 2020-10-09
2020-10-09 400
400Цель работы:
- систематизация и обобщение знаний 3-х разделов дисциплины АУЛ «Принципы построения автоматических систем», «Устойчивость и качество работы систем автоматики», «Локомотивные системы автоматического управления, регулирования и защиты»;
- уточнение сведений, касающихся принципа построения и работы автоматических систем управления пассажирских локомотивов.
Краткие теоретические сведения.
Автоматические системы управления пассажирскими поездами могут быть как централизованные, так и автономные. Ниже рассмотрены принципы построения автономных автоматических систем управления пассажирскими поездами, так как дополнение их блоками приёма информации решает задачу построения централизованных автоматических систем управления пассажирскими поездами.
Автоматические системы управления пассажирскими поездами делятся на одноконтурные и двухконтурные. Одноконтурные автоматические системы управления пассажирскими поездами осуществляют выбор позиции управления N локомотива в зависимости от рассогласования Δ t между фактическим временем хода по контрольному участку и программным. Каждой позиции управления соответствуют определённые позиции контроллера и тормозных кранов. В двухконтурных автоматических системах управления пассажирскими поездами вычисляется требуемая скорость движения в зависимости от рассогласования Δ t (первый контур), а затем в соответствии с вычисленной скоростью регулятором скорости (второй контур) выбирается позиция управления.
Автоматические системы управления пассажирскими поездами с одним контуром управления (рис. 2) состоят из объекта управления, регулятора времени хода (РВ), программного блока (ПБ), исполнительного устройства и тормозного блока (ТБ). Объект управления – поезд имеет управляемую величину t (SK) – время хода по контрольному участку пути. На поезд действует возмущающее воздействие f (t), препятствующие реализации заданного времени хода. Регулятор времени хода, состоящий из измерителя времени хода (ИУ t), органа сравнения времени хода (ОС t), устройства управления временем хода (УУ t), предназначен для выработки управляющего воздействия.
Измерительное устройство времени хода (ИУ t) поезда преобразует величину t в цифровой код в определенных точках пути SK, где K = 0, 1, 2, …. Поэтому на выходе измерительного устройства будет дискретная функция дискретного аргумента tИЗМ (SK) в то время, как на входе – непрерывная функция непрерывного аргумента t (S). При этом длина K -го контрольного участка, по которому задано время хода. Таким образом ИУ t осуществляет дискретизацию управляемой величины t по пути.
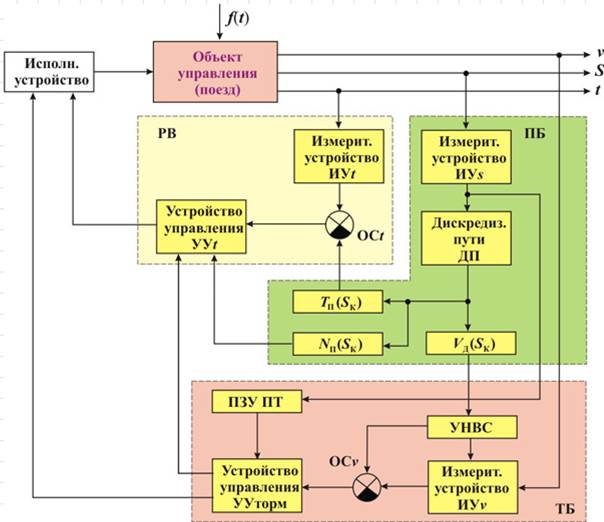
Рисунок 2
Орган сравнения времени хода реализует операцию вычитания и определяет рассогласование между измеренным значением и заданным программным временем хода
Устройство управления временем хода реализует закон управления, осуществляя преобразование в номер N позиции управления; оно выбирает номер ходовой позиции или нулевую позицию (выбег). Если номер позиции управления выбирается только в зависимости от величины рассогласования по управляемой величине, то автоматическая система управления пассажирскими поездами относиться к классу автоматических систем с управлением по отклонению. Если N определяется в зависимости от D t (SK) и f (t), то система относиться к классу автоматических систем с комбинированным управлением.
Исполнительное устройство непосредственно воздействует на цепи локомотивной автоматики, получая информацию от управляющего устройства времени хода (УУ t) или тормозного блока.
Программный блок служит для хранения программ движения поезда и состоит из измерительного устройства пути (ИУ s), дискретизатора пути (ДП) и постоянного запоминающего устройства (ПЗУ ПТ) программ движения.
Тормозной блок осуществляет прицельное торможение у платформ, уменьшение скорости по сигналам АЛС и в случае превышения поездом значения Фактической скорости движения vД. Он состоит из измерительного устройства скорости (ИУ v), устройства выбора наименьшей ограничивающей скорости (УВНС), органа сравнения скорости (ОС v), постоянного запоминающего устройства программ торможения, устройства управлением торможением (УУторм).
Устройство ИУ v осуществляет измерение скорости и преобразование её в цифровой код. Устройство выбора наименьшей ограничивающей скорости выбирает наименьшее значение скоростей, поступающих из ПЗУ и по сигналам ограничения АЛС. Выбранная скорость сравнивается с измеренной в органе скорости ОС v, где реализуется операция вычитания. Рассогласование по скорости Δ v формирует сигнал перехода с тяги на выбег и наоборот. Этот сигнал поступает в устройство управления временем хода и является для него приоритетным. В том случае когда переход на выбег не обеспечивает необходимого уменьшения скорости, УУторм формирует сигнал торможения, поступающий в исполнительное устройство. Траектория торможения задана в управляющей программе.
Помимо устройств программного блока и тормозного блока, аналогичных применяемым в одноконтурной автоматической системе управления пассажирскими поездами, содержит регулятор времени хода, отличный от используемого в одноконтурных системах, и регулятор скорости. Регулятор времени хода определяет рассогласование по времени и преобразует его в заданное значение скорости vЗ (SK), которое определяется в сумматоре скоростей как алгебраическая сумма программного значения скорости vП (SK) и D v (Dt, SK), вычисляемого в УУ t. Регулятор скорости, состоящий из измерительного устройства скорости ИУv, органа сравнения скорости ОСv, управляющего устройства скоростью УУ v, предназначен для поддержания с требуемой точностью заданного уровня скорости vЗ (SK). Измерительное устройство скорости ИУ v преобразует непрерывную функцию v (t) в её цифровой эквивалент. Орган сравнения ОС v определяет рассогласование между измеренной vизм и заданной vЗ. Управляющее устройство скорости УУ v выбирает управляющее воздействие в зависимости от Δ v.
Во ВНИКТИ были созданы аппаратные средства системы автоматического регулирования МСУ-Т, успешно выполняющие свои функции в составе комплексной микропроцессорной системы управления пассажирским тепловозом ТЭП70БС.
Система МСУ-Т содержит модули для сбора информации от дискретных, аналоговых и частотных датчиков и выдачи управляющего воздействия на исполнительные устройства, а также формирования сигналов для управления тиристорным преобразователем регулирования напряжения тягового генератора и электронным регулятором частоты вращения вала дизеля. Еще одна функция микропроцессорного блока – сохранение диагностической информации на сменной носителе.
Задание на выполнение лабораторной работы.
1. Раскрыть функциональную взаимосвязь между блоками изображенной на рис. 2 системы автоведения пассажирских поездов.
2. Привести схему пуска привода, соответствующему вышеприведенной системе управления пассажирских локомотивов.
3. Укажите основные преимущества и недостатки рассматриваемой системы.
4. Письменно дать ответы на контрольные вопросы в отчете.
Контрольные вопросы.
1. Что воплощает в себе концепция (ведущий замысел построения) автоведения поездов?
2. Чего позволяет достичь программная реализация системы?
3. Как сказывается на потребительских качествах программная реализация системы?
4. С какой целью в структуру рассматриваемой системы дополнительно входят два пульта машиниста, комплект датчиков и источников питания?








