020-05-21 1335
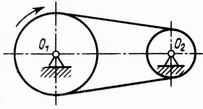
1335Данные механизмы применяют для передачи вращательного движения на большие расстояния с преобразованием параметров вращения. Передача движения осуществляется за счет сил трения. В качестве гибких звеньев применяют ремни, канаты, цепи, нити.
 |
Тема: Структурные элементы механизмов
Звенья механизмов
Звено - это одна или несколько деталей механизма, соединенных между собой неподвижно (жестко).
В каждом механизме имеется 2 группы звеньев.
1.Неподвижное звено - стойка. Стойка в механизме может быть только одна, так как все неподвижные звенья являются единым целым (например, корпус электродвигателя, станина станка) Условное обозначение (на рисунке звено 6).
2. Подвижные звенья.
Подвижные звенья подразделяются на ведущие и ведомые.
Ведущие звенья – это звенья, которым сообщается движение, преобразуемое механизмом в требуемые движения других звеньев. Входное звено соединено с двигателем либо с выходным звеном другого механизма. Обычно в механизме имеется одно входное и выходное звено
Ведомые звенья (выходные) - это звенья совершающее движение, для выполнения которого предназначен механизм. Выходное звено соединено с исполнительным устройством (рабочим органом, указателем прибора), либо со входным звеном другого механизма.
Ведущие и ведомые звенья являются подвижными.
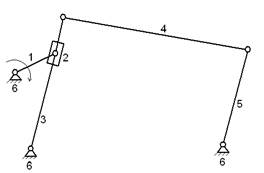
В рычажных механизмах имеются следующие подвижные звенья:
- кривошип (на рисунке звено 1), вращающееся звено рычажного механизма, которое может совершать полный оборот вокруг неподвижной оси;
- коромысло (на рисунке звено 5), вращающееся звено рычажного механизма, которое может совершать только неполный оборот вокруг неподвижной оси;
- ползун (на рисунке звено 2), совершает возвратно-поступательное движение и образующее поступательную пару со стойкой;
- камень – звено, совершающее поступательное движение относительно подвижной направляющей, называемой кулисой;
- кулиса (на рисунке звено 3), звено, которое совершает вращательное движение относительно стойки и на котором есть направляющая для ползуна;
- шатун (на рисунке звено 4) - звено, которое не имеет соединения со стойкой и образующее кинематические пары только с подвижными звеньями.
 |
Виды звеньев
 |
Для изображения механизмов и его составных частей – звеньев и кинематических пар – пользуются стандартными условными обозначениями. Условное изображение звеньев на кинематических схемах механизмов регламентируется ГОСТом. Примеры изображения некоторых звеньев приведены на рисунке. На кинематических схемах звенья обозначаются арабскими цифрами: 0, 1, 2 и т.д. (см. рис. 1.10).
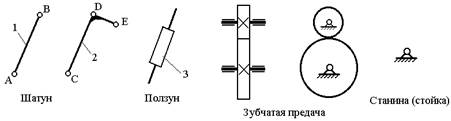 |
Таблица 1 – Условные обозначения пар и звеньев механизмов
| Условное обозначение | Названия изображения. Комментарий |
 | Стержень, рычаг, ось, вал, шатун и т.п. (звено). |
 | Звено в форме треугольника. Базисное звено. |
 | Поступательно движущееся звено: ползун или камень кулисы. |
 | Вращательная кинематическая пара. |
 | Соединение ведущего звена со стойкой вращательной парой А. |
 | Поступательно движущееся звено, состоящее из двух жестко соединенных деталей. |
 | Шарнирное соединение стержня с поступательно движущимся звеном. |
 | Ползун в направляющих: а и б – направляющие (неподвижные) охватывают ползун. Ползун охватывает направляющую – в. |
а)  б) б)  в) в)  | Камень кулисы: а и б – камень кулисы охватывает кулису; в – кулиса охватывает камень кулисы. |
 | Фрикционный механизм. |
 | Наличие окружности, выполненной штрих-пунктиром, обозначает, что на схеме представлен зубчатый механизм. |
 | Варианты обозначения зубчатых механизмов состоящих из двух цилиндрических колёс внешнего зацепления. |
Любой механизм машины состоит из нескольких звеньев, подвижно соединенных друг с другом.
Подвижное соединение двух звеньев допускающих, их относительное перемещение одного звена относительно другого, называется кинематической парой
 |  |  |
| поступательная | вращательная | цилиндрическая |
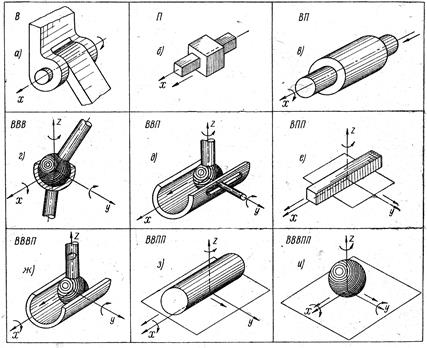
Виды кинематических пар приведены в таблице:
В – вращательная, П – поступательная, ВП – цилиндрическая; ВВВ – сферическая, ВВП – шар-цилиндр с прорезью, ВПП – плоскостная, ВВВП – шар-цилиндр, ВВПП – цилиндр-плоскость, ВВВПП – шар-плоскость. Здесь буква «В» обозначает возможное вращательное движение, «П» - возможное поступательное движение.
Таблица кинематических пар
Условное графическое обозначение кинематических пар
| Название | Конструктивное изображение | Условное изображение |
| Поступательная |  |  |
| Вращательная |  |   |
| Цилиндрическая |  |  |
| Сферическая с пальцем |  |  |
| Сферическая |  |  |
| Стрелочки на конструктивном изображении кинематических пар показывают, как двигаются эти пары | ||
В качестве примера последовательности изображения кинематической схемы берется двигатель внутреннего сгорания.
 |  |  |  |  |
Ведущим звеном является поршень, так как движение ему сообщают внешние силы (давление газа или пара). Поршень совершает возвратно-поступательные движения относительно стенок неподвижного цилиндра 2. Ведомое звено – вал с кривошипом 4 – совершает вращательное движение. Между ведущим и ведомым звеньями находится промежуточное – шатун 3, совершающий плоскопараллельное движение.
Поршень это ползун, стенки цилиндра направляющие, следовательно, эта кинематическая пара согласно стандартным условным изображениям изобразится, как показано на рисунке I. Вал с кривошипом, совершающий вращательное движение относительно неподвижной опоры, изобразиться, как показано на рисунке II. Шатун – это стержень, концы которого связаны: один с ползуном, другой с кривошипом (рисунок III). Связав все звенья воедино, получим схематическое изображение механизма.
Кинематические цепи
Кинематическая цепь - это система звеньев, соединённых с помощью кинематических пар.
Классификация кинематических цепей.
Незамкнутые - это такие кинематические цепи, которые имеют звенья, входящие только в одну кинематическую пару (рис.1).
Замкнутые - это кинематические цепи, в которых каждое звено входит не менее, чем в две кинематические пары (рис.1.1).
Простые - это кинематические цепи, в которых каждое звено входит не более, чем в две кинематические пары (рис.1, 1.1).
Сложные - это кинематические цепи, в которых имеется хотя бы одно звено, входящее более чем в две кинематические пары (рис.1.2).
Большинство используемых механизмов образованы замкнутыми кинематическими цепями.
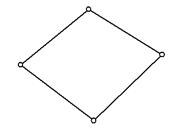
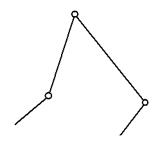
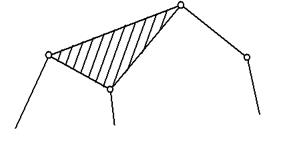
Рис.1 Рис.1.1 Рис.1.2








