 2020-08-05
2020-08-05 211
211В любом следящем приводе можно условно выделить два канала
распространения сигналов:
1) канал управления (информационный канал), по которому
передаются сигналы управления с входа привода к объекту управления;
2) энергетический канал (силовая часть), по которому преобразуемая энергия распространяется от источника питания к объекту управления.
В канал управления типичного приборного следящего электрического привода (ЭСП) входят: датчик рассогласования с использованием синусно-косинусных или линейных вращающихся трансформаторов (СКВТ или ЛВТ), фазочувствительный выпрямитель, сглаживающий фильтр, усилитель постоянного тока, последовательное корректирующее устройство, суммирующее устройство, модулятор длительности импульсов, усилитель мощности, исполнительный двигатель и редуктор.
В энергетический канал входят: выходной каскад усилителя мощности, исполнительный двигатель и редуктор. Для обеспечения высокого коэффициента полезного действия, выходные каскады мостового усилителя мощности работают в ключевом режиме. Наиболее часто в приборных ЭСП используется симметричный закон коммутации транзисторов выходного каскада усилителя мощности. При этом законе транзисторы выходного каскада усилителя мощности, находящиеся в разных диагоналях мостовой схемы, коммутируются в противофазе.
Для обеспечения требуемых динамических свойств ЭСП используются последовательные корректирующие устройства, включаемые в цепь ошибки ЭСП и параллельные корректирующие устройства, включаемые в цепи местных обратных связей по скорости и по ускорению следящего вала. Местные обратные связи по скорости реализуются с помощью тахогенератора, соединенного с валом исполнительного двигателя. Сигналы параллельных корректирующих устройств суммируются с сигналом последовательного корректирующего устройства в суммирующем устройстве.
Для анализа функционирования и синтеза приводов с различными структурами разработана виртуальная лабораторная работа, позволяющая реализовать системы, управляющие положением и скоростью объекта управления, а также реализовывать различного вида корректирующие последовательные и параллельные устройства. Функциональная схема, имеющего возможности реализовать все выше перечисленные устройства, показана на рисунке 1.
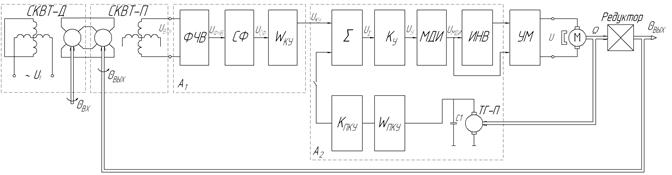
Рис.1. Функциональная схема следящего привода
Здесь:
СКВТ – Д и СКВТ – П датчик рассогласования с использованием синусно-косинусных вращающихся трансформаторов (SKVT);
ФЧВ – фазочувствительный выпрямитель (DM)
СФ – сглаживающий фильтр (filter);
WКУ – последовательное корректирующее устройство (Correction Arrangement)
∑ – суммирующее устройство;
КУ – коэффициент усиления (КУ);
МДИ – модулятор длительности импульсов (MDI);
ИНВ – инвертор;
УМ – усилитель мощности (Kym);
ТГ-П – тахогенератор (Ktg);
KПКУ, WПКУ – параллельное корректирующее устройство (Knky, Wnky);
М – двигатель (DPR52).
Здесь и в дальнейшем в скобках приведены обозначения, используемые в схемах моделирования.

Рис.2. Структурная схема привода с последовательной коррекцией
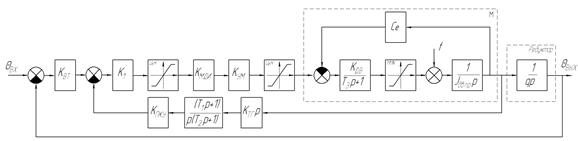
Рис.3. Структурная схема привода с параллельной коррекцией
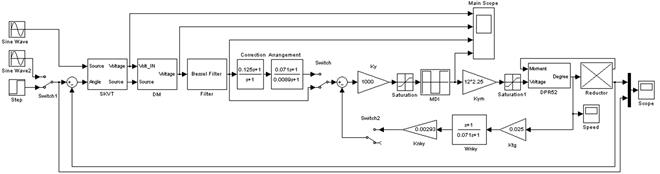
Рис.4. Схема моделирования следящего привода
Измеритель рассогласования на двух СКВТ (датчика с коэффициентом трансформации 1 и приемника с коэффициентом трансформации 0,56)
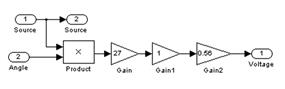
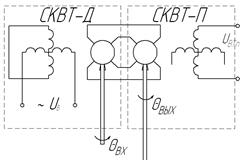
Рис.5. Принципиальная электрическая Рис.6.Схема моделирования
схема Датчика рассогласования на СКВТ
На СКВТ подается входной сигнал низкой частоты (Angle) или меандр(Step), а также несущий высокочастотный сигнал (Source). Сигнал на выходе формируется перемножением этих сигналов. В схеме моделирования учтены коэффициенты трансформации и напряжение, равное 27В 400 Гц.
Фазочувствительный выпрямитель( ФЧВ)
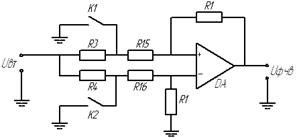
Рис.7. Принципиальная электрическая схема Рис.8. Схема моделирования
фазочувствительного выпрямителя
Фазочувствительный выпрямитель представляет собой схему демодулятора с коэффициентом усиления равным 1.
Электрическая схема работает следующим образом. При подачи на вход ключевой микросхемы К1 положительной полуволны напряжения возбуждения вращающегося трансформатора датчика он открывается и шунтирует инвертирующий вход операционного усилителя DA. Ключ К2 при этом закрыт и напряжение с СКВТ – П поступает на неинвертирующий вход операционного усилителя DA. При приходе отрицательной полуволны напряжения возбуждения СКВТ – П сигнал проходит по каналу инвертирующего входа DA. Модель ФЧВ состоит, из двух ключей, которые открываются при наступлении определенного условия, в данном случае это знак несущего сигнала (Source). Так для открытия первого ключа, необходимо положительное напряжение, для второго – отрицательное. Разница сигналов полученных таким образом, формирует сигнал на выходе фазочувствительного выпрямителя.
Диаграмма напряжений ФЧВ приведена на рисунке 9.
|
| Несущий сигнал (напряжение возбуждения СКВТ) |
| Сигнал на выходе СКВТ | |
| Сигнал на выходе ФЧВ (однополупериодное выпрямление) | |
| Сигнал на выходе ФЧВ (двухполупериодное выпрямление) |
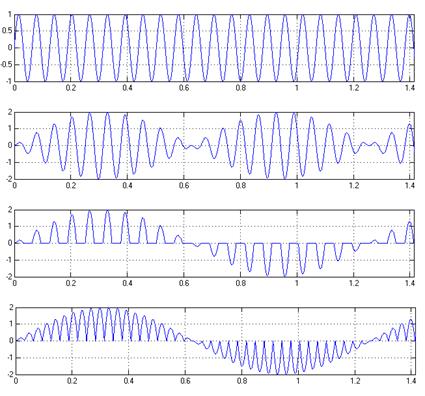
Рис.9. Диаграмма напряжений ФЧВ
Сглаживающий фильтр ( СФ).
СФ на выходе демодулятора необходим для устранения несущей частоты и выделения полезного сигнала, несущего информацию об угле поворота.
В работе используется интегрирующий фильтр(2) и фильтр Бесселя (1) нижних частот третьего порядка с частотой среза 100Гц.
Фильтр Бесселя в отличии от апериодического фильтра обеспечивает наилучшее сглаживание входного сигнала за счет наличия более высокого порядка и небольшого фазового сдвига в области рабочих частот привода.
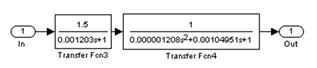

Рис.10. Принципиальная электрическая схема Рис.11. Схема моделирования
фильтра Бесселя третьего порядка
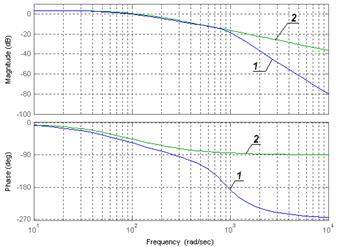
Рис.12. Частотные характеристики.
1 – ЛАФЧХ фильтра Бесселя
2 – ЛАФЧХ апериодического фильтра








