 2020-08-05
2020-08-05 955
955
Термометрические датчики (термисторы) или терморезисторы, предназначены для измерения температуры путем преобразования измеряемого сигнала в изменение активного сопротивления. Термисторы бывают металлические и полупроводниковые.
Металлические термисторы изготовляются из чистых металлов с большим температурным коэффициентом сопротивления (медь, платина). Диапазон измеряемых температур для платиновых термисторов от минус 200 до 600°С, а для медных от минус 50 до 150°С. Точность измерения платиновых термисторов ±0,1°С, медных до ± 1°С. При более высоких температурах термисторы не применяются, так как в диапазоне высоких температур они имеют недостаточную точность и сильно окисляются.
Зависимость сопротивления металлических термисторов почти линейная:
Rt = Ro[1 + a(t - to)],
где a — температурный коэффициент сопротивления; Rо — сопротивление при tо, Ом; tо — начальная температура, °С; t — измеряемая температура, °С.
Линейность статической характеристики в других диапазонах температур нарушается.
В зависимости от назначения термисторы имеют различную конструкцию. Они изготовляются в виде нити, спирали, катушки и т. д. Термисторы нашли широкое применение для температурного контроля обмоток различных исполнительных механизмов (электродвигателей, катушек и т. д.).
Термисторы имеют один существенный недостаток: они обладают большой инерционностью. Постоянная времени термисторов изменяется от единиц до десятков секунд и зависит от диаметра провода.
Полупроводниковые термисторы изготовляются из окиси различных металлов (марганца, меди, никеля, титана и др.). Они имеют отрицательный температурный коэффициент сопротивления, что означает, что с увеличением температуры сопротивление полупроводника уменьшается. Наиболее широко полупроводниковые термисторы применяют в диапазоне температур от минус 100 до 120°С. В сравнении с металлическими полупроводниковые термисторы обладают большей чувствительностью и меньшей инерционностью. У них высокое внутреннее сопротивление, что позволяет не учитывать сопротивление соединительных проводов.
Недостатками полупроводниковых термисторов являются:
- узкий диапазон температур;
- нелинейность статической характеристики;
- разброс параметров между отдельными экземплярами.
Термисторы нашли широкое применение в измерительной технике.
Фоторезисторные датчики
Фоторезисторные датчики, или фотосопротивления, нашли широкое применение в системах автоматики для контроля с любым видом передаваемой информации:
- сигнализации;
- измерения;
- регистрации.
Фотосопротивления — это полупроводники, у которых число свободных электронов и электропроводность увеличиваются при освещении. Для фотосопротивлений применяется сернистый свинец (PbS), сернистый висмут (Bi2S2) и сернистый кадмий (CdS).
Конструкция фотосопротивлений весьма проста. Тонкий слой полупроводникового материала наносится на прозрачную пластинку, к которой прикрепляются электроды, осуществляющие контакт с полупроводниковым слоем. При подаче к электродам электрического напряжения через полупроводник пойдет ток, сила которого зависит от освещенности светочувствительной поверхности.
Зависимость тока от освещенности называется световой характеристикой фотосопротивления.
Ионные датчики представляют разнообразную подгруппу датчиков, у которых входная величина функционально связана с током ионной проводимости, а следовательно, и с омическим сопротивлением, которое обусловлено наличием ионов. С током ионной проводимости приходится преимущественно встречаться в жидких и газообразных средах.
На принципе действия ионных датчиков разработаны и применяются устройства с ядерными излучениями для измерения толщины, плотности и массы материалов, толщины покрытий, уровней самых различных материалов вплоть до расплавленных металлов, расхода жидкостей и газов, газового анализа и др.
Индуктивные датчики нашли широкое применение в системах автоматики для измерения линейного или углового перемещения. Принцип действия их основан на изменении индуктивности катушки с магнитопроводом при перемещении якоря. Простой принцип действия позволил создать целый ряд конструкций датчика. В соответствии с рисунком 35 индуктивный датчик с подвижным якорем представляет собой катушку 2 с ферромагнитным сердечником и с подвижным якорем 1.
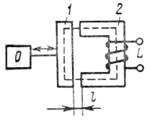
Рисунок 35
При перемещении якоря 1 датчика воздушный зазор изменяется, а следовательно, изменяется и индуктивность катушки 2. Ток в катушке датчика
I = U/Z = U  ,
,
где U — напряжение питания; Z — полное сопротивление катушки; R — активное сопротивление катушки;  = 2pfL — индуктивное сопротивление катушки; f — частота напряжения питания; L — индуктивность катушки, зависящая от воздушного зазора.
= 2pfL — индуктивное сопротивление катушки; f — частота напряжения питания; L — индуктивность катушки, зависящая от воздушного зазора.
При постоянных U, R и f ток катушки зависит только от ее индуктивности, а следовательно, от воздушного зазора. Таким образом, ток в катушке датчика пропорционален воздушному зазору, т. е.
I = KS,
где К — коэффициент пропорциональности или чувствительности датчика.
Реальная характеристика индуктивного датчика отличается от идеальной (показана пунктиром ) наличием некоторой нелинейности в соответствии с рисунком 36.
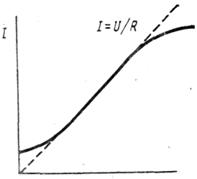
Рисунок 36
В соответствии с рисунком 37 индуктивный датчик с подвижным сердечником представляет собой катушку с подвижным ферромагнитным сердечником 1.
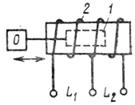
Рисунок 37
От средней точки обмотки сделан вывод, который позволяет создать измерительную схему. Когда сердечник находится в центре катушки, то в силу симметрии L1 = L2. При перемещении сердечника, например, вправо, индуктивность правой половины катушки L2 увеличивается, а левой L1 уменьшается. По изменению этих индуктивностей можно измерить значение перемещения сердечника. Эти датчики применяют для измерения значительных перемещений — до 50 мм. Статическая характеристика линейная.
Магнитоупругие датчики относятся к подгруппе индуктивных датчиков, так как принцип действия их основан на свойстве ферромагнитных материалов изменять магнитную проницаемость при упругих деформациях, вызываемых механической нагрузкой. Индуктивность же катушки прямо пропорциональна магнитной проницаемости магнитопровода катушки. Получается цепь последовательных преобразований: механическая сила — механическая напряженность — магнитная проницаемость — индуктивность. Магнитоупругие датчики применяются для измерения больших усилий.
Трансформаторные датчики имеют на своем выходе взаимоиндуктивность, и поэтому их также можно отнести к подгруппе индуктивных датчиков. Они отличаются от индуктивных датчиков тем, что используют на выходе явление электромагнитной индукции, однако это явление носит вспомогательный характер и используется для модулирования изменений напряжений на выходе. Наиболее распространенным типом трансформаторного датчика, получившим широкое применение в телемеханике для передачи на расстояние показаний различных приборов, является датчик с поворотной катушкой, называемой также индукционным преобразователем в соответствии с рисунком 38.
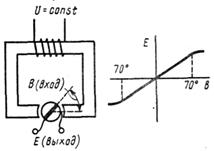
Рисунок 38
Катушка датчика изготовлена в виде рамки, пронизываемой переменным магнитным потоком, который создается обмоткой возбуждения, подключенной к источнику стабилизированного напряжения стандартной частоты. При повороте катушки меняется значение пронизывающего ее магнитного потока, а следовательно, и индуктированной ЭДС. С помощью полюсных наконечников можно получить прямолинейную статическую характеристику при повороте рамки на ±70° от нейтрального положения. Соединяя механической связью ось рамки с осью стрелки показывающего прибора, можно преобразовать показания прибора в электрическое напряжение.
Достоинством всей подгруппы индуктивных датчиков являются:
- отсутствие скользящих контактов;
- высокая чувствительность;
- сравнительная простота конструкции.
Недостатком всей подгруппы индуктивных датчиков являются:
- возможность работы только на переменном токе;
- трудность получения пулевого значения напряжения на выходе датчика;
- необходимость предохранения от помех.
Динамические свойства датчиков зависят от инерционности подвижных частей.
Емкостные датчики.
Емкостные датчики предназначены для преобразования измеряемой неэлектрической величины в изменение емкости. Датчик представляет собой плоский конденсатор с изменяемой емкостью.
Емкость плоского конденсатора
C=eS/d,
где e — абсолютная диэлектрическая проницаемость среды между пластинами; S — площадь пластин; d — расстояние между пластинами.
Изменяя e, S и d, можно получить три типа емкостных датчиков.
Емкостный датчик с переменным расстоянием между пластинами содержит две неподвижные пластины 1 и 2 и подвижную пластину 3, которая механически связана с измеряемым объектом в соответствии с рисунком 39.
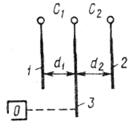
Рисунок 39
Когда d1 = d2, то C1 = C2. При перемещении подвижной пластины 3 влево, d1 уменьшается, a d2 — увеличивается. Из-за этого емкость между пластинами 1 и 3 увеличивается, а емкость между пластинами 2 и 3 уменьшается.
По изменению этих емкостей можно измерить линейное перемещение объекта (практически до 0,1 мм). Статической характеристикой такого датчика является гипербола, что не очень удобно для измерения перемещения.
Применяя такой тип датчика, следует учитывать не емкость, а реактивное емкостное сопротивление
Хс = 1/(wC) = d/ (we S),
которое прямо пропорционально расстоянию между пластинами, т. е. перемещению.
Для него статическая характеристика будет прямолинейна в соответствии с рисунком 40.
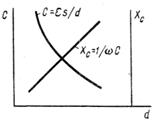
Рисунок 40
Емкостный датчик с поворотными пластинами, в соответствии с рисунком 41, представляет собой воздушный конденсатор, у которого одна группа пластин 1 неподвижна (обычно через одну пластину), а другая— может поворачиваться на некоторый угол a.
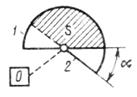
Рисунок 41
При a = 0 площадь перекрытия пластин S (заштрихована) наибольшая, поэтому емкость С между подвижными и неподвижными пластинами наибольшая. При повороте подвижных пластин на угол a площадь перекрытия и емкость датчика уменьшаются. Такие датчики применяются для измерения углов поворота от 0 до 180°.
Емкостный датчик с переменной диэлектрической проницаемостью, в соответствии с рисунком 42, представляет собой конденсатор с переменным диэлектриком.
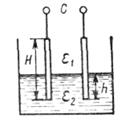
Рисунок 42
При разных величинах диэлектрической проницаемости воздуха e1 и перемещаемого диэлектрика e2 образуются два параллельно соединенных конденсатора, общая емкость которых
C = C1 + C2 = e1bH d + (e2 - e1)Rb/d,
где b — ширина пластин.
Отсюда видно, что при перемещении диэлектрика, т. е. при изменении уровня жидкости, изменяются перемещение h и емкость датчика С. По изменению емкости С определяют перемещение h. Такие датчики применяются для измерения уровня жидкости.
На принципе изменения диэлектрической проницаемости строятся также датчики для измерения влажности материалов, что позволяет автоматизировать это измерение, занимающее много времени при лабораторном его выполнении с помощью сушильных шкафов Принцип действия датчика основан на влажности измеряемого материала, влияющей на диэлектрическую проницаемость.
Достоинства емкостных датчиков:
- высокая чувствительность;
- простота;
- малая инерционность.
Недостатки емкостных датчиков:
- сильное влияние возможных побочных емкостей и посторонних электрических полей (необходима экранировка);
- значительное влияние температуры (изменяются размеры пластин) и влажности (изменяется e воздуха) окружающей среды.








