 2020-06-29
2020-06-29 315
315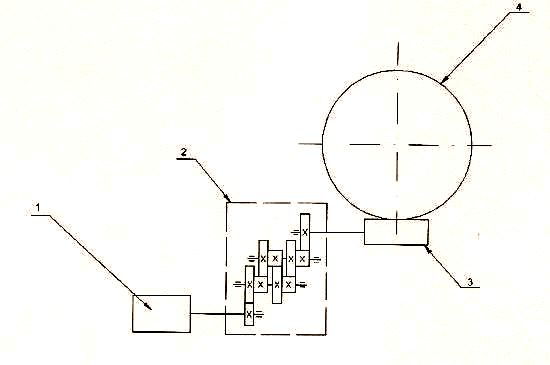
Рисунок 10. Кинематическая схема азимутального редуктора
1 — двигатель 2 — редуктор, 3 — червяк, 4 — передаточное колесо
Характеристики зубчатых колес редуктора и кинематических пар приведены в таблице 6.
Таблица 6
Характеристики зубчатых колес и кинематических пар редуктора
| № колеса | Z1 | Z2 | Z3 | Z4 | Z5 | Z6 | Z7 | Z8 | Z9 | Z10 | Z11 | Z12 |
| Число зубьев | 18 | 30 | 12 | 30 | 12 | 30 | 12 | 30 | 12 | 10 | 1* | 95 |
| Делительный модуль, мм | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 1 | 1 |
| Делительный диаметр | 9 | 15 | 6 | 15 | 6 | 15 | 6 | 15 | 6 | 20 | 95 | |
| Передаточное отношение | 0,6 | 0,4 | 0,4 | 0,4 | 0,3 | 0,0105 | ||||||
* - Z11 – число витков (заходов) червяка.
Общее передаточное отношение азимутального редуктора
 (31)
(31)

Угловой шаг двигателя 
Тогда с учетом передаточного отношения угловой шаг на выходе редуктора будет составлять

Т.е. разрешение такого азимутального электропривода почти на два порядка выше, чем максимально допустимая погрешность системы наведения и сопровождения.
Определим число импульсов, подаваемых на управляющие обмотки
шагового двигателя, для обеспечения азимутального вращения измерительной системы со скоростью 
Угловая скорость вала шагового двигателя должна составлять
 (32)
(32)
Частота вращения шагового двигателя (в об/с)
 (33)
(33)
Число шагов двигателя за 1 оборот составляет
 (34)
(34)
Тогда время, необходимое для поворота вала шагового двигателя на 1 шаг, выраженное в сек, будет равно
 (35)
(35)
Частота управляющих импульсов
 , (36)
, (36)
где  шаговый угол двигателя, выраженный в радианах (
шаговый угол двигателя, выраженный в радианах ( ).
).
Итак,  =19,12 Гц, что значительно ниже частоты приемистости электродвигателя.
=19,12 Гц, что значительно ниже частоты приемистости электродвигателя.
Вывод: азимутальный редуктор альт–азимутальной установки вместе с
выбранным шаговым двигателем подходит по всем условиям в качестве ази-
мутального электропривода следящей ИК-системы.
Редуктор угла места
На рисунке 11 приведена кинематическая схема редуктора угла места альт-азимутальной установки.
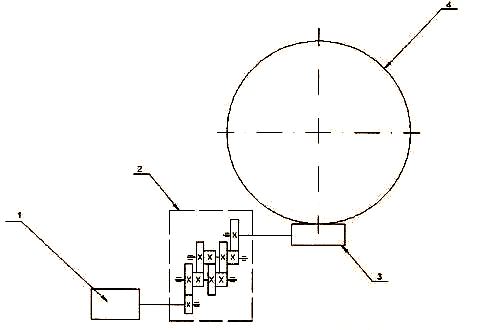
Рисунок 11. Редуктор угла места альт-азимутальной установки
1 — двигатель, 2 — редуктор, 3 — червяк, 4 — передаточное колесо
Характеристики зубчатых колес редуктора и кинематических пар приведены в таблице 7.
Таблица 7
Характеристики зубчатых колес и кинематических пар редуктора
| № колеса | Z1 | Z2 | Z3 | Z4 | Z5 | Z6 | Z7 | Z8 | Z9 | Z10 | Z11 | Z12 |
| Число зубьев | 18 | 30 | 12 | 30 | 12 | 30 | 12 | 30 | 12 | 10 | 1* | 57 |
| Делительный модуль, мм | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 1 | 1 |
| Делительный диаметр | 9 | 15 | 6 | 15 | 6 | 15 | 6 | 15 | 6 | 20 | 57 | |
| Передаточное отношение | 0,6 | 0,4 | 0,4 | 0,4 | 0,3 | 0,0175 | ||||||
* - Z11 – число витков (заходов) червяка.
Общее передаточное отношение азимутального редуктора

Тогда с учетом передаточного отношения угловой шаг на выходе редуктора будет составлять

Определим число импульсов, подаваемых на управляющие обмотки
шагового двигателя, для обеспечения вертикального вращения измерительной системы со скоростью  .
.

что также значительно ниже частоты приемистости электродвигателя.
Вывод: рассчитанный кинематический узел вполне подходит для про-
ектируемой следящей ИК-системы.








