 2020-08-05
2020-08-05 142
142МДИ преобразует медленноменяющийся сигнал в последовательность прямоугольных импульсов, скважность которых пропорциональна величине сигнала. Частота следования импульсов выбирается, исходя из анализа энергетических характеристик системы ИУ-Д» (для данной системы это 5000 Гц). На вход триггера подается управляющее напряжение, пилообразное напряжение и напряжение смещения.
 |
Рис.13.Принципиальная электрическая Рис.14. Схема моделирования
схема МДИ
Напряжение смещения выбирается таким образом, чтобы при нулевом входном сигнале для системы с симметричным законом управления скважность составляла  . В настоящее время в качестве пороговых элементов в МДИ используются специальные микросхемы - триггер Шмидта - микросхемы ТЛ, а для получения МДИ, имеющих большой коэффициент передачи в качестве пороговых элементов используют интегральные операционные усилители. Принципиальная схема такого МДИ представлена на рис. 13.
. В настоящее время в качестве пороговых элементов в МДИ используются специальные микросхемы - триггер Шмидта - микросхемы ТЛ, а для получения МДИ, имеющих большой коэффициент передачи в качестве пороговых элементов используют интегральные операционные усилители. Принципиальная схема такого МДИ представлена на рис. 13.
Генератор пилообразного напряжения Fпил (Saw-edged signal) генерирует сигнал пилообразной формы, частота которого выбирается исходя из анализа энергетических характеристик системы «импульсный усилитель – двигатель, который сравнивается с сигналом, поступающим с усилителя. Происходит преобразование медленно меняющегося сигнала в периодическую последовательность прямоугольных импульсов с широтно-импульсной модуляцией.
| А)
| |
| В) |
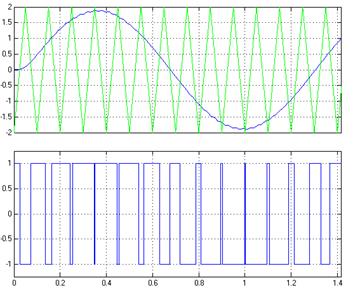
Рис.15.Диаграммы напряжений МДИ. А - сигналы на входе МДИ, В - сигнал на выходе МДИ
Остальные элементы следящего привода собраны в соответствии со структурными схемами рис. 2 и 3.
Контрольное тестирование с целью проверки изученного теоретического материала, изложенного выше, а также соответствующих разделов лекционного курса, и допуска к выполнению лабораторной работы.
1. Откройте папку «Тесты к вирт. лаб. №1».
2. Запустите программу tester.exe. Пароль «718».
3. Ответьте на все поставленные вопросы.
4. В случае, если вы ответили более чем на 60% вопросов, то приступайте к выполнению работы.
5. Если количество правильных ответов было меньше 60%, то вновь изучите теорию и пройдите повторный курс тестирования.
III. ОБЪЕКТ ИССЛЕДОВАНИЯ И ОБОРУДОВАНИЕ
Объектами исследования являются математические модели реверсивного электрического привода и его элементов, разработанных в среде MATLAB и Simulink. Для выполнения работы необходим, современный компьютер с установленными операционной системой Windows XP, MATLAB 6.5, программой «БАНКИР 7.5».
IV. ЗАДАНИЕ НА РАБОТУ
1. Изучить модель следящей системы, функциональное назначение и принципы работы отдельных элементов модели, их взаимодействие.
2. Исследовать динамические характеристики следящей системы: изучить влияние величины коэффициента усиления в прямой цепи, типа и характеристик сглаживающего фильтра на характер переходных процессов и частотные характеристики замкнутой системы.
V. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
I. Изучение принципов работы отдельных элементов модели и их взаимодействие. Все модели, используемые в работе, находятся в папке «work» пакета MATLAB, которые должны быть предварительно открыты.
Откройте файл «SKVT.mdl».
Запустить файл «SKVT.mdl».
Изучите полученные диаграммы.
Используя возможности программы «simulink» просмотрите все параметры и коэффициенты трансформации СКВТ – Д и СКВТ – П.
(Исходная частота напряжения возбуждения СКВТ взята нереальной для обеспечения лучшего понимания происходящего процесса.)
Измените типы СКВТ – Д и СКВТ – П по своему усмотрению, взяв их из таблицы 1 и занесите измененные параметры в модель SKVT.
Таблица 1. Технические данные ВТ серии 2,5БВТ
| Обозначение (тип) ВТ | Назначение ВТ | Напряжение возбуждения, В | Z01, Ом | К | ||||
| Номинальное | Рабочий диапазон | |||||||
| 2,5БВТ-Д | ВТДП-Д | 12 | 0-12 | 200 | 0,56 | |||
| СКВТ |
|
| ||||||
| 2,5БВТ-П | ВТДП-П | 12 | 0-27 | 800 | 1 | |||
| 2,5БВТ-С | СКВТ | 12 | 0-12 | 200 | 0,56 | |||
| 2,5БВТ-Л | ЛВТ | 12 | 0-12 | 200 | 0,52 | |||
| 2,5БВТ-2 | СКВТ | 12 | 0-12 | 400 | 0,56 | |||
| Диапазон рабочих частот напряжения возбуждения, Гц | 380-21000 | |||||||
Используя функцию PrintScreen и графический редактор Paint, сохраните полученные процессы.
Запустите файл «DM.mdl».
Изучите полученные диаграммы.
Используя возможности программы «simulink» просмотрите все параметры напряжений возбуждения (source) и рабочего (Sine wave).
(Исходная частоты напряжения взяты теми же, что и в схеме «SKVT.mdl»).
Измените величины этих напряжений и частот в соответствии с проделанным в предыдущем пункте и занесите измененные параметры в модель «DM.mdl».
Используя функцию PrintScreen и графический редактор Paint, сохраните полученные процессы.
Запустите файл «Shim.mdl».
Проделайте те же операции, что и в предыдущих пунктах.
Запустите файл «model_sum.mdl».
Проследите последовательно все процессы преобразования сигналов в измерителе рассогласования (СКВТ – Д и СКВТ – П), демодуляторе и модуляторе длительности импульсов.
II. Исследование динамических характеристик следящей системы: изучить влияние величины коэффициента усиления в прямой цепи, типа и характеристик сглаживающего фильтра на характер переходных процессов и частотные характеристики замкнутой системы.
2. Изучение влияния коэффициента усиления по разомкнутому контуру (прямой цепи) на динамические характеристики следящей системы.
Запустите файл «model. mdl».
2.3. Получите модель системы с последовательной коррекцией, установив ключи S1 и S2 в положение 1.
2.4. Установите ступенчатый входной сигнал 0.01В
2.5. Устанавливая коэффициент усиления Ку 30, 300, 3000, изучите характер переходных процессов на выходе системы.
2.6. Используя функцию PrintScreen и графический редактор Paint, сохраните полученные процессы.
2.7. Сделайте выводы об устойчивости и точности системы
2.8. Получите модель системы с параллельной коррекцией, установив ключи S1 и S2 в положение 2.
2.9. Устанавливая коэффициент усиления Ку 30, 300, 3000, изучите переходные процессы в системе.
2.10. Используя функцию PrintScreen и графический редактор Paint, сохраните полученные процессы.
2.11. Сделате выводы об устойчивости системы.
3. Изучение влияния сглаживающего фильтра.
3.1. Ключи S1 и S2 в положение 1, Ку = 300
3.2. Установите ступенчатый входной сигнал 0.01В
3.3. Для изменения типа фильтра, установите в блоке Filter значение параметра Type filter равным 1 или 2, который соответствуют фильтру Бесселя или апериодическому фильтру. Изучите характер переходных процессов на выходе системы для данных типов сглаживающего фильтра.
3.4. Сохраните полученные процессы и сделать выводы о характере влияния сглаживающего фильтра на работу системы.
4. Влияние частоты входного сигнала на динамические характеристики следящей системы.
4.1. Ключи S1 и S2 в положение 1, Ку = 300
4.2. Установите синусоидальный входной сигнал амплитудой 0.1 В и частотой 1 рад/c, изучите переходные процессы в системе.
Проведите аналогичные действия для частот 5 и 10 рад/c
4.3. Сохранить полученные процессы и сделать выводы.
5. Используя линеаризованную модель (Linear model) оценить ЛАФЧХ системы.
(Tools→Linear analysis; Simulink→Get Linearized Model; Plot type→Bode)
YI. УКАЗАНИЯ ПО ОФОРМЛЕНИЮ ОТЧЕТА
Отчет о работе должен содержать.
1. Блок-схемы привода.
2. Диаграммы напряжений во всех изученных элементах.
3. Переходные процессы и частотные характеристики системы.
4. Все необходимые выводы по работе.
YII. КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Объяснить функциональное назначение и принцип работы элементов следящей системы?
2. Как осуществляется управление частотой вращения двигателя в
данной следящей системе?
3. Какой сигнал и почему используется для осуществления обрат
ной связи по скорости вращения вала двигателя?
4. Как влияет коэффициент усиления системы в прямой цепи на характер переходных процессов в системе?
5. Какие требования предъявляются к характеристикам сглаживающего фильтра?
6. Что произойдет с системой, если существенно увеличит коэффициент усиления в разомкнутом контуре?
6. На основе анализа каких характеристик привода определяется частота ШИМ выходного каскада усилителя мощности?
YIII. БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Электропривод летательных аппаратов. /Под ред. В.А. Полковникова. - Москва, Машиностроение, 1990 г.-352стр.
2. Следящие приводы. Том 2 / Под ред. Б.К. Чемоданова – Изд-во МГТУ, 2003г.-880 с.
3. Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. - СПб.: КОРОНА принт, 2001. - 320 с., ил.
4. Проектирование следящих систем. /Под ред. Н.А. Лакоты. - Москва, Машиностроение, 1992 г.-352стр








