 2020-08-05
2020-08-05 254
254Абсолютные датчики углового положения. Среди обширного класса измерительных преобразователей угловых перемещений абсолютные датчики углового положения занимают особое место. Эти датчики позволяют решать задачи прецизионных измерений не только величин угловых перемещений, но и без потери точности могут обеспечить «жесткую» координатную привязку различного рода позиционируемых объектов при их статическом положении. Часто абсолютные датчики углового положения называют абсолютными энкодерами, преобразователями считывания углового положения или преобразователями угол-код.
Абсолютные датчики углового положения каждому значению углового положения вала (преобразуемого угла) ставят в соответствие значение числового эквивалента, который формируется на выходе датчика, как правило, в виде цифрового кода. При этом указанное взаимно однозначное соответствие сохраняется, как при движении вала, так и при его неподвижном положении и не требует возвращения вала в начальную позицию. Таким образом, значение кода не теряется после выключения и включения питания датчика, восстанавливается после прохождения помехи или превышения допустимой скорости вращения вала, ограничиваемой правильным считыванием кода. Приведённые свойства выгодно отличают абсолютные датчики углового положения от инкрементных угловых преобразователей.
Эталоном угловой меры в абсолютных датчиках служит установленный на входном валу измерительный лимб с кодовой шкалой, имеющей обычно многодорожечную кольцевую структуру. Упрощенное изображение оптического диска с 4-х разрядным кодом (позволяющим различать 16 положений диска) приведено на рисунке 33. В изображенной конструкции младшему разряду кода соответствует внутренняя кольцевая дорожка диска, а старшему – внешняя, причем закрашенные, непрозрачные, участки дорожек соответствуют логическим единицам, а прозрачные – нулям, т.е. применена инверсная кодировка.
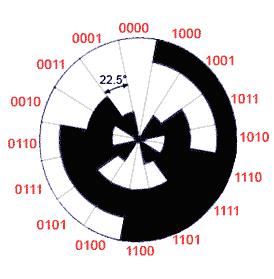
Рисунок 33
В основе принципа действия таких датчиков лежит анализ сочетания уровней сигналов дискретных фотоприемников, располагаемых по одному напротив каждой из концентрических кольцевых кодовых дорожек.
Совокупность указанных фотоприемников образует считывающее фотоприёмное устройство (матрицу считывающих фотопремников), конкретное выполнение которого определяется структурой используемого кода и конструкцией датчика.
В абсолютных датчиках углового положения для увеличения угловой разрешающей способности увеличивают разрядность кода, соответствующую числу кольцевых кодовых дорожек. Пример измерительного лимба с 9-ти дорожечной кодовой шкалой приведен на рис. 34. На данном диске младшему разряду соответствует внешняя кольцевая дорожка, и с точки зрения технологичности изготовления диска это оправдано, т.к. прорези на дорожке младшего разряда чередуются чаще и имеют меньший угловой размер, а внешняя дорожка имеет больший периметр, и поэтому прорези того же углового размера получаются более широкими, их легче прорезать.
Рисунок 34
Как правило, для многодорожечных шкал датчиков положения используют позиционные коды. Их особенность заключается в том, что в отличие от обычных кодов, они обладают свойством непрерывности бинарной комбинации (так называемая «одношаговость кода»): изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Это свойство позволяет свести погрешность считывания кода к значению младшего разряда, обеспечив, тем самым, высокую информационную надёжность преобразования угол-код. Наибольшее распространение среди кодов этого класса получил код Грея. Пример для 4-разрядного кода приведен на рис.35, а также реализован на лимбе, изображенном на рис.33.
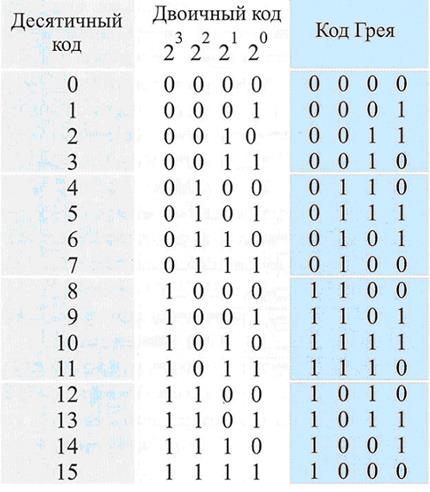
Рисунок 35
Для осуществления дальнейшей обработки Грей-кода его преобразуют в двоичный код. Реализацию такого кодового преобразования легко осуществить с помощью логических элементов «исключающее или» аппаратным или программным способами.
Устройство абсолютного датчика углового положения показано на рис.36
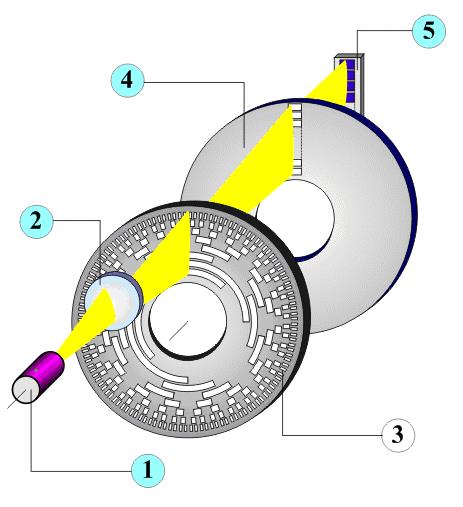
Рисунок 36
Формируемый светодиодом 1 и конденсором 2 плоский пучок лучей создаёт в плоскости анализирующей маски 4 теневое изображение измерительного лимба 3. Анализирующая маска, представляет собой совокупность щелевых диафрагм, выделяющих необходимые для анализа участки изображения кодовой шкалы. За каждой диафрагмой по ходу лучей установлен дискретный фотоприемник, располагаемый в зоне теневого изображения соответствующей кольцевой дорожки кодовой шкалы, В распространённом случае считывающее фотоприемное устройство представляет собой анализирующую маску в виде одной узкой щелевой диафрагмы с установленной за ней линейкой фотодиодов 5.
Конструктивно абсолютный датчик включает в себя оптико-механический узел, оптико-электронное считывающее устройство, а также электронную схему выделения и обработки сигналов фотоприёмников.
Оптико-механический узел датчика представляет собой корпусную деталь с прецизионными направляющими, обеспечивающими вращательное движение вала и жестко связанного с ним измерительного лимба.
Оптико-электронное считывающее устройство содержит узел осветителя и считывающее фотоприемное устройство (матрицу фотоприемников с установленной перед ней анализирующей маской), а также электронную схему выделения и обработки сигналов фотоприемников.
В зависимости от уровня сигналов, снимаемых с фотоприемников, им присваиваются значения 0 или 1, то есть получаемые кодовые комбинации являются бинарными кодами.








