 2020-09-24
2020-09-24 632
632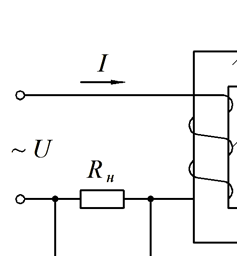 Индуктивные преобразователи служат для преобразования угловых и линейных перемещений в электрический сигнал. На рис. 2.9 показана схема простейшего индуктивного преобразователя, состоящего из магнитного сердечника 1 с обмоткой 2 и якоря 3. Между полюсами сердечника и якорем имеется воздушный зазор δ.
Индуктивные преобразователи служат для преобразования угловых и линейных перемещений в электрический сигнал. На рис. 2.9 показана схема простейшего индуктивного преобразователя, состоящего из магнитного сердечника 1 с обмоткой 2 и якоря 3. Между полюсами сердечника и якорем имеется воздушный зазор δ.
Расчет магнитных цепей изучен в ТОЭ. Примем допущения (довольно грубые):
- потоками рассеяния и потерями в стали пренебрегаем;
- магнитное сопротивление воздушного зазора много больше магнитного сопротивления магнитопровода;
- индуктивное сопротивление обмотки много больше активного ее сопротивления и сопротивления нагрузки.
При этих допущениях действующее значение выходного напряжения преобразователя
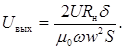 (2.15)
(2.15)
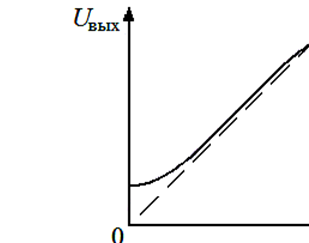
В приведенном выражении переменной величиной является δ. График зависимости Uвых(δ) представляет собой прямую, проходящую через начало координат (рис. 2.10, штриховая линия). Реальная характеристика показана сплошной линией.
Отличие реальной характеристики от линейной при малых значениях δ объясняется тем, что при таких δ магнитное сопротивление магнитопровода преобразователя становится соизмеримым с магнитным сопротивлением воздушного зазора, поэтому пренебрежение величиной приводит к появлению погрешности. Отклонение реальной характеристики от линейной при больших значениях δ объясняется тем, что индуктивность существенно уменьшается, поэтому индуктивное сопротивление становится соизмеримым с активным сопротивлением, что и вызывает отклонение характеристики.
Рассмотренный индуктивный преобразователь имеет следующие недостатки: а) невысокая линейность; б) на якорь постоянно действует электромагнитная сила, стремящаяся притянуть его к полюсам сердечника. Из-за указанных недостатков такие преобразователи применяются редко.
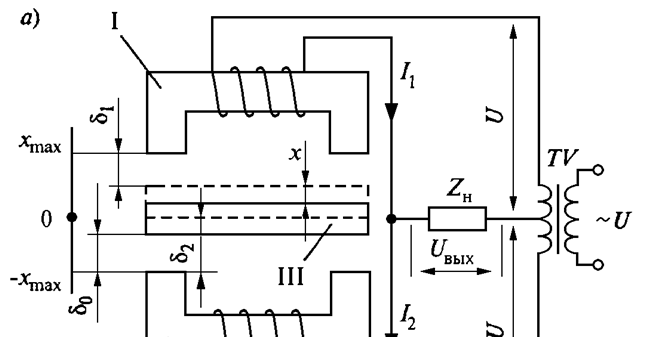
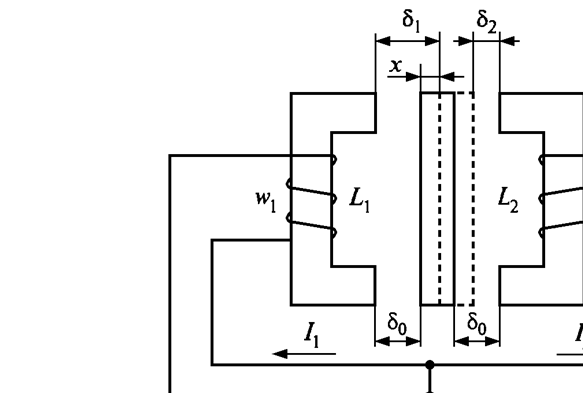
Реверсивные индуктивные преобразователи. Получили наиболее широкое распространение. Существуют две основные схемы включения реверсивных индуктивных преобразователей: дифференциальная и мостовая. Дифференциальная схема включения показана на рис. 2.11, а. Реверсивный индуктивный преобразователь состоит из двух простейших.
Магнитная система имеет два одинаковых сердечника I и II иобщий якорь III. Обмотки сердечников содержат одинаковое число витков. Сопротивление нагрузки включается между средней точкой вторичной обмотки трансформатора TV и средней точкой обмоток сердечников. При таком включении ток нагрузки равен разности токов верхней и нижней половин схемы:
İ = İ 1 – İ 2. (2.16)
При активной нагрузке Z н = R н выходное напряжение равно
Ů н = R н (İ 1 – İ 2) = Ů 1 – Ů 2. (2.17)
В нейтральном положении якоря (х = 0) зазоры между полюсами сердечника и якорем одинаковы: δ1 = δ2 = δ0. Индуктивности обмоток также равны: L1 = L2, поэтому токи I 1 и I 2 равны по модулю, а ток нагрузки I = 0. Следовательно, и выходное напряжение преобразователя равно нулю. Таким образом, при входном сигнале, равном нулю, выходной сигнал также равен нулю.
Перемещение якоря вверх приведет к уменьшению верхнего воздушного зазора и увеличению нижнего:
δ1 = δ0 – х; δ2 = δ0 + х, (2.18)
где х – перемещение якоря.
Изменение зазоров вызовет увеличение индуктивного сопротивления обмотки верхнего сердечника и уменьшение индуктивного сопротивления обмотки нижнего сердечника. При этом ток I 1 уменьшится, а ток I 2 возрастет. В нагрузке потечет результирующий ток и появится выходное напряжение. Если же якорь перемещается вниз – I 2 уменьшится, а ток I 1 возрастет, что также вызовет появление результирующего тока, фаза которого на 180° будет отличаться от фазы результирующего тока при перемещении вверх.
Зависимость напряжений U 1 и U 2 от перемещения можно получить, воспользовавшись кривой на рис. 2.10. При построении кривых следует учесть, что при изменении х от хmax до – хmax δ1 изменяется от 0 до 2δ0, а δ2 изменяется в это же время от 2δ0 до 0. На рис. 2.11, б показаны кривые U 1, и U 2 и их разность U вых. Характеристика U вых = f(x) проходит через начало координат. Изменение знака U вых при изменении знака x соответствует изменению фазы выходного напряжения преобразователя на 180°.
В мостовой схеме реверсивного индуктивного преобразователя (рис. 2.12) обмотки сердечников включаются в смежные плечи моста. Переменное напряжение подается в одну диагональ моста, выходное напряжение снимается с другой диагонали.
| (4.7) |
| СЕВ |
Реверсивные индуктивные преобразователи по сравнению с нереверсивными имеют следующие преимущества:
1) линейная часть выходной характеристики имеет большую протяженность;
2) электромагнитное усилие, действующее на якорь, значительно меньше усилия в нереверсивном преобразователе. Это объясняется частичной компенсацией электромагнитных усилий, действующих со стороны сердечников I и II. Полная компенсация происходит в нейтральном положении якоря.
Рассмотренные реверсивные индуктивные преобразователи позволяют измерять перемещение от нескольких микрон до десятых долей миллиметра. Нижний предел обусловлен технологическими трудностями создания малых воздушных зазоров. Верхний предел объясняется значительным уменьшением чувствительности при больших воздушных зазорах из-за появления потоков рассеяния.
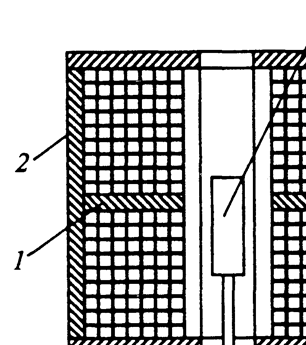
Для измерения больших перемещений применяются цилиндрические реверсивные индуктивные преобразователи. На рис. 2.13 показан реверсивный индуктивный преобразователь, у которого рабочий диапазон измеряемых перемещений достигает нескольких миллиметров.
Магнитопровод преобразователя 2 выполняется в виде цилиндрической трубки, которая вместе с двумя крышками 4 выполняет роль ярма. Якорь 3 также имеет цилиндрическую форму. Диск 1 из ферромагнитного материала предназначен для увеличения магнитной проводимости между трубкой и якорем. По обе стороны от диска устанавливаются две цилиндрические катушки 5. Как правило, преобразователь имеет две одинаковые катушки. Принцип действия преобразователя аналогичен принципу действия реверсивного индуктивного преобразователя, рассмотренного выше.
 Включение цилиндрических реверсивных индуктивных преобразователей может производиться как по дифференциальной, так и по мостовой схемам.
Включение цилиндрических реверсивных индуктивных преобразователей может производиться как по дифференциальной, так и по мостовой схемам.
Индуктивные преобразователи нашли применение в датчиках уровня, давления, датчиках перемещения рейки топливных насосов дизеля.
Общим недостатком их является гальваническая связь источника и нагрузки.








