 2020-08-05
2020-08-05 220
220Під стійкістю неперервних систем в найзагальнішому випадку розуміють її властивість повертатись в початкове, або близьке до того, положення після зникнення дії факторів (збуджень) що вивели систему із стану початкової рівноваги.
Стійкість СУ є необхідною умовою можливості СУ розв’язувати поставлені перед нею завдання.
До алгебраїчних критеріїв стійкості належать критерії Рауса, Гурвіца, Льєнара-Шипара. До частотних критерій Михайлова, критерій Найквіста.
Алгебраїчні критерії дозволяють оцінювати стійкітсь за коефіцієнатами характерістичного рівняння замкненої системи:  .
.
Таблиця Рауса
| Коефіцієнт | РЯДОК
| СТОВПЕЦЬ | |||
| 1 | 2 | 3 | 4 | ||
| - | 1 | 
| 
| 
| … |
| - | 2 | 
| 
| 
| … |

| 3 | 
| 
| 
| … |
| … | … | … | … | … | … |

| 
| 
| 
| 
| … |
| … | … | … | … | … | … |


Умова стійкості Рауса формується так: для того щоби система автоматичного регулювання була стійка, необхідно і достатньо, щоби коефіцієнти першого стовпця таблиці Рауса малиоднакові знаки, тобто при an>0 були додатними:  ;
;  ;
;  ;
;  ;
;  . Якщо не всі коефіцієнти першого стовпця позитивні, то система нестійка, а число правих коренів (індекс нестійкості) характеристичного рівняння дорівнює числу змін знака в першому стовпці таблиці Рауса.
. Якщо не всі коефіцієнти першого стовпця позитивні, то система нестійка, а число правих коренів (індекс нестійкості) характеристичного рівняння дорівнює числу змін знака в першому стовпці таблиці Рауса.
 Критерій стійкості Гурвіца
Критерій стійкості Гурвіца
Критерій стійкості Гурвіца: для того щоби система автоматичного керування була стійка, необхідно і достатньо, щоб усі визначники Гурвіца мали знаки, однакові зі знаком старшого коефіцієнта характеристичного рівняння an, тобто при an >0 були додатними.
 Визначники:
Визначники:
У критерії Михайлова в якості визначальної використовується крива, яку описує кінець вектора:  при зміні
при зміні  від
від  до
до  .
.
Сформулюємо критерій стійкості Михайлова: для того щоби лінійна система автоматичного керування, що має характеристичне рівняння n-го порядку, була стійкою, необхідно і достатньо, щоби при зміні W від 0 до  повна зміна аргументу вектора
повна зміна аргументу вектора  повинна дорівнювати
повинна дорівнювати  , де
, де  – степінь характеристичного рівняння. Іншими словами, крива Михайлова повинна бути розташована так, щоб послідовно n перетинати квадрантів.
– степінь характеристичного рівняння. Іншими словами, крива Михайлова повинна бути розташована так, щоб послідовно n перетинати квадрантів.
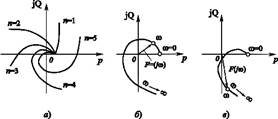 На рис. а зображені криві Михайлова для стійких систем від першого до п'ятого порядків. Криву Михайлова для стійкої системи називають правильною. На рис. б, в показані кр.Мих. для стійкої і нестійкої систем четвертого порядку.
На рис. а зображені криві Михайлова для стійких систем від першого до п'ятого порядків. Криву Михайлова для стійкої системи називають правильною. На рис. б, в показані кр.Мих. для стійкої і нестійкої систем четвертого порядку.
Критерій Найквіста базується на частотних характеристиках розімкненого кола системи автоматичного керування і дає правило, згідно до якого по вигляду частотної характеристики розімкненого кола можна судити про стійкість замкненої системи. Звідси одержуємо наступне формулюваннячастотного критерію Найквіста: якщо розімкнене коло системи стійке, то для стійкості замкненої системи необхідно і достатньо, щоб амплітудно-фазова частотна характеристика розімкненого кола не охоплювала точку (-1,j0).








