 2020-09-24
2020-09-24 127
127Полюсное управление (управление по цепи возбуждения) возможно для ИД с обмоткой независимого возбуждения (рис. 5.20 а).
Для ограничения тока якоря I Я в цепь якоря подается пониженное значение напряжения U Я = const.
Получим выражение для статических характеристик ИД.
Магнитный поток Ф пропорционален напряжению управления U y, поэтому запишем:
Ф = kU y = k α U yн. (5.49)
Связь между w и М уже установлена в (5.41). Для случая полюсного управления надо заменить U у на U я и подставить Ф из (5.49). Получаем:
 (5.50)
(5.50)
Частота вращения идеального холостого хода при a = 1, М = 0
 (5.51)
(5.51)
Номинальный пусковой момент при a = 1, w = 0
J
 (5.52)
(5.52)
Вновь вводим относительные единицы ν и m. Из (5.13) получаем
 (5.53)
(5.53)
Уравнение (5.16) определяет семейство механических и регулировочных характеристик ИД с полюсным управлением (рис. 5.25). Вспомним: механические характеристики – это зависимости ν(m) при фиксированных значениях a = const. Регулировочные характеристики – это зависимости ν(a) при фиксированных
 |
значениях момента m = m c = const.
Из рис. 5.25 и выражения (5.53) вытекают следующие особенности механических характеристик:
– механические характеристики устойчивы и линейны, но их жесткость (наклон) зависит от коэффициента сигнала, при снижении коэффициента сигнала характеристики становятся более мягкими;
– частота вращения холостого хода обратно пропорциональна коэффициенту сигнала и при малых его значениях резко возрастает, т.е. существует опасность разноса;
– пусковой момент в относительных единицах равен коэффициенту сигнала.
Особенности регулировочных характеристик (см. рис. 5.25, б) заключаются в следующем:
– регулировочные характеристики нелинейны и при m < 0,5 неоднозначны, т.е. имеют экстремум и участки положительной и отрицательной крутизны, поэтому полюсное управление применяется при работе ИД под нагрузкой при m > 0,5;
– в режиме холостого хода (m = 0) регулировочная характеристика представляет собой гиперболу, т.е. существует опасность разноса ИД при малых значениях коэффициента сигнала;
– порог трогания ИД под нагрузкой равен относительному значению момента сопротивления на валу.
Обычно в чистом виде полюсное управление ИД не используется, а в сочетании с якорным управлением обеспечивает расширение диапазона регулирования частоты вращения wmax/wmin с 7–10 до 20–50.
Пример схемы комбинированного управления ИД приведен на рис. 5.26
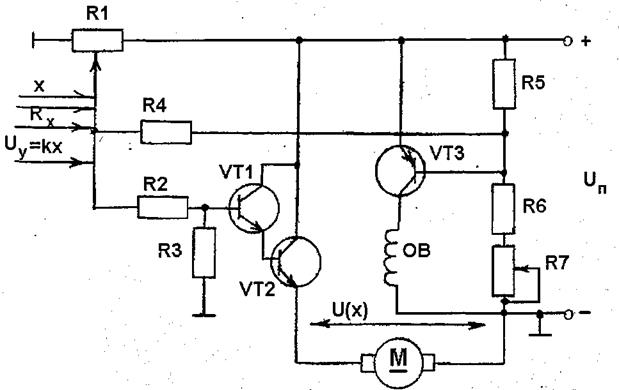
Рис. 5.26. Схема комбинированного управления исполнительным двигателем
Схема нереверсивна и работает следующим образом. Перемещение х по схеме влево движка потенциометрического задатчика R1 приводит к увеличению напряжения якоря U (x), которое передается на якорь эмиттерным повторителем на спаренных транзисторах VT1, VT2, т.е. реализуется якорное управление. Одновременно изменяется напряжение на базе транзистора VT3, в результате чего уменьшается ток возбуждения ИД (полюсное управление). В результате быстро нарастает частота вращения.
Ток возбуждения никогда не снижается до нуля, т.е. транзистор VT3 полностью не закрывается. Минимальный ток возбуждения устанавливается подстроечным резистором R7.








