 2020-06-29
2020-06-29 195
195МІНІСТЕРСТВО ОСВІТИ І НАУКИ, молоді та спорту УКРАЇНИ
Запорізький авіаційний коледж ім. О. Г. Івченка
Домашня самостійна робота
Кінематика
Розробив викладач ____________ (Гуляєва Т.В.)
Розглянуто та затверджено
На засіданні ПЦК
_ фізико-математичних дисциплін _
Протокол № ____ від _______________ 2012
Голова ПЦК ___________ (Костенко Л. І.)
2012
ВСТУП
Ці вказівки призначені для студентів коледжу з метою допомоги їм самостійно виконати контрольну роботу. Для цього приводиться коротка теоретична частина і наведені приклади розв’язку найбільш типових задач. Крім цього приведена програма теоретичного курсу та задачі для контрольних робіт.
Контрольну роботу потрібно виконувати на окремих штампах. Позначення «ДСР 01. код спеціальності. № за списком. 01». Умову задачі переписувати повністю. Розв’язок задачі супроводжувати вичерпним, але коротким текстовим поясненням. При необхідності потрібно робити малюнок. Розв’язок виконувати в загальному вигляді. Обов’язково перевірити розмірність та зробити необхідний числовий розрахунок. Розв’язок закінчується словом “Відповідь” після якого вона і записується.
Здається (і захищається) КР безпосередньо викладачу, який призначений для даних навчальних груп кафедрою. Захист КР відбувається в процесі індивідуальної співбесіди викладача зі студентом.
Необхідний варіант контрольної роботи студент вибирає за списком.
1. За даними вимірювання фізичної величини визначити середнє значення, випадкову, абсолютну та відносну похибки вимірювань.
| n | 1 | 2 | 3 | 4 | 5 | 6 |
| m, г | 100+№ вар | 100 + № вар + 0,01*№ вар | 100+№ вар – 0,15*№ вар | 100+№ вар + 0,05*№ вар | 100+№ вар – 0,07*№ вар | 100+№ вар + 0,2*№ вар |
Наприклад:
№ варіанту = 35, тоді
| n | 1 | 2 | 3 | 4 | 5 | 6 |
| m, г | 135 | 135,35 | 129,75 | 136,75 | 132,55 | 142 |
Заповнити наступну таблицю:
| m, г | Δmі, г | Δmі2, г2 | σm, г | Δm, г | ε, % | mсер  Δm, г Δm, г
|
| 135 | 0,23 | 0,0529 | 1,66 | 1,66 | 1,23 | 135,23 |
| 135,35 | – 0,12 | 0,0144 | ||||
| 129,75 | 5,48 | 30,0304 | ||||
| 136,75 | – 1,52 | 2,3104 | ||||
| 132,55 | 2,68 | 7,1824 | ||||
| 142 | – 6,77 | 45,8329 | ||||
| mсер = 135,23 |  83,113 83,113
|
1. Знайдемо середнє значення:

Отримане значення записувати с точністю до сотих.
2. Знайдемо випадкову похибку для кожного вимірювання та підведемо отримане значення у квадрат:
Δmі = mсер – mі
3. Знайдемо середню квадратичну похибку:
4. Розрахуємо абсолютну похибку вимірювань:
 , де Δmприл = 0,00325 г
, де Δmприл = 0,00325 г

5. Відносна похибка визначається так:

6. Остаточний результат записати у такому вигляді:

m = (135,23 1,66) г
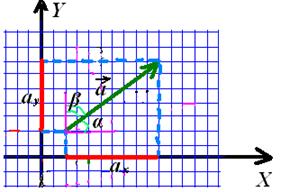
2. На рисунку 1 показано напрям векторів. Масштаб: 1 клітинка = 0,1*№ варіанту. За даними рисунка визначити:
а) координати та модулі всіх векторів;
б) довжину вектора  та кут між вектором та віссю ОХ;
та кут між вектором та віссю ОХ;
в) довжину вектора  та кут між вектором та віссю ОY;
та кут між вектором та віссю ОY;
г) скалярний добуток та кут між векторами  та
та  .
.
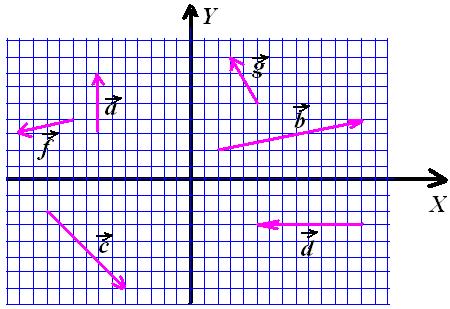
Рисунок 1
Наприклад:
№ варіанту = 35, тоді масштаб 1 клітинка = 3,5
1. Заповнюємо таблицю:
| Вектор | a | b | c | d | f | g | m | n |
| OX | 0 | 38,5 | 21 | – 28 | – 14 | – 7 | 14 | – 77 |
| OY | 14 | 7 | 17,5 | 0 | – 3,5 | 10,5 | – 24,5 | 17,5 |
| модуль* | 14 | 39 | 27 | 28 | 14 | 13 | 28 | 79 |
| Кут | 300 | 770 | ||||||
| Скалярний добуток та кут між векторами | – 0,68; 89,980 | |||||||
*Модуль векторів округлювати до одиниць.
| Кут між вектором та віссю ОХ:  Кут між вектором та віссю ОY:
Кут між вектором та віссю ОY:  Модуль вектора
Модуль вектора
 Проекція шуканого вектора на вісь визначається як алгебраїчна сума відповідних проекцій векторів.
Проекція шуканого вектора на вісь визначається як алгебраїчна сума відповідних проекцій векторів.
|
2. Скалярний добуток векторів та кут між ними визначається так:
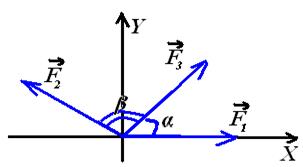
3. На рисунку 2 показано напрям векторів. За даними рисунка визначити модуль рівнодійної сил, що діють на тіло. Кути: α = 3*№ варіанту – 3, β = 1500 – α; 
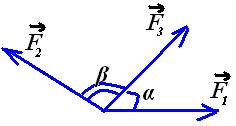 Рисунок 2
Рисунок 2
| 
|
Наприклад:
№ варіанту = 35, тоді α = 1029 β = 480, F1 = F0, F2 =43,75F0, F3 = 70F0
1. Заповнюємо таблицю:
| Вектор | F1 | F2 | F3 | F |
| OX | F0, | – 43,75F0*cos 300 | 70F0*cos 1020 | |
| OY | 0 | 43,75F0*sin 300 | 70F0*sin 1020 | |
| модуль* |
або
| Вектор | F1 | F2 | F3 | F |
| OX | F0, | – 37,89F0 | – 14,55F0 | – 52,44 F0 |
| OY | 0 | 21,88F0 | 68,47F0 | 90,35 F0 |
| модуль* | 104,47F0 |
4. Дано початкова координата, початкова швидкість та прискорення тіла. Скласти рівняння залежності координати від часу. Описати цей рух. Записати рівняння залежності переміщення, швидкості та прискорення від часу. Побудувати графіки залежності кінематичних величин від часу.
| х0, м | V0, м/с | а, м/с2 |
| № варіанту | 
| 
|
Наприклад:
№ варіанту = 35, тоді
| х0, м | V0, м/с | а, м/с2 |
| 35 | –7 | 1,75 |
1. Запишемо рівняння залежності координати від часу та опишемо цей рух.
х = 35 – 7t + 0,875t2
Тіло рухається рівноприскорено у бік, протилежний напряму осі Х.
2. Запишемо рівняння залежності переміщення, швидкості та прискорення від часу та побудуємо графіки залежності кінематичних величин від часу.
S = – 7t + 0,875t2
V = – 7 + 1,75t
а = 1,75

Таблиця варіантів
| Варіант | Номер задач | ||||||||
| 1 | 1.1 | 2.1 | 2.32 | 3.1 | 3.32 | 4.1 | 4.32 | 5.1 | 5.32 |
| 2 | 1.2 | 2.2 | 2.33 | 3.2 | 3.33 | 4.2 | 4.33 | 5.2 | 5.33 |
| 3 | 1.3 | 2.3 | 2.34 | 3.3 | 3.34 | 4.3 | 4.34 | 5.3 | 5.34 |
| 4 | 1.4 | 2.4 | 2.35 | 3.4 | 3.35 | 4.4 | 4.35 | 5.4 | 5.35 |
| 5 | 1.5 | 2.5 | 2.36 | 3.5 | 3.36 | 4.5 | 4.36 | 5.5 | 5.36 |
| 6 | 1.6 | 2.6 | 2.37 | 3.6 | 3.37 | 4.6 | 4.37 | 5.6 | 5.37 |
| 7 | 1.7 | 2.7 | 2.38 | 3.7 | 3.38 | 4.7 | 4.38 | 5.7 | 5.38 |
| 8 | 1.8 | 2.8 | 2.39 | 3.8 | 3.39 | 4.8 | 4.39 | 5.8 | 5.39 |
| 9 | 1.9 | 2.9 | 2.40 | 3.9 | 3.40 | 4.9 | 4.40 | 5.9 | 5.40 |
| 10 | 1.10 | 2.10 | 2.41 | 3.10 | 3.41 | 4.10 | 4.41 | 5.10 | 5.24 |
| 11 | 1.11 | 2.11 | 2.42 | 3.11 | 3.42 | 4.11 | 4.42 | 5.11 | 5.25 |
| 12 | 1.12 | 2.12 | 2.43 | 3.12 | 3.43 | 4.12 | 4.43 | 5.12 | 5.26 |
| 13 | 1.13 | 2.13 | 2.44 | 3.13 | 3.44 | 4.13 | 4.44 | 5.13 | 5.27 |
| 14 | 1.14 | 2.14 | 2.45 | 3.14 | 3.45 | 4.14 | 4.45 | 5.14 | 5.28 |
| 15 | 1.15 | 2.15 | 2.46 | 3.15 | 3.46 | 4.15 | 4.46 | 5.15 | 5.29 |
| 16 | 1.16 | 2.16 | 2.47 | 3.16 | 3.47 | 4.16 | 4.47 | 5.16 | 5.30 |
| 17 | 1.17 | 2.17 | 2.48 | 3.17 | 3.48 | 4.17 | 4.48 | 5.17 | 5.31 |
| 18 | 1.18 | 2.18 | 2.49 | 3.18 | 3.49 | 4.18 | 4.1 | 5.18 | 5.1 |
| 19 | 1.19 | 2.19 | 2.50 | 3.19 | 3.50 | 4.19 | 4.2 | 5.19 | 5.2 |
| 20 | 1.20 | 2.20 | 2.51 | 3.30 | 3.51 | 4.30 | 4.3 | 5.30 | 5.3 |
| 21 | 1.21 | 2.21 | 2.52 | 3.21 | 3.52 | 4.21 | 4.4 | 5.21 | 5.4 |
| 22 | 1.22 | 2.22 | 2.53 | 3.22 | 3.53 | 4.22 | 4.30 | 5.22 | 5.30 |
| 23 | 1.23 | 2.23 | 2.54 | 3.23 | 3.54 | 4.23 | 4.31 | 5.23 | 5.31 |
| 24 | 1.24 | 2.24 | 2.5 | 3.24 | 3.5 | 4.24 | 4.5 | 5.24 | 5.5 |
| 25 | 1.25 | 2.25 | 2.6 | 3.25 | 3.6 | 4.25 | 4.6 | 5.25 | 5.6 |
| 26 | 1.26 | 2.26 | 2.7 | 3.26 | 3.7 | 4.26 | 4.7 | 5.26 | 5.7 |
| 27 | 1.27 | 2.27 | 2.8 | 3.27 | 3.8 | 4.27 | 4.8 | 5.27 | 5.8 |
| 28 | 1.28 | 2.28 | 2.9 | 3.28 | 3.9 | 4.28 | 4.9 | 5.28 | 5.9 |
| 29 | 1.29 | 2.29 | 2.10 | 3.29 | 3.10 | 4.29 | 4.10 | 5.29 | 5.10 |
| 30 | 1.30 | 2.30 | 2.14 | 3.30 | 3.14 | 4.30 | 4.14 | 5.30 | 5.14 |
| 31 | 1.31 | 2.31 | 2.15 | 3.31 | 3.15 | 4.31 | 4.15 | 5.31 | 5.15 |








