 2020-08-05
2020-08-05 309
309Принцип их работы основан на изменении индуктивного сопротивления катушки с ферромагнитным сердечником. Датчики индуктивности широко применяют благодаря их существенным достоинствам: простоте, надежности и отсутствию скользящих контактов; возможности непосредственного использования показывающих приборов за счет относительно большой величины отдаваемой электрической мощности; возможности работы на переменном токе промышленной частоты.
Основной областью применения индуктивных датчиков является измерение угловых и линейных механических перемещений. Изменение входного параметра в датчиках индуктивности преобразуется в изменение индуктивности катушки благодаря перемещению якоря, сердечника или катушки.
Индуктивные датчики применяют только на относительно низких частотах (до 3000-5000 Гц), так как на высоких частотах резко возрастают потери в стали на перемагничивание и реактивное сопротивление обмотки.
Для устранения недостатков, свойственных рассмотренному датчику индуктивности, которые состоят в том, что для измерения перемещения якоря в обоих направлениях необходимо иметь начальный воздушный зазор, т.е. и начальную силу тока, из-за чего создается неудобство в измерении, значительные погрешности от колебаний температуры и питающего напряжения, а также для устранения электромеханического усилия притяжения якоря, зависящего от величины воздушного зазора, применяют дифференциальный индуктивный датчик.
Дифференциальные индуктивные датчики (рис.31) представляет собой совокупность двух нереверсивных датчиков и выполняются в виде системы, состоящей из двух магнитопроводов с общим якорем и двумя катушками.
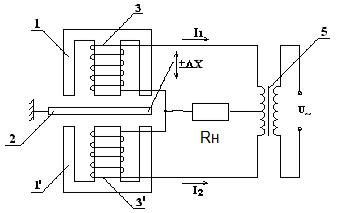
Рисунок 31
Для питания дифференциально-индуктивного датчика используют трансформатор 5 с выводом средней точки на вторичной обмотке. Между ним и общим концом обеих катушек включается прибор 4. Воздушный зазор 0,2-0,5 мм.
При среднем положении якоря, когда воздушные зазоры одинаковы, индуктивные сопротивления катушек 3 и 3' одинаковы следовательно величины токов в катушках равны I1=I2 и результирующий ток в приборе равен 0.
При небольшом отклонении якоря в ту или иную сторону под действием контролируемой величены Х меняются величины зазоров и индуктивностей, прибор регистрирует разностный ток I1-I2, он является функцией смещения якоря от среднего положения. Разность токов создает падение напряжения на нагрузке Rн.
Характеристика индуктивного датчика имеет вид, показанный на рис 32
Рисунок 32
Полярность выходного тока остается неизменной независимо от знака изменения полного сопротивления катушек. При изменении направления отклонения якоря от среднего положения меняется на противоположную (на 180°) фаза тока на выходе датчика. При использовании фазочувствительных выпрямительных схем можно получить индикацию направления перемещения якоря от среднего положения.
Информативная способность индуктивного датчика в значительной мере определяется его погрешностью преобразования измеряемого параметра. Суммарная погрешность индуктивного датчика складывается из большого числа составляющих погрешностей.
Можно выделить следующие погрешности индуктивного датчика:
1) Погрешность от нелинейности характеристики. Является существенной и в большинстве случаев определяет диапазон измерения датчика.
2) Температурная погрешность. Ввиду большого числа зависимых от температуры параметров составных частей датчика может достичь больших величин и является существенной.
3) Технологические погрешности. Возникают вследствие технологических отклонений взаимного положения деталей датчика, разброса параметров деталей и обмоток при изготовлении, влияния технологических зазоров и натягов в соединении деталей и в направляющих.
Емкостные датчики
представляет собой обычный плоский или цилиндрический конденсатор, изменение емкости которого происходит либо за счет перемещения одной из пластин, либо за счет изменения диэлектрической постоянной среды ε, находящейся между пластинами.
Для двухобкладочного плоского конденсатора электрическая емкость определяется выражением:
С = ε0εS/h
где ε 0 - диэлектрическая постоянная; ε - относительная диэлектрическая проницаемость среды между обкладками; S - активная площадь обкладок; h - расстояние между обкладками конденсатора.
Зависимости C (S) и C (h) используют для преобразования механических перемещений в изменение емкости.
Емкостные датчики, также как и индуктивные, питаются переменным напряжением (обычно повышенной частоты - до десятков мегагерц). В качестве измерительных схем обычно применяют дифференциальные схемы (подобные примененным в дифференциальных индуктивных датчиках) и схемы с использованием резонансных контуров. В последнем случае, как правило, используют зависимость частоты колебаний генератора от емкости резонансного контура, т.е. датчик имеет частотный выход.
Достоинства емкостных датчиков - простота, высокая чувствительность и малая инерционность. Недостатки - влияние внешних электрических полей, относительная сложность измерительных устройств.
Емкостные датчики применяют для измерения угловых перемещений, очень малых линейных перемещений, вибраций, скорости движения и т. д.,
Емкостные преобразователи, диэлектрическая проницаемость ε которых изменяется за счет перемещения, деформации или изменения состава диэлектрика, применяют в качестве датчиков уровня непроводящих жидкостей, сыпучих и порошкообразных материалов, толщины слоя непроводящих материалов (толщиномеры), а также контроля влажности и состава вещества.








