 2020-08-05
2020-08-05 216
216Асинхронные электродвигатели нашли наибольшее распространение среди электродвигателей. Причиной этого является простота конструкции, надежность и дешевизна этих электродвигателей относительно других.
Существует два типа асинхронных электродвигателей:
1. Асинхронные двигатели с короткозамкнутым ротором (АД с КЗР). Другое название этих электродвигателей – асинхронные двигатели с «беличьим колесом». Это более простой тип АД, чем указанный ниже.
2. Асинхронные двигатели с фазным ротором (АД с ФР). Другое название этих электродвигателей – асинхронные двигатели с контактными кольцами. Имея большую стоимость и сложность конструкции, по сравнению с АД с КЗР, данный тип двигателя имеет и некоторые преимущества, более подробно которые будут рассмотрены ниже.
Асинхронный двигатель называется «асинхронным», то есть несинхронным, из-за того, что скорость вращения поля статора  и скорость вращения ротора
и скорость вращения ротора  не равны. Разница этих скоростей характеризуется скольжением
не равны. Разница этих скоростей характеризуется скольжением  :
:
 (2.1)
(2.1)
Таким образом, скольжение показывает разницу скорости поля и скорости ротора в долях скорости поля. Например, если номинальное скольжение АД составляет 0,04, то это означает, что при номинальной нагрузке скорость ротора на 4 % меньше скорости поля.
Механическая характеристика АД может быть построена в нескольких вариантах. Первым вариантом является построение, когда по оси X откладывается скольжение, а по оси Y – момент двигателя, как показано на рисунке 2.1а. При другом варианте построения механической характеристики по оси X откладывается момент двигателя, а по оси Y – угловая скорость двигателя  , как показано на рисунке 2.1б. Иногда при втором варианте по оси Yоткладывается скольжение, но в обратном порядке, то есть возрастание скольжения происходит вниз по оси X (смотри рисунок 2.1б).
, как показано на рисунке 2.1б. Иногда при втором варианте по оси Yоткладывается скольжение, но в обратном порядке, то есть возрастание скольжения происходит вниз по оси X (смотри рисунок 2.1б).
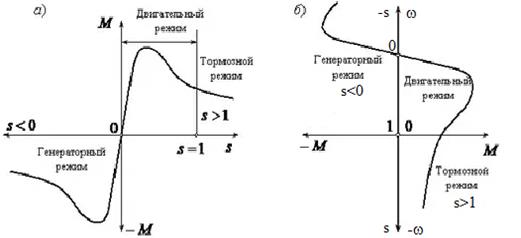
Рисунок 2.1. Механические характеристики асинхронного двигателя: а) – в координатах «s-M», б) – в координатах «М-w».
Естественными характеристиками АД (механической и электромеханической) называются характеристики АД при выполнении следующих условий:
1.  .
.
2.  .
.
3.  (только для АД с ФР).
(только для АД с ФР).
Первые два условия выполнятся автоматически, если АД напрямую запитан от электрической сети, на которую рассчитан. Третье условие является обязательным только для АД с ФР, потому что для АД с КЗР оно выполняется автоматически, так как обмотка ротора такого АД не выводится наружу и подключить к ней внешнее добавочное сопротивление  невозможно. При нарушении указанных условий характеристики АД называются искусственными и используются для регулирования скорости АД.
невозможно. При нарушении указанных условий характеристики АД называются искусственными и используются для регулирования скорости АД.
Рассмотрим подробнее естественную механическую характеристику АД, выполненную в координатах «М-w», с указанными на ней характерными точками, приведенную на рисунке 2.2а. Точкой 1 показана точка идеального холостого хода (ИХХ), когда двигатель развивает нулевой момент, то есть нагрузка двигателя полностью отсутствует. Реальный холостой ход несколько отличается от ИХХ, так как даже не нагруженный рабочим органом АД должен развивать небольшой момент на преодоление трения (трение в подшипниках и трение ротора о воздух) и самовентиляцию (если он выполнен с самовентиляцией). Точкой 2 обозначен режим номинальной нагрузки.
Длительно АД может работать с нагрузкой от нуля до момента номинального М Н, то есть на участке 1-2. При этом токи статора и ротора АД не превышают номинальные величины, и двигатель не перегревается. Точкой 3 обозначена точка критического момента, то есть максимального момента М К, который может развить АД. Если нагрузка превысит величину М К, то двигатель остановится. На участке 2-3, то есть с превышением нагрузки номинальной величины М Н, АД может работать только кратковременно, так как при этом токи ротора и статора превышают номинальные величины, и если не снизить нагрузку до номинальной величины М Н АД выйдет из строя вследствие перегрева. Точкой 4 показана точка, при которой скорость ротора равно нулю, то есть точка, с которой происходит пуск АД. Двигатель при этом развивает пусковой момент М п.

Рисунок 2.2. Естественные характеристики асинхронного двигателя: а) механическая, б) электромеханическая.
На рисунке 2.2, б) приведена естественная электромеханическая характеристика АД, представляющая собой взаимосвязь между током статора I 1 и угловой скоростью w. Иногда электромеханическую характеристику АД выполняют как взаимосвязь между током ротора I 2. Как видно из приведенной электромеханической характеристики, пусковой ток статора (а также и ротора) в 5-8 раз превышает номинальный ток. Поэтому пуск двигателя подключением «напрямую» на питающую электрическую сеть является достаточно тяжелым режимом АД, при котором он интенсивно греется.
Рассмотрим возможные способы регулирования скорости АД.
Регулирование скорости АД с ФР и путем добавления  в цепь ротора называется реостатным регулированием. Дополнительные возможности управлять скоростью асинхронного электродвигателя появляются, если ротор выполнен не короткозамкнутым, а фазным, т.е. если его обмотка состоит из катушек, похожих на статорные, соединенных между собой и выведенных на кольца, по которым скользят щетки, связанные с внешними устройствами. Схематически трехфазная машина с фазным ротором показана на рисунке 2.3, а. Фазный ротор обеспечивает дополнительный канал, по которому можно воздействовать на двигатель, - в этом его очевидное достоинство, но очевидна и плата за него: существенное усложнение конструкции, бoльшая стоимость, наличие скользящих контактов. Именно эти негативные особенности привели к тому, что в общем объёме производства асинхронные двигатели с фазным ротором составляют небольшую долю.
в цепь ротора называется реостатным регулированием. Дополнительные возможности управлять скоростью асинхронного электродвигателя появляются, если ротор выполнен не короткозамкнутым, а фазным, т.е. если его обмотка состоит из катушек, похожих на статорные, соединенных между собой и выведенных на кольца, по которым скользят щетки, связанные с внешними устройствами. Схематически трехфазная машина с фазным ротором показана на рисунке 2.3, а. Фазный ротор обеспечивает дополнительный канал, по которому можно воздействовать на двигатель, - в этом его очевидное достоинство, но очевидна и плата за него: существенное усложнение конструкции, бoльшая стоимость, наличие скользящих контактов. Именно эти негативные особенности привели к тому, что в общем объёме производства асинхронные двигатели с фазным ротором составляют небольшую долю.

а) б) в) г)
Рисунок 2.3. Асинхронный двигатель с фазным ротором (а), схема (б) и характеристики (в) и (г) реостатного регулирования.
Как и в электроприводе постоянного тока это простейший способ регулирования: в каждую фазу ротора включают одинаковые резисторы с сопротивлением Rд - рисунок 2.3,б. Преимущества и недостатки реостатного регулирования скорости асинхронных двигателей с фазным ротором практически те же, что у электропривода постоянного тока.
Преимуществом данного способа регулирования является простота и невысокие капитальные затраты (на дополнительный резистор и коммутационную аппаратуру).
Недостатки также очевидны:
1.Невысокий диапазон регулирования (2-3) и однозонность регулирования – скорость можно только снизить.
2. Снижается жесткость механической характеристики и, как следствие, снижается стабильность угловой скорости.
3. Появляются дополнительные электрические потери мощности в добавочном резисторе 
Частотное регулирование скорости АД. Двигатели с короткозамкнутым ротором - самые распространенные электрические машины - до в прошлом использовались лишь в нерегулируемом электроприводе поскольку практически единственная возможность эффективно регулировать скорость - изменять частоту напряжения, приложенного к статорным обмоткам, была технически трудно реализуема. Сейчас, благодаря успехам электроники, появились доступные преобразователи частоты (ПЧ) и частотно-регулируемый электропривод, приведённый на рисунке 2.4,а стал основным типом регулируемого электропривода.



а) б) в)
Рисунок 2.4. Схема частотно-регулируемого электропривода (а), механические характеристики (б), зависимость напряжения от частоты (в)
Скорость ИХХ w0 пропорциональна частоте f1 и не зависит от каких-либо других величин. При уменьшении f1 следует изменять напряжение на статорной обмотке U1 так, чтобы
 (2.1)
(2.1)
Как видно из рисунка 2.4. б) при таком регулировании скорости уменьшением частоты f1 момент критический М К не изменяется, как показано на рисунке 2.4,б сплошной линией. На самом деле, если строго выполнять уравнение (2.1) при регулировании скорости уменьшением частоты f1 будет происходить уменьшение критического момента М К, как показано на рисунке 2.4,б пунктирной линией. Особенно заметно это уменьшение критического момента М К будет происходить у машин малой мощности (единицы кВт). Для компенсации этого влияния обычно несколько увеличивают напряжение при низких частотах - пунктир на рисунке 2.4,в.
При увеличении частоты f1 выше номинальной f1 Н величина напряжения на обмотке статора поддерживается номинальной U1=U1н (так как напряжение на обмотке нельзя увеличивать выше номинального, иначе произойдёт пробой изоляции обмотки). При этом критический момент М К будет уменьшаться, как показано на рисунке 2.4,б.
Достоинства данного способа регулирования:
- Регулирование двухзонное - вниз (
 ) и вверх (U1=U1н, f1>f1н) от основной скорости
) и вверх (U1=U1н, f1>f1н) от основной скорости - Широкий диапазон регулирования (10 – в разомкнутых системах; 1000 – в замкнутых системах), регулирование плавное.
- Жесткость характеристик высокая, поэтому стабильность ω высокая.
- Допустимый момент нагрузки не изменяется по сравнению с естественной характеристикой
 при уменьшении скорости и Р = Рн при регулировании вверх.
при уменьшении скорости и Р = Рн при регулировании вверх. - Коэффициент полезного действия (КПД) электропривода практически не изменяется, поскольку не используются дополнительные резисторы в цепи статора, а КПД самого преобразователя частоты ПЧ высок (0.97-0.98). То есть способ экономичен в эксплуатации - нет дополнительных элементов, рассеивающих энергию. Несомненное достоинство - гибкость управления скоростью в замкнутых структурах.
Недостатком данного способа регулирования является достаточно высокая стоимость ПЧ и необходимость использования специальных типов АД, адаптированных для работы в составе частотно-регулируемого электропривода.
Регулирование скорости АД изменением величины напряжения на обмотке статора U1 без изменения частоты f1 (параметрическое регулирование), схема включения в замкнутом режиме и механические характеристики которого показаны на рисунке 2.5. В качестве источника питания для АД в данном случае используется регулируемый источник переменного напряжения – преобразователь напряжения ПН.
а) б)
Рисунок 2.5. Схема (а) и механические характеристики (б) асинхронного электропривода с параметрическим регулированием
Критический момент при таком регулировании будет снижаться пропорционально U12, критическое скольжение в соответствии останется неизменным - сплошные линии на рисунке 2.5,б. В замкнутой по скорости структуре - пунктир на рисунке 2.5,а - можно получить характеристики, показанные на рисунке 2.5,б пунктиром, т.е. способ внешне выглядит весьма привлекательно.
Достоинства данного способа регулирования:
1. Диапазон регулирования в замкнутой структуре (3-4):1; стабильность скорости удовлетворительная.
2. Плавность высокая.
Основным недостатком данного способа регулирования является то, что допустимая нагрузка резко снижается с уменьшением скорости. Если же не уменьшить нагрузку двигателя, то произойдёт перегрев ротора, что приведёт к тому, что воздушный зазор между ротором и статором исчезнет и двигатель «заклинит». Таким образом, рассмотренный способ регулирования очевидно неэффективен для использования в продолжительном режиме. Даже для самой благоприятной нагрузке - вентиляторной - необходимо двух-трехкратное завышение установленной мощности двигателя с повышенным скольжением, интенсивный внешний обдув.
Способ регулирования скорости изменением напряжения может в ряде случаев использоваться для кратковременного снижения скорости, а система ПН-АД очень полезна и эффективна для снижения пусковых токов. Такие ПН, используемые для снижения пусковых токов АД называются устройствами плавного пуска (УПП) или «софт-стартерами».
Кроме изложенных способов регулирования скорости АД для этой цели иногда используются специальные АД с КЗР с переключением обмоток статора, изменяющим число пар полюсов, то есть ступенчато регулирующие  . Такие двигатели называются многоскоростными, но они тяжелы, дороги, привод требует дополнительной переключающей аппаратуры и в связи с этим проигрывает современному частотно-регулируемому электроприводу.
. Такие двигатели называются многоскоростными, но они тяжелы, дороги, привод требует дополнительной переключающей аппаратуры и в связи с этим проигрывает современному частотно-регулируемому электроприводу.
Задание.
а) Для асинхронного двигателя с фазным ротором с заданными величинами номинальной мощности P Н, номинальной скорости вращения n н, кратностью критического момента l = М К/ М Н и активного сопротивления ротора R 2:
1) Построить естественные механическую и электромеханическую характеристики;
2) Построить реостатные механическую и электромеханическую характеристики при дополнительном сопротивлении в цепи ротора  .
.
Исходные данные для каждого варианта приведены в табл.2.1.
б) Для асинхронного двигателя с короткозамкнутым ротором с  В,
В,  Гц и с заданными величинами номинальной мощности P Н, номинальной скорости вращения
Гц и с заданными величинами номинальной мощности P Н, номинальной скорости вращения  , кратностью критического момента
, кратностью критического момента  :
:
1) Построить естественную механическую характеристику;
2) Построить искусственную механическую характеристику при частотном регулировании так, чтобы она проходила через точку с заданными значениями координат ( и sти = k 3);
и sти = k 3);
3) Определить частоту  и величину питающего напряжения
и величину питающего напряжения  , которое должны быть на статоре при этом. Исходные данные для каждого варианта приведены в табл.2.1.
, которое должны быть на статоре при этом. Исходные данные для каждого варианта приведены в табл.2.1.
Таблица 2.1
| Вариант | P н, кВт |  , об/мин , об/мин
| R 2, Ом | 
| k 1 | k 2 | k 3 |
| 1 | 120 | 579 | 0.02 | 2,7 | 0,9 | 0,3 | 0,5 |
| 2 | 40 | 725 | 0.07 | 2,8 | 1,1 | 0,4 | 0,6 |
| 3 | 140 | 584 | 0.02 | 2,5 | 1,1 | 0,5 | 0,7 |
| 4 | 100 | 584 | 0.02 | 2,8 | 0,9 | 0,6 | 0,3 |
| 5 | 120 | 584 | 0.02 | 2,5 | 1,1 | 0,7 | 0,4 |
| 6 | 18 | 955 | 0.2 | 2,7 | 0,8 | 0,3 | 0,5 |
| 7 | 80 | 735 | 0.04 | 2,8 | 0,8 | 0,4 | 0,6 |
| 8 | 170 | 577 | 0.02 | 2,6 | 0,8 | 0,5 | 0,7 |
| 9 | 50 | 720 | 0.05 | 2,9 | 0,62 | 0,6 | 0,3 |
| 10 | 60 | 725 | 0.03 | 2,9 | 0,6 | 0,7 | 0,4 |
| 11 | 110 | 567 | 0.03 | 2,8 | 1,1 | 0,3 | 0,5 |
| 12 | 8 | 940 | 0.31 | 2,5 | 0,5 | 0,4 | 0,6 |
| 13 | 40 | 720 | 0.04 | 2,9 | 0,6 | 0,5 | 0,7 |
| 14 | 65 | 725 | 0.03 | 2,9 | 0,6 | 0,6 | 0,3 |
| 15 | 105 | 567 | 0.03 | 2,8 | 1,1 | 0,7 | 0,4 |
| 16 | 12 | 940 | 0.3 | 2,5 | 0,6 | 0,3 | 0,5 |
| 17 | 20 | 1400 | 0,09 | 2,3 | 0,9 | 0,4 | 0,6 |
| 18 | 7 | 1400 | 0,18 | 2,8 | 0,66 | 0,5 | 0,7 |
| 19 | 70 | 725 | 0,03 | 2,9 | 0,8 | 0,6 | 0,3 |
| 20 | 160 | 587 | 0,02 | 2,8 | 0,6 | 0,7 | 0,4 |
| 21 | 50 | 725 | 0,06 | 2,9 | 0,62 | 0,3 | 0,5 |
| 22 | 30 | 720 | 0,08 | 2,8 | 0,65 | 0,4 | 0,6 |
Продолжение таблицы 2.1
| 23 | 135 | 577 | 0,02 | 2,8 | 0,62 | 0,5 | 0,7 |
| 24 | 3,5 | 910 | 0,77 | 2,3 | 0,8 | 0,6 | 0,3 |
| 25 | 185 | 577 | 0,02 | 2,6 | 0,84 | 0,7 | 0,4 |
| 26 | 5 | 940 | 0,24 | 2,5 | 0,5 | 0,3 | 0,5 |
| 27 | 18 | 955 | 0,28 | 2,3 | 0,7 | 0,4 | 0,6 |
| 28 | 125 | 568 | 0,03 | 2,9 | 1,2 | 0,5 | 0,7 |
| 29 | 35 | 940 | 0,05 | 2,5 | 0,8 | 0,6 | 0,3 |
| 30 | 16 | 955 | 0.1 | 2,7 | 0,62 | 0,7 | 0,4 |
| 31 | 20 | 579 | 0,09 | 2,8 | 0,9 | 0,3 | 0,5 |
| 32 | 7 | 730 | 0,18 | 2,5 | 0,66 | 0,4 | 0,6 |
| 33 | 70 | 584 | 0,03 | 2,8 | 0,8 | 0,5 | 0,7 |
| 34 | 160 | 584 | 0,02 | 2,5 | 0,6 | 0,6 | 0,3 |
| 35 | 50 | 584 | 0,06 | 2,7 | 0,62 | 0,7 | 0,4 |
| 36 | 30 | 955 | 0,08 | 2,8 | 0,65 | 0,3 | 0,5 |
| 37 | 135 | 735 | 0,02 | 2,6 | 0,62 | 0,4 | 0,6 |
| 38 | 3,5 | 577 | 0,77 | 2,9 | 0,8 | 0,5 | 0,7 |
| 39 | 185 | 720 | 0,02 | 2,9 | 0,84 | 0,6 | 0,3 |
| 40 | 5 | 725 | 0,24 | 2,8 | 0,5 | 0,7 | 0,4 |
| 41 | 10 | 567 | 0,18 | 2,5 | 0,7 | 0,3 | 0,5 |
| 42 | 125 | 940 | 0,03 | 2,9 | 1,2 | 0,4 | 0,6 |
| 43 | 35 | 720 | 0,05 | 2,9 | 0,8 | 0,5 | 0,7 |
| 44 | 16 | 725 | 0.1 | 2,8 | 0,62 | 0,6 | 0,3 |
| 45 | 120 | 567 | 0.02 | 2,5 | 0,9 | 0,7 | 0,4 |
| 46 | 40 | 940 | 0.07 | 2,8 | 1,1 | 0,3 | 0,5 |
| 47 | 140 | 1400 | 0.02 | 2,3 | 1,1 | 0,4 | 0,6 |
| 48 | 100 | 1400 | 0.02 | 2,8 | 0,9 | 0,5 | 0,7 |
| 49 | 120 | 725 | 0.02 | 2,9 | 1,1 | 0,6 | 0,3 |
| 50 | 18 | 587 | 0.2 | 2,8 | 0,8 | 0,7 | 0,4 |
| 51 | 80 | 725 | 0.04 | 2,9 | 0,8 | 0,3 | 0,5 |
| 52 | 170 | 720 | 0.02 | 2,8 | 0,8 | 0,4 | 0,6 |
| 53 | 50 | 577 | 0.05 | 2,8 | 0,62 | 0,5 | 0,7 |
| 54 | 60 | 910 | 0.03 | 2,3 | 0,6 | 0,6 | 0,3 |
| 55 | 110 | 577 | 0.03 | 2,6 | 1,1 | 0,7 | 0,4 |
| 56 | 8 | 940 | 0.31 | 2,5 | 0,5 | 0,3 | 0,5 |
| 57 | 40 | 945 | 0.04 | 2,3 | 0,6 | 0,4 | 0,6 |
Продолжение таблицы 2.1
| 58 | 65 | 568 | 0.03 | 2,9 | 0,6 | 0,5 | 0,7 |
| 59 | 105 | 940 | 0.03 | 2,5 | 1,1 | 0,6 | 0,3 |
| 60 | 12 | 955 | 0.3 | 2,7 | 0,6 | 0,7 | 0,4 |








