 2020-08-05
2020-08-05 176
176
В соответствии с выполняемыми функциями все элементы, составляющие автоматические системы, классифицируются на три самостоятельные группы:
- измерительная представляющая собой различного типа датчики, информирующие о достижении определенного значения контролируемого параметра;
- преобразовательная, служащая для усиления информационного сигнала и преобразования его в другой, удобный для управления;
- исполнительная, включающая в себя комплекс механизмов, непосредственно осуществляющих управление.
Все элементы любой группы имеют вход и выход. На вход поступает информация, форма которой преобразуется в другую, необходимую для дальнейшего движения и воздействия. Входная величина элемента обозначается через X, а выходная — через Y.
Элементы, как и системы, могут работать в различных режимах.
Режим работы элемента (системы) при постоянных во времени входной и выходной величинах называют установившимся или статическим режимом. В установившемся режиме X(t) = const и Y(t) =const.
Режим работы элемента при переменных во времени входной и выходной (или одной из них) величин называют динамическими.
Функциональная зависимость выходной величины Y от входной X, выраженная математически или графически, называется статической характеристикой элемента Y = f(X).
Элементы, имеющие не зависящие от времени параметры и линейные статические характеристики, называются линейными, а имеющие нелинейные характеристики — нелинейными элементами. По статической характеристике можно определить вид элемента (датчик, реле). Так, например, если статическая характеристика элемента непрерывна, т. е. величина Y находится в определенной непрерывной зависимости от величины X, то такой элемент называют источником первичной информации или датчиком. В соответствии с рисунком 20 приведены примеры характеристик.
Рисунок 20
Если статическая характеристика элемента изменяется скачком, т. е. практически осуществляется включение или отключение при достижении входной величиной X определенных, заранее установленных значений, то такой элемент называется реле. В соответствии с рисунком 21 приведен пример характеристики.
Рисунок 21
Коэффициент передачи элемента представляет собой отношение выходной величины элемента Y к входной величине X, т. е. К = Y/X.
Порог чувствительности — это наименьшее (по абсолютному значению) значение входного сигнала, способное вызвать изменение выходного сигнала.
Погрешность элемента появляется из-за неточной тарировки или градуировки (вследствие разброса параметров) элементов в процессе их изготовления (в пределах установленных допусков)
Различают абсолютную, относительную и приведенную погрешности.
Под абсолютной погрешностью элемента понимают разность между полученным YП и действительным Y значениями выходной величины, т. е.  = YП -Y.
= YП -Y.
Относительная погрешность дает более полное представление о нестабильности статической характеристики. Она представляет собой отношение абсолютной погрешности к действительному значению выходной величины элемента, выраженной в относительных единицах или процентах:
 0 =
0 =  /Y или 0 = ( /Y) 100%,
/Y или 0 = ( /Y) 100%,
где — абсолютная погрешность; Y — действительное значение выходной величины элемента.
Приведенная погрешность чаще всего характеризует элементы автоматики. Под приведенной погрешностью понимают отношение абсолютной погрешности к разности предельных значений выходной величины, выраженной в относительных единицах или процентах, т. е.
d =  , или d = 100%,
, или d = 100%,
где Yмакс и Yмин — максимальное и минимальное значения выходной величины элемента;  — абсолютная погрешность.
— абсолютная погрешность.
Погрешность, которая возникает при нормальных условиях эксплуатации, называется основной погрешностью.
Для элементов, составляющих системы автоматики, основным режимом работы является режим, при котором входная и выходная величины не остаются постоянными. Такой режим называется динамическим.
Процесс перехода элемента из одного установившегося состояния в другое называют переходным процессом.
Переходный процесс характеризуется переходной характеристикой. Под переходной характеристикой понимают зависимость выходной величины от времени Y = f(t) при скачкообразном изменении входной величины. Реакция большинства элементов на скачкообразный входной сигнал в соответствии с рисунком 22, т. е. их переходная характеристика, представляет собой нарастающую экспоненту в соответствии с рисунком 23.
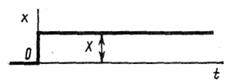
Рисунок 22
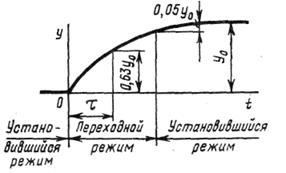
Рисунок 23
Время от начала экспоненциального изменения выходной величины до момента, когда она достигает 63% (2/з) установившегося значения выходной величины, называется постоянной времени элемента t. Чем меньше t, тем круче будет переходная характеристика, тем меньше длительность переходного процесса и тем меньше инерционность элемента.
Различные элементы автоматики имеют различные графики переходных процессов. В соответствии с рисунками 24 и 25показаны переходный процесс без запаздывания и переходный процесс элементов, обладающих инерцией соответсвенно. Степень инерционности подобных элементов оценивается постоянной времени t. Это время определяется расстоянием по оси абсцисс от начала координат до точки пересечения а касательной к кривой переходного процесса в начале координат с установившимся значением выходного сигнала Yуст.
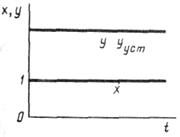
Рисунок 24
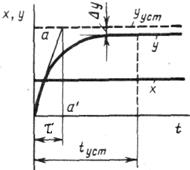
Рисунок 25
В соответствии с рисунком 26показан колебательно-затухающий переходный процесс, при котором выходная величина колеблется около ее установившегося значения Yуст с постоянной частотой fo = 1/  , где — период колебаний с непрерывно убывающей амплитудой.
, где — период колебаний с непрерывно убывающей амплитудой.
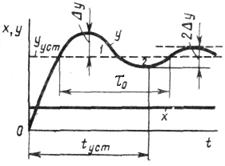
Рисунок 26
Время tуст, в течение которого выходной сигнал достигает значения, отличающегося на  Y от установившегося значения выходной величины Y, называется длительностью переходного процесса.
Y от установившегося значения выходной величины Y, называется длительностью переходного процесса.
Переходный процесс, показанный в соответствии с рисунком 26, называется периодическим в отличие от апериодического переходного процесса, показанного в соответствии с рисунком 25.
Выходной сигнал, показанный в соответствии с рисунком 27, изменяется периодически, при этом выходной сигнал Y сдвинут по фазе на угол j. В любой произвольный момент времени кривые X и Y имеют разность ординат. Эта разность называется абсолютной динамической погрешностью элемента.
У большинства элементов абсолютная динамическая погрешность после скачкообразного воздействия с течением времени не остается постоянной, а стремится к постоянному достаточно малому установившемуся значению.
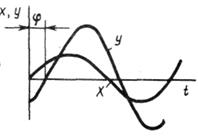
Рисунок 27








