 2020-06-30
2020-06-30 227
227В данном разделе выполнен расчёт автоматической системы регулирования плотности слива классификатора КСН-24.
3.1 Идентификация спирального классификатора КСН-24 как объекта управления по каналу регулирования плотности слива
Расчёт ведётся при внешнем ступенчатом возмущающем воздействии амплитудой ΔXвх = 0,5 мА.
Экспериментальные данные приведены в таблице 7.
Таблица 7 – Ординаты экспериментальной кривой разгона при ΔXвх = 0,5 мА
| t, с | Δρ, 
|
| 0 | 0 |
| 7,5 | 0 |
| 15 | 0,005 |
| 30 | 0,04 |
| 45 | 0,075 |
| 60 | 0,096 |
| 75 | 0,11 |
| 90 | 0,122 |
| 105 | 0,123 |
| 120 | 0,1232 |
График возмущающего воздействия X(t) и кривая разгона объекта – плотность слива классификатора ∆H(t), представлены на рисунке 7.
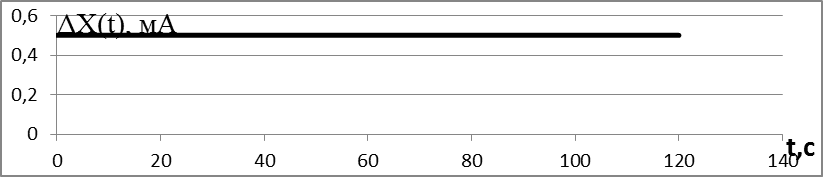
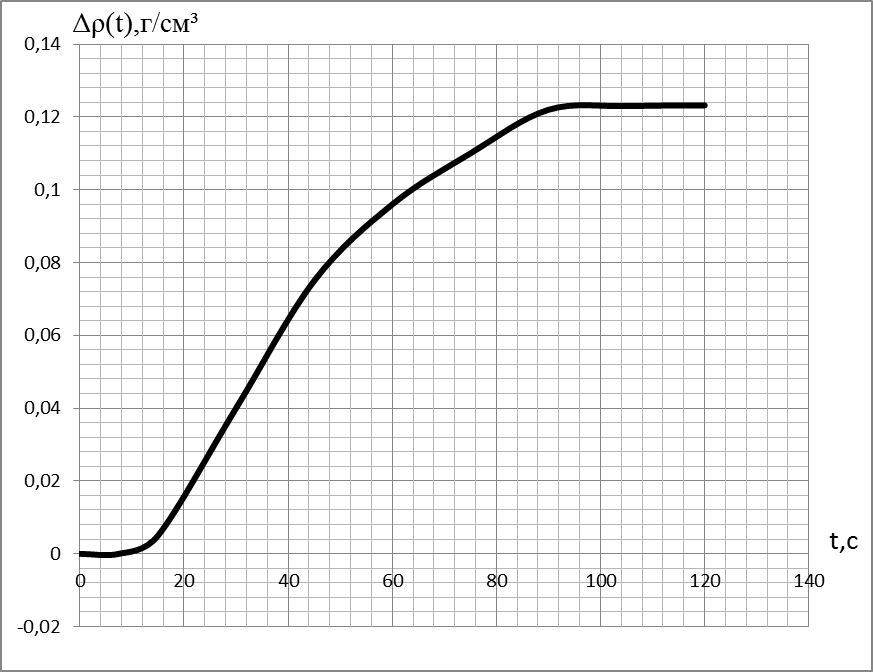
Рисунок 7 – Возмущающее воздействие и экспериментальная
кривая разгона объекта
Единичная Dρ0(t) и нормированная DρН(t) переходные функции определяются по следующим формулам:
Dρ0(t) = Dρ(t) / A, (3.1)
DρН(t) = Dρ0(t) / Dρ0(Tу), (3.2)
где A – скачкообразное возмущающее воздействие, при котором снята переходная характеристика (А = 0,5 мА);
Tу – время переходного процесса;
Dρ0(Tу) – установившееся значение переходной характеристики (Dρ0(Tу) =0,2464  .
.
Результаты расчётов единичной и нормированной переходных функций сведены в таблицу 8.
Таблица 8 – Ординаты единичной и нормированной переходных функций
| t, с | Δρ0, 
| ΔρН |
| 0 | 0 | 0 |
| 7,5 | 0 | 0 |
| 15 | 0,01 | 0,04058 |
| 30 | 0,08 | 0,32467 |
| 45 | 0,15 | 0,6088 |
| 60 | 0,192 | 0,7792 |
| 75 | 0,22 | 0,8929 |
| 90 | 0,244 | 0,9906 |
| 105 | 0,246 | 0,9984 |
| 120 | 0,2464 | 1 |
На рисунке 8 приведена единичная переходная характеристика, а на рисунке 9 – нормированная переходная характеристика.
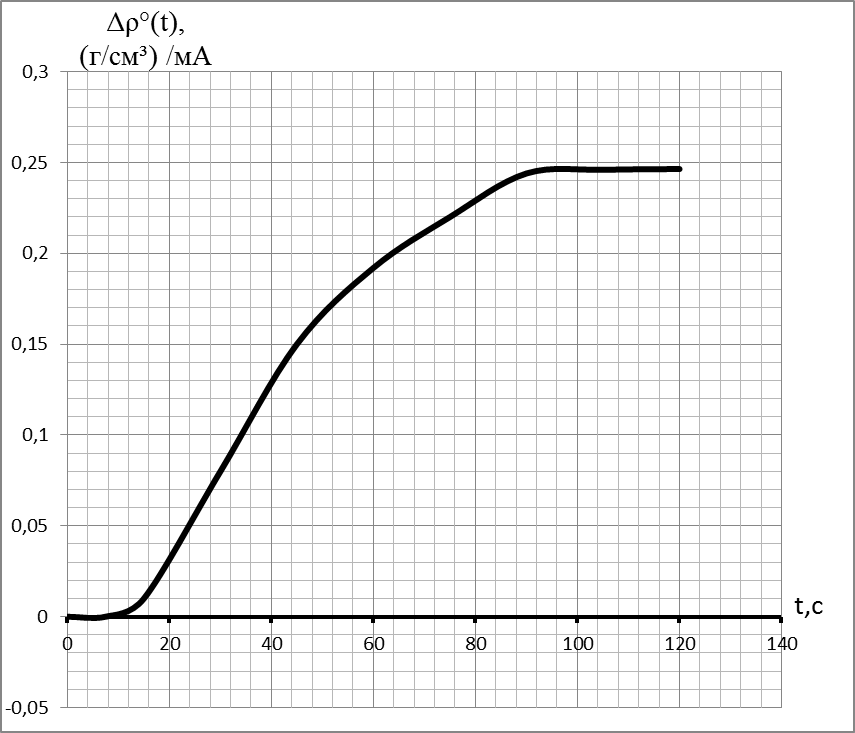
Рисунок 8 – Единичная переходная характеристика
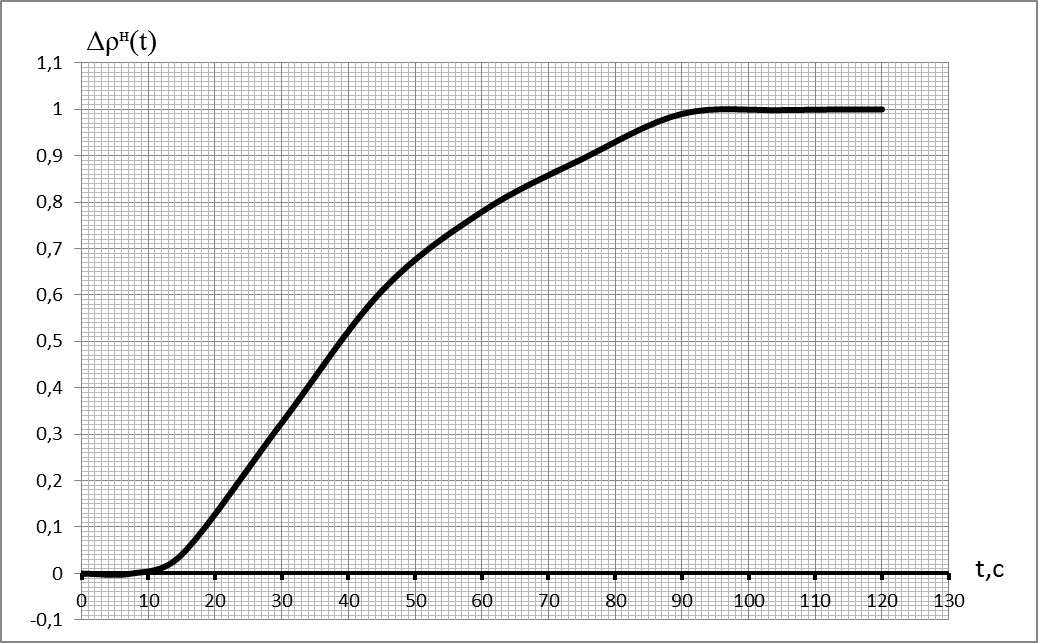
Рисунок 9 – Нормированная переходная характеристика
Из зависимости Dρ0(t) находится величина коэффициента усиления объекта Kоб:
Kоб = Dρ0(Tу) =0,2464 . (3.3)
Определим динамические характеристики объекта при аппроксимации его последовательным соединением апериодического звена и звена запаздывания.
Транспортное запаздывание объекта определяется как отрезок времени (0; t), на котором выполняется неравенство:
0 £ Dρн(t) £ D,
где D = (0,01..0,02) Dρн(tу).
Тогда по графику на рисунке 9 определяем t = 11,5 с;
Дополнительное запаздывание tд находится по формуле:
 =
=  , (3.4)
, (3.4)
где  = (0,1÷0,15)
= (0,1÷0,15)  и
и  = (0,7÷0,8) ;
= (0,7÷0,8) ;
 и
и  ;
;
(tБ, ) и (tА, ) – точки пересечения аппроксимированной и экспериментальной кривых разгона.
По графику на рисунке 9 определяем значения tА = 20 с при = 0,125 и
tБ = 60 с при = 0,78.
Таким образом, дополнительное запаздывание будет:
=  = 4,631 с.
= 4,631 с.
Найдем общее запаздывание объекта по формуле:
tоб = t + tд; (3.5)
tоб=4,631 + 11,5 = 16,13 с.
Постоянная времени объекта определяется из следующего выражения:
 =
=  ; (3.6)
; (3.6)
 = 28,97 с.
= 28,97 с.
Аппроксимирующая передаточная функция определяется по формуле:
W(p) =  . (3.7)
. (3.7)
Таким образом, аппроксимирующая передаточная функция имеет вид:
W(p)=  .
.
Для определения точности аппроксимации экспериментальной переходной функции решением дифференциального уравнения первого порядка с запаздывающим аргументом рассчитываются ординаты аппроксимирующей кривой:
 =
=  (3.8)
(3.8)
Для определения среднеквадратической ошибки аппроксимации вычисляется отношение dAn
 =
=  (3.9)
(3.9)
Результаты расчётов сведены в таблицу 9.
Таблица 9 – Ординаты переходных функций
| t, с | 
| 
| dАп×104 |
| 0 | 0 | 0 | 0 |
| 7,5 | 0 | 0 | 0 |
| 15 | 0,04058 | 0 | 16,4709479 |
| 30 | 0,32467 | 0,380425162 | 31,0804433 |
| 45 | 0,6088 | 0,630810571 | 4,85952795 |
| 60 | 0,7792 | 0,780009087 | 0,00621428 |
| 75 | 0,8929 | 0,868912818 | 5,73330707 |
| 90 | 0,9906 | 0,921888368 | 46,746446 |
| 105 | 0,9984 | 0,953455197 | 20,1793457 |
| 120 | 1 | 0,972265095 | 7,69224963 |
На рисунке 10 изображён график переходной характеристики при аппроксимации решением дифференциального уравнения первого порядка вместе с нормированной переходной характеристикой.
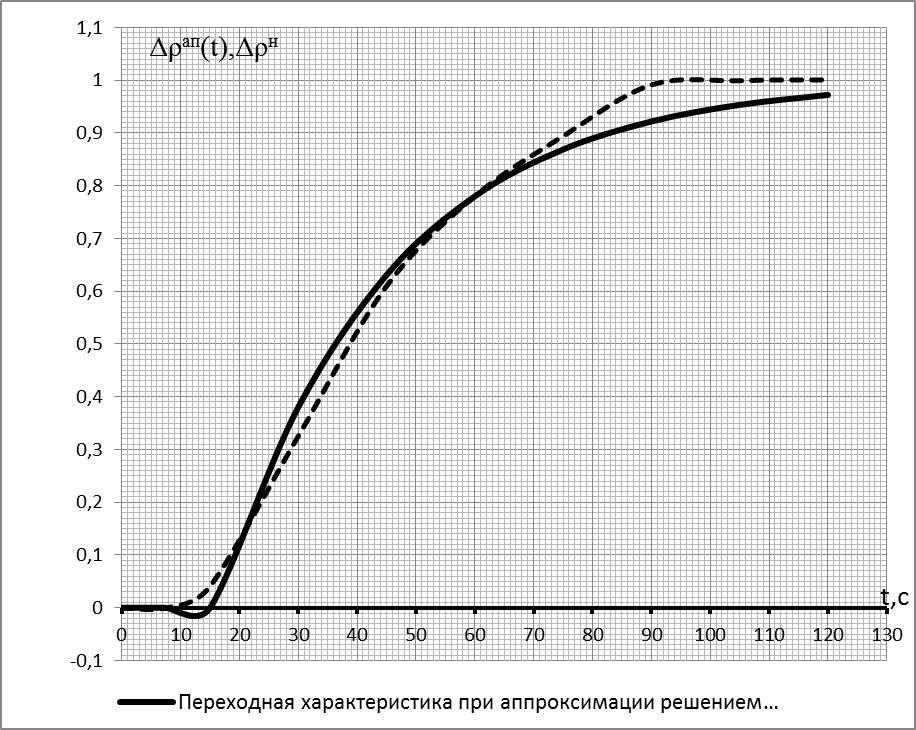
Рисунок 10 – Переходная характеристика при аппроксимации решением дифференциального уравнения и нормированная переходная характеристика
По данным таблицы 5 рассчитывается среднеквадратичная ошибка аппроксимации d по формуле (3.10):
d = 100 
 ; (3.10)
; (3.10)
δ= 3,64 %.
Так как ошибка аппроксимации превышает 3%, необходимо осуществить аппроксимацию объекта последовательным соединением двух апериодических звеньев и звена запаздывания (решением дифференциального уравнения второго порядка с запаздывающим аргументом).
Передаточная функция будет иметь вид:
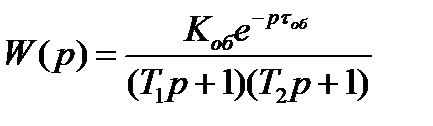 , (3.11)
, (3.11)
где Kоб и tоб были найдены ранее.
Аппроксимация такой передаточной может быть выполнена по графикам, представленным на рисунке 11, на которых приведены зависимости T 1* = T 1 / t 7 и T 2*= T 2 / t 7 от t 17* = t 1 / t 7.
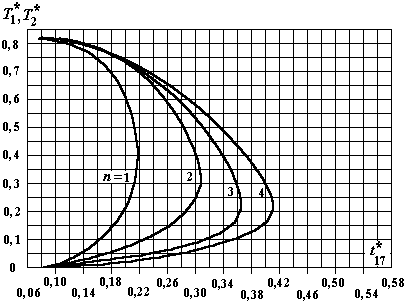
Рисунок 11 - Зависимости относительных значений постоянных времени передаточной функции от относительного времени t17*
По кривой разгона на рисунке 9 находим времена t1 и t7, при которых ординаты переходной функции составляют 0,1 и 0,7 установившегося значения соответственно:
t1 = 7,5 c и t7 = 40,5 c.
Вычисляем относительное время t17 = t1 / t7 = 7,5/40,5 = 0,185.
По графику на рисунке 11 определяем относительные значения постоянных времени:
 с и
с и  с.
с.
Определяем действительные значения постоянных времени:
 с и
с и  с.
с.
Передаточная функция будет иметь вид:
 .
.
Для определения точности аппроксимации рассчитываются ординаты аппроксимирующей кривой:


Результаты расчётов сведены в таблицу 10.
Таблица 10 – Ординаты переходных функций
| t, с |
|
| dАп×104 |
| 0 | 0 | 0 | 0 |
| 7,5 | 0 | 0 | 0 |
| 15 | 0,04058 | 0 | 16,4709 |
| 30 | 0,32467 | 0,3538 | 8,4950 |
| 45 | 0,6088 | 0,6176 | 0,7824 |
| 60 | 0,7792 | 0,7775 | 0,0294 |
| 75 | 0,8929 | 0,8709 | 4,82968 |
| 90 | 0,9906 | 0,9251 | 42,4578 |
| 105 | 0,9984 | 0,9565 | 17,4908 |
| 120 | 1 | 0,97480 | 6,3504 |
На рисунке 12 изображён график переходной характеристики при аппроксимации решением дифференциального уравнения второго порядка вместе с нормированной переходной характеристикой.
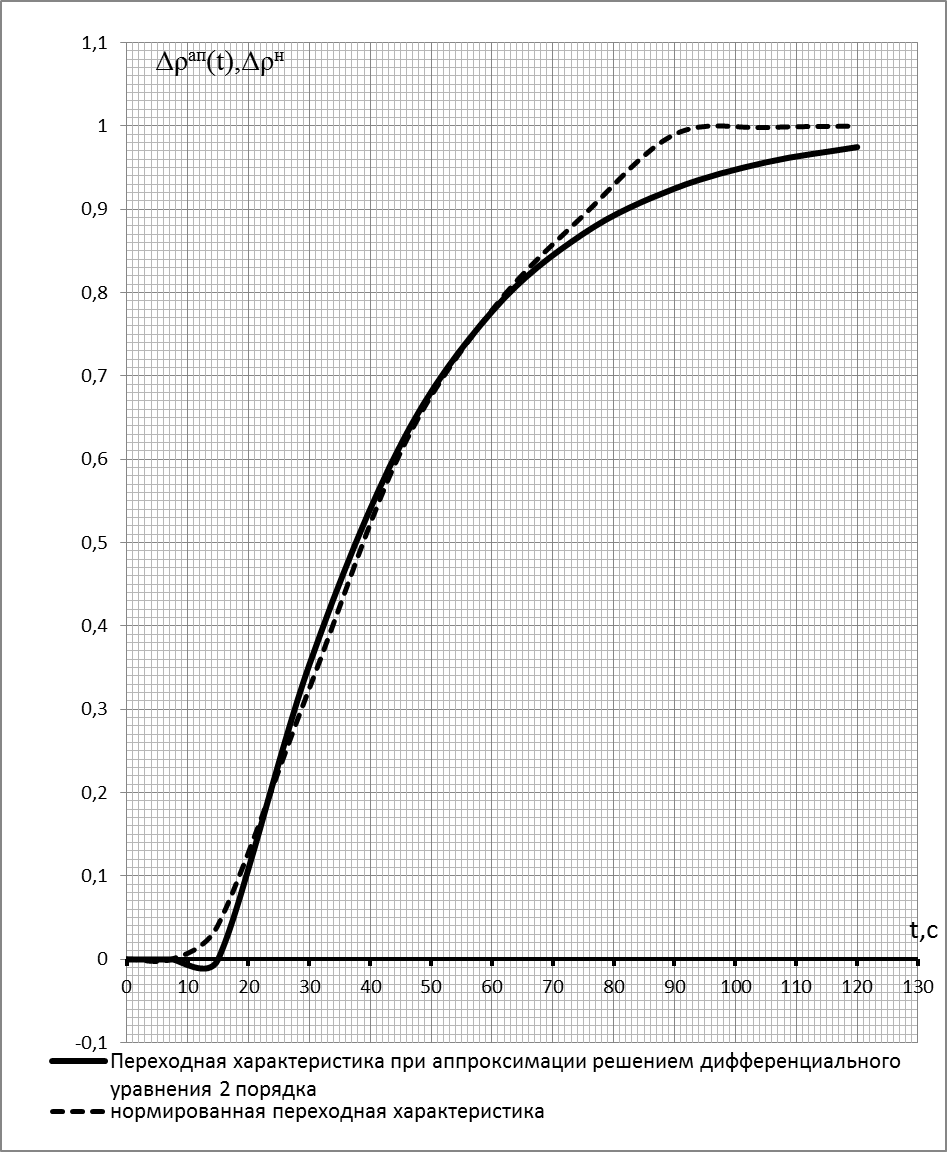
Рисунок 12 – Переходная характеристика при аппроксимации решением дифференциального уравнения второго порядка и нормированная переходная характеристика
По данным таблицы 6 рассчитывается среднеквадратичная ошибка аппроксимации d по формуле:
d = 100  ;
;
δ= 0,74 %.
Погрешность аппроксимации удовлетворительная (d < 3%), поэтому окончательно принимаем аппроксимацию объекта дифференциальным уравнением второго порядка.
3.2 Выбор закона регулирования АСР плотности слива спирального классификатора
Показатели качества регулирования, определяемые технологическим процессом:
- ΔXвх.макс. = 1,5 мА;
- время регулирования tр ≤ 95 с;
- динамическое отклонение Δρ1 = 0,13  ;
;
- статическая ошибка Δρcт. = 0 ;
- требуемый характер переходного процесса – с минимумом интегрального квадратичного критерия.
Для выбора закона регулирования (типа регулятора) воспользуемся аппроксимацией объекта решением дифференциального уравнения первого порядка с запаздывающим аргументом.
Исходными данными для определения настроек регулятора являются:
- параметры объекта управления – Kоб = 0,2464 , Tоб = 28,97 с, τоб = 16,13 с;
- требования к качеству переходного процесса в АСР, приведенные выше.
Тип регулятора ориентировочно выбирается по отношению τоб/Tоб по таблице 2.1 [2].
τоб/Tоб = 16,13/28,97 = 0,557 < 1,
следовательно, выбираем непрерывный регулятор.
Для получения требуемого качества переходного процесса (в пределах допустимых значений Dρ1, tр и ρcт) необходимо выбрать закон управления, для этого рассчитаем динамический коэффициент регулирования:
Rд =  =
=  = 0,352. (3.12)
= 0,352. (3.12)
По графику 2.3 [2] для переходного процесса с минимумом интегрального квадратичного критерия выбирается простейший закон управления, обеспечивающий значение Rд ниже расчетного. Для Rд = 0,352 и τоб/Tоб = 0,557 только ПИД-закон регулирования обеспечивает такое значение.
Далее необходимо провести проверку, обеспечит ли выбранный регулятор допустимое время регулирования, по графику на рисунке 2.4 [2]. Для ПИД-закона регулирования  , откуда время регулирования
, откуда время регулирования  , что меньше допустимого времени регулирования tр = 95 c.
, что меньше допустимого времени регулирования tр = 95 c.
Выбранный закон управления гарантирует отсутствие статической ошибки, т.е.  = 0.
= 0.
Таким образом, окончательно выбираем ПИД-закон регулирования.
3.3 Определение настроек регулятора АСР плотности слива спирального классификатора
Расчёт настроек регулятора может выполняться следующими способами:
- графо-аналитическим на основе амплитудно-фазовой характеристики объекта и М-критерия (показателя колебательности);
- по расширенным амплитудно-фазовым характеристикам;
- по приближенным формулам;
- с помощью математического моделирования.
На практике настройки регуляторов определяют обычно по приближённым формулам (таблица 2.2 [2]), а затем производят их уточнение.
Настройки ПИД-регулятора по приближённым формулам для процесса с минимумом интегрального квадратичного критерия имеют следующие значения:
 = 1,4
= 1,4  = 1,4
= 1,4  = 10,2
= 10,2  , (3.13)
, (3.13)
 = 1,3
= 1,3  = 1,3 16,13 = 20,97 с, (3.14)
= 1,3 16,13 = 20,97 с, (3.14)
 = 0,5 = 0,5
= 0,5 = 0,5  16,13 = 8,065 с. (3.15)
16,13 = 8,065 с. (3.15)
Уточнение настроек регулятора произведём в среде MATLAB с помощью встроенного пакета Simulink. Модель автоматической системы регулирования в Simulink представлена на рисунке 13.
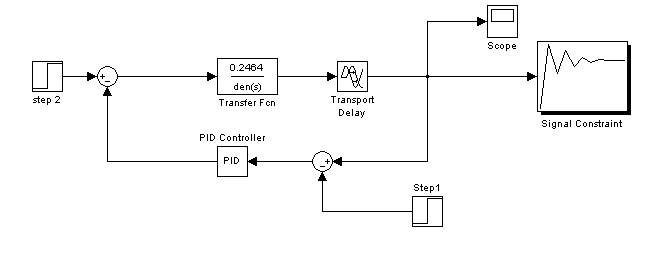
Рисунок 13 – Модель одноконтурной системы автоматического регулирования
для оптимизации настроек ПИД-регулятора
Для задания настроек встроенного в Simulink ПИД-регулятора необходимо перевести значения времени интегрирования и времени предварения в значения коэффициентов интегральной и дифференциальной составляющих ПИД-закона регулирования:
- коэффициент пропорциональной составляющей Kп = Kр = 10,2  ;
;
- коэффициент интегральной составляющей Kи = Kр/Tи = 0,478  ;
;
- коэффициент дифференциальной составляющей Kд = Kр∙Tд = 82,263  .
.
При задании в командной строке MATLAB значений коэффициентов составляющих закона регулирования:
>> Kp=10.2;Ki=0.478;Kd=82.263
и моделировании в Simulink получается переходной процесс, изображённый на рисунке 14.
| t, с |

|
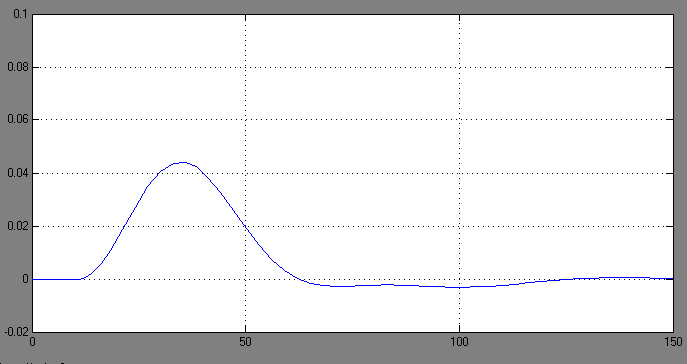
Рисунок 14 – Переходной процесс при внешнем ступенчатом воздействии 0,5 мА
при исходных настройках регулятора  ,
, 
Для оптимизации настроек регулятора необходимо в блоке Signal Constraint задать ограничения на вид переходного процесса(рисунок 15), указать параметры Kp, Ki и Kd в качестве настраиваемых. После этого можно запустить процесс оптимизации.
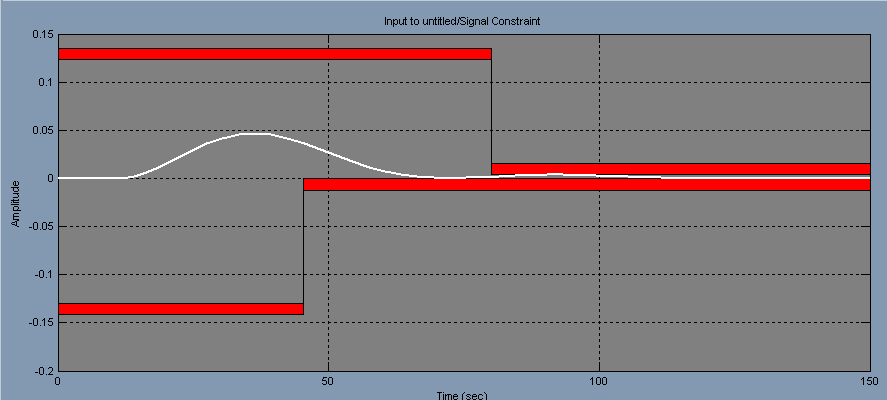
Рисунок 15 – Оптимизация параметров регулятора в блоке Signal Constraint
пакета Simulink Response Optimization
В результате получается переходный процесс, изображённый на рисунке 16.
|
|
| t, с |
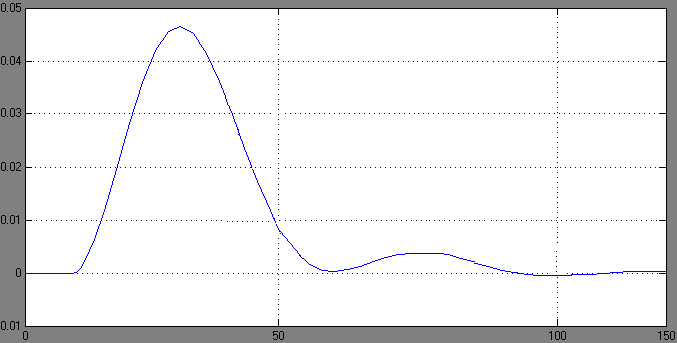
Рисунок 16 – Переходной процесс при внешнем ступенчатом воздействии 0,5 мА при оптимальных настройках регулятора  ,
, 
Для получения значений настроек регулятора в командной строке MATLAB вводится команда:
>>Кp,Ki,Kd.
В результате в рабочее окно будут выведены оптимизированные значения настроек регулятора:
Ki = 0.3454;
Kd = 59.3922;
Kp =10.2858.
В результате оптимизации были получены следующие настройки ПИД-регулятора:
- коэффициент усиления регулятора  ;
;
- время изодрома  ;
;
- время предварения Tд = Kd/Kp = 5,818 с.
3.4 Проверка АСР плотности слива спирального классификатора на устойчивость
После определения настроек регулятора необходимо исследовать устойчивость АСР, а также определить запас устойчивости системы по модулю и по фазе, используя частотный критерий Найквиста. Для этого сначала рассчитывается амплитудно-фазовая характеристика (АФХ) объекта. Ее получают подстановкой р = j w в передаточную функцию разомкнутой системы.
Построим АФХ разомкнутой системы, используя возможности ПП Mathcad.
Расчет в ПП Mathcad представлен ниже.
| Pраз(w) |
| ∆γ=45˚ |
Годограф Найквиста не охватывает точку (-1; j w) на комплексной плоскости, поэтому система в замкнутом состоянии устойчива и имеет значительный запас устойчивости по амплитуде Δа = 0,452 и по фазе Δγ = 44 °.
3.5 Построение переходного процесса в АСР плотности слива спирального классификатора
Необходимо проверить правильность расчета и оптимизации настроек регулятора. Изменим настройки на 20 % в большую сторону (Kр = 12,343 , Ки = 0,4145  , Кд = 71,268
, Кд = 71,268  ) и в меньшую сторону (Kр =8,2286 , Ки = 0,2832 , Кд = 47,5138 ), и получим графики переходных процессов с измененными параметрами (рисунок 18).
) и в меньшую сторону (Kр =8,2286 , Ки = 0,2832 , Кд = 47,5138 ), и получим графики переходных процессов с измененными параметрами (рисунок 18).
1 – переходной процесс с оптимальными настройками регулятора, 2 – процесс с увеличенными настройками, 3 – процесс с уменьшенными настройками
Рисунок 18 - Проверка настроек регулятора на оптимальность
Определим параметры переходного процесса при оптимальных настройках:
- максимальное динамическое отклонение
 , ,
| (3.16) |
Δ ρ 1= 0,046·0.5 = 0,023  ;
;
- перерегулирование  ;
;
- статическая ошибка D G ст = 0;
- время регулирования t р = 95 с.
Из графиков на рисунке 18 видно, что при уменьшении настроек регулятора увеличивается динамическое отклонение и время регулирования, при увеличении – уменьшается динамическое отклонение, время регулирования и перерегулирование увеличиваются. Отсюда делаем вывод, что при изменении параметров регулятора качество процесса регулирования ухудшается, но при этом система остается устойчивой, следовательно, найденные параметры регулятора оптимальны.
3.6 Проверка АСР плотности слива спирального классификатора на грубость
Зачастую параметры объекта управления изменяются во времени либо определены с ошибкой. В этих условиях необходимо проверять рассчитанную систему на нечувствительность (грубость, робастность) к возможным вариациям параметров системы для наихудших условий – увеличение коэффициента передачи К об и запаздывания τоб объекта управления. Для этого оценивают возможные отклонения параметров объекта регулирования и проверяют систему регулирования с новыми параметрами на устойчивость путем построения переходного процесса. Переходные процессы с оптимальными настройками регулятора и с исходными параметрами объекта, с увеличенным К об на 15 % и увеличенным τоб на 15 % приведены на рисунке 19.
Рисунок 19– Переходные процессы с оптимальными настройками регулятора
для проверки системы на грубость:
1– при исходных параметрах объекта (К об = 0,2464 , τоб = 11,5 с),
2 – при увеличенном на 15% K об (K об = 0,2834  ),
),
3 – при увеличенном на 15% τоб (τоб = 13,23)
Из рисунка 19 видно, что при изменении коэффициента усиления и времени запаздывания качество процесса регулирования ухудшается, однако система остается устойчивой и, следовательно, является робастной (грубой) к изменениям параметров объекта.
Таким образом, в данном разделе проекта выполнен расчет АСР плотности слива спирального классификатора, выполнена аппроксимация объекта дифференциальным уравнением второго порядка с запаздывающим аргументом. На основании расчетов выбран ПИД-регулятор непрерывного действия, определены оптимальные настройки регулятора ( ,
,  , Tд = 5,818 с.) и выполнена проверка настроек на оптимальность. Разработанная АСР исследована на устойчивость и робастность. Анализ устойчивости показал, что система обладает достаточным запасом по амплитуде и фазе (Δа = 0,452 и по фазе Δγ = 44 º), проверка на грубость доказала робастность системы к изменениям параметров объекта.
, Tд = 5,818 с.) и выполнена проверка настроек на оптимальность. Разработанная АСР исследована на устойчивость и робастность. Анализ устойчивости показал, что система обладает достаточным запасом по амплитуде и фазе (Δа = 0,452 и по фазе Δγ = 44 º), проверка на грубость доказала робастность системы к изменениям параметров объекта.
Заключение
В данном курсовом проекте рассмотрена автоматизация процесса измельчения и классификации золотосодержащей руды в условиях ООО «Соврудник».
Анализ технологии измельчения и классификации золотосодержащей руды позволяет сделать вывод о необходимости внедрения в данный процесс автоматизации с целью осуществления контроля и регулирования ряда параметров, что в свою очередь позволит добиться повышения безопасности данного производства и снизить его издержки.
В разделе «Автоматизация» сделан анализ процесса измельчения и классификации сульфидной золотосодержащей руды как объекта автоматизации, разработана трехуровневая структура АСУ ТП. Нижний уровень технических средств включает в себя приборы и аппаратуру контроля и регулирования. К среднему уровню относится АРМ оператора, реализующее функции контроля состояния основного оборудования, выбора режима управления, обработки сигналов, вывода информации о состоянии технологических объектов на экран монитора, накопления и передачи данных. В качестве микропроцессорного контроллера выбран Simatic S7-300. Микропроцессорный контроллер Simatic S7-300 объединен с центральной рабочей станцией в единую локальную вычислительную сеть и после начальной загрузки функционирует автономно, но может передавать и принимать информацию с верхнего уровня. Также в разделе выявлены основные контролируемые и регулируемые параметры. Сделан выбор и обоснование средств автоматизации данного процесса.
В специальной части курсового проекта произведен расчет АСР плотности слива спирального классификатора, в результате которого найдена передаточная функция объекта, выбран промышленный ПИД-регулятор непрерывного действия и найдены его оптимальные настройки (, , Tд = 5,818 с). Разработанная АСР исследована на устойчивость и робастность. Анализ устойчивости показал, что система обладает достаточным запасом по амплитуде и фазе (Δа = 0,452 и по фазе Δγ = 44 º), проверка на грубость доказала робастность системы к изменениям параметров объекта.








