 2020-06-29
2020-06-29 1330
1330Тема лекции: «Реостатные преобразователи»
Наиболее широко в автоматических системах применяются измерительные преобразователи (ИП) для того, чтобы преобразовать значения регулируемых параметров в эквивалентные значения, например, электрических сигналов.
Реостатными называются преобразователи, выполненные в виде реостата, движок которого перемещается под действием входной преобразуемой величины. Выходной величиной таких ИП является электрическое сопротивление, функционально связанное с положением движка. Реостатные преобразователи бывают проволочными и не проволочными. Проволочные отличаются высокой точностью и стабильностью функции преобразования и вместе с тем низкой разрешающей способностью (ступенчатая функция преобразования при переходе от витка к витку) и невысоким сопротивлением (до десятков кОм). Не проволочные преобразователи характеризуются большими значениями сопротивления и разрешающей способности, но в тоже время недостаточными точностью и стабильностью функции преобразования.
Реостатные преобразователи в зависимости от конструктивного исполнения делятся на преобразователи с вращательным и линейным перемещениями подвижного элемента.
В ряде случаев применяются реостатные преобразователи с нелинейным распределением сопротивления вдоль каркаса. Заданная функция преобразования Rx=F(x) обеспечивается либо изменением профиля каркаса, либо применением намотки с переменным шагом, либо шунтированием участков линейного реостата дополнительными резисторами (данный прием использован, в частности, при построении синусно-косинусного потенциометра).
Тема лекции: «Индуктивные и индукционные преобразователи»
Индуктивный преобразователь
Принцип действия индуктивного преобразователя основан на изменении индуктивности обмотки электромагнитного дросселя в зависимости от перемещения одной из подвижных частей: якоря, сердечника и других. Простейшим индуктивным преобразователем является катушка с изменяющимся воздушным зазором, его работа основана на изменении магнитного сопротивления магнитопровода путём изменения длины воздушного зазора.
Достоинства: простота и надёжность.
Недостатки: малая чувствительность, зависимость индуктивного сопротивления от частоты тока.
Индуктивные преобразователи являются преобразователями параметрического типа. Для преобразования механического перемещения в электрический сигнал здесь используется изменение индуктивности дросселей с переменным воздушным зазором.
Индукционный преобразователь
Индукционными называются преобразователи, в которых скорость изменения измеряемой механической величины преобразуется в индуктированную ЭДС. Индуктированная ЭДС определяется скоростью изменения магнитного потока Ф, сцепленного с катушкой из W витков:
Следовательно, индукционные преобразователи возможно применять для измерения линейных и угловых перемещений.
Существует две группы индукционных преобразователей:
- с неизменным сопротивлением на пути постоянного магнитного потока. В преобразователях подобного типа ЭДС в катушке наводится благодаря линейным (рис. 1,а) или угловым (рис. 1,б) перемещениям катушки;
- с сопротивлением на пути постоянного магнитного потока, которое изменяется под действием преобразователей измеряемой величины.
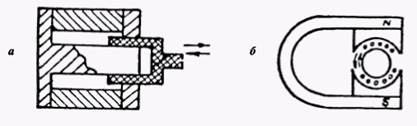
Рис. 1. Принцип устройства индукционных преобразователей:
а — с подвижной катушкой, совершающей линейное перемещение;
б — с подвижной катушкой, совершающей угловое перемещение.
Схема устройства такого преобразователя изображена на рис. 2.
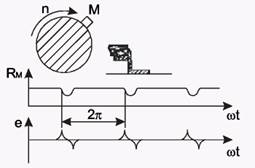
Рис. 2. Принцип действия простейшего датчика тахометра с индукционным преобразователем
На валу укреплен стальной зуб М. При вращении вала этот зуб проходит мимо зазора неподвижно установленной магнитной системы с постоянным магнитом, уменьшая сопротивление зазора так, как показано на кривой RМ. При этом в катушке, надетой на магнит, наводятся импульсы ЭДС, форма которых показана на кривой е. Частота импульсов, выраженная в герцах, всегда будет в точности равна скорости вращения вала, выраженной в числе оборотов в секунду.
Наиболее широкое распространение получили преобразователи первой группы в приборах для измерения: скорости вращения (тахометры), ускорения, расходов жидкостей и параметров вибрации.

