 2020-10-10
2020-10-10 941
9411.1. Характеристики АД при номинальных напряжении и частоте.
Характерный вид механической характеристики Ω = f (M) и электромеханической характеристики Ω = f (I) приведен на рис. 1.1. Характеристика тока и момента по скорости.
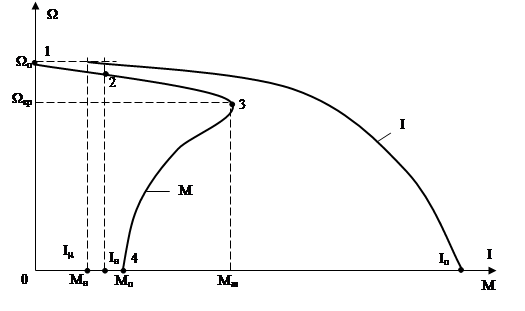 |

Рисунок 1.1. Характерный вид характеристик Ω = f (M) и Ω = f (I) для АД.
Характерные точки на характеристике момента:
1. Ω = Ωо, М = 0;
2. Ω =Ωн, М = Мн;
3. Ω = Ωк,М = Мт; Мт = 1,8 …2.8 Мн;
4. Ω = 0; М = Мп; Мп = 1.0 …1.3 Мн.
Характерные точки на характеристике тока
1. Ω = Ωо, I=Iμ = (0,3 … 0,4) Iн =Iн;
2. Ω = Ωн, I = Iн;
3. Ω = 0,5Ωо, I» (0,8 …0,9) Iн;
4. Ω = 0; I = Iп» (5 …7) Iн.
Формула связи между скольжением и скоростью
Ω = Ωо (1 – s) (1.1)
Часто пользуются величиной относительной скорости:
 тогда
тогда  (1.2)
(1.2)
Отсутствие пропорциональности между моментом двигателя и током статора во время пуска объясняется значительным снижением магнитного потока двигателя, а также уменьшением коэффициента мощности вторичной цепи при пуске.
Момент асинхронного двигателя, как и любой электрической машины, пропорционален магнитному потоку Ф и активной составляющей вторичного тока.
 , (1.3)
, (1.3)
где  - конструктивный коэффициент;
- конструктивный коэффициент;
Ψ2 – угол сдвига между ЭДС и током ротора;
 . (1.4)
. (1.4)
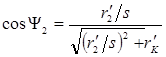
На рис. 1.2 изображена схема замещения АД для начального момента пуска (режим КЗ).
 |
Рисунок 1.2. Схема замещения АД в режиме короткого замыкания.
Как видим, пусковой ток  находится как
находится как
 ,
,
где  - сопротивления КЗ.
- сопротивления КЗ.
ЭДС  при пуске
при пуске
Е1п = U1 – I1п (r1 + jx1)» 0,5 U1
Магнитный поток Ф определяется из формулы: Е1п = 4,44Wэ · f · Фп,и оказывается примерно вдвое меньше магнитного потока в режиме номинальной нагрузки, или холостого хода.  вместо 0,8 …0,9 при номинальном режиме нагрузки.
вместо 0,8 …0,9 при номинальном режиме нагрузки.
Итак, формула момента

при пуске (t=0) даёт
 .
.
Несмотря на то, что  принят равным пятикратному току, момент Мп» Мн.
принят равным пятикратному току, момент Мп» Мн.
В случае, если рассматриваются двигатели с увеличенным сопротивлением ротора  (глубокопазные и др.), (в их обозначениях появляется буква С или П – повышенный пусковой момент), то их характеристики момента будут иметь три особенности:
(глубокопазные и др.), (в их обозначениях появляется буква С или П – повышенный пусковой момент), то их характеристики момента будут иметь три особенности:
1) С увеличением критическое скольжение пропорционально увеличивается  ;
;
2) Максимальный момент Мтах остается неизменным (Мт = const);
3) Пусковой момент увеличивается, а пусковой ток уменьшается.
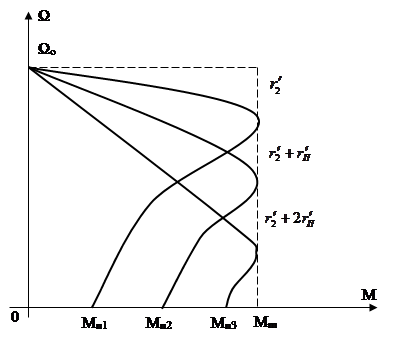 Если в цепь ротора фазного двигателя ввести сопротивление
Если в цепь ротора фазного двигателя ввести сопротивление  , то наблюдаются те же три особенности, см. рис. 1.3.
, то наблюдаются те же три особенности, см. рис. 1.3.
Рисунок 1.3. Изменение механических характеристик АД с ФР при увеличении сопротивления 
1.2. Сравнение характеристик двигателей: обычного и с повышенным
скольжением
Сравнение характеристики двигателя для обычного исполнения и с повышенным сопротивлением ротора можно провести, используя соответствующие графики.
Предполагается, что на рис.1.4 изображены двигатели одинаковой мощности и синхронной скорости Ωо.
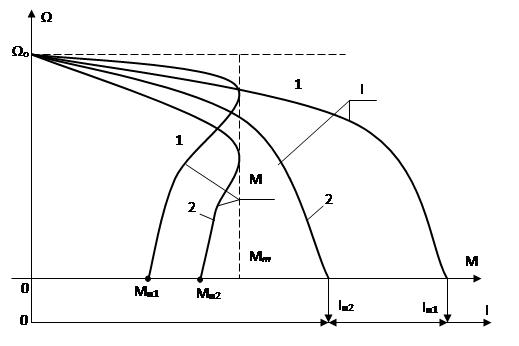 |

Рисунок 1.4. Характеристики тока I и момента М двигателей с обычным (1) и повышенным (2) сопротивлением ротора
Двигатели с повышенным сопротивлением , или при подключении r2п в цепь фазного ротора, имеют хорошие пусковые показатели: увеличенный пусковой момент Мп2 >Мп1, и уменьшенный пусковой ток Iп2 < Iп1. Такой двигатель быстрее разгоняется (сокращается время пуска) и, кроме того, за время разгона имеет меньшие пусковые токи и следовательно, уменьшенную среднюю мощность тепловыделения (что особенно важно для изоляции обмотки статора двигателя).
Однако, в режиме нагрузки при установившемся режиме, двигатель с повышенным сопротивлением (или  ) будет иметь и повышенные потери мощности как в роторе, так и в статоре.
) будет иметь и повышенные потери мощности как в роторе, так и в статоре.
Суммарные потери определяются из формулы
номинальное скольжение 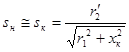 практически пропорционально
практически пропорционально  ,
,
так как  и
и  от сопротивления
от сопротивления  не зависят.
не зависят.
При продолжительном режиме работы двигатели с повышенным скольжением оказываются менее экономичными, так как у них низкий КПД и повышенный нагрев обмоток из-за увеличения потерь.
1.3. Механические характеристики АД в тормозных режимах
Режим генераторного или рекуперативного торможения (ГТ).
Возникает при подкрутке двигателя со стороны механизма, например при ускоренном спуске груза. Двигатель реверсируется и далее вращается под действием момента силы тяжести груза. Но при скорости Ω >Ωо скольжение становится отрицательным, что приводит к изменению знака момента. Момент вместо подкручивания начинает тормозить движение. На рис. 8.5 изображена рабочая точка «а» режима ГТ.
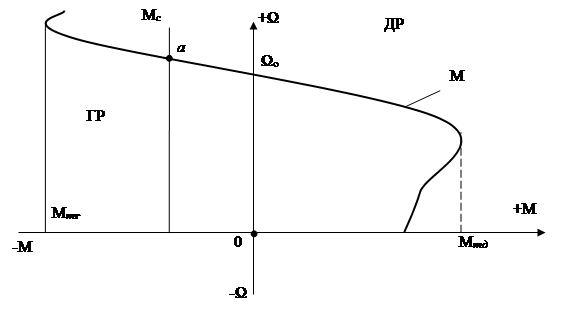 |
Рисунок 2.5.Тормозной режим в точке «а» при рекуперации энергии в сети.
В режиме генераторного торможения двигатель работает как асинхронный генератор, отдавая энергию в сеть, и потребляя реактивную мощность. Максимальный момент Мкг > Мкд.
Режим динамического торможения.
В этом режиме обмотка статора отключается от сети питания и подключается к источнику постоянного напряжения. Постоянный ток, протекая по обмотке статора создает неподвижное магнитное поле, в котором вращается ротор. Относительная скорость ротора  по существу определяет собой скольжение, то есть относительную скорость движения стержней ротора в неподвижном магнитном поле.
по существу определяет собой скольжение, то есть относительную скорость движения стержней ротора в неподвижном магнитном поле.
На рис.2.6 показан переход из режима генерального торможения в режим динамического торможения. Точка «а» занимает место точки синхронной скорости Ωо.
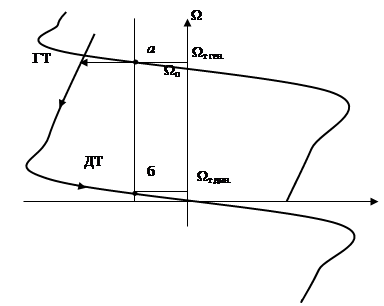
Рисунок 2.6. Переход от точки режима генераторного торможения «а» в точку динамического торможения «б».
Из графиков на рис.2.6 становится понятным название – режим динамического торможения. Действительно, если двигатель был включен на спуск груза и работал в точке «а», то в режиме ГТ осуществлялся очень быстрый спуск со скоростью Ω т ген > Ωo. При необходимости «посадки» груза на основание, чтобы его не разбить, включается режим динамического торможения, и груз «приземляется» со скоростью Ωт дин » 0, точка «б».
Схемы подключения обмотки статора на пост. напряжение и величина самого напряжения могут быть различными, в том числе, постоянное напряжение может подаваться от сети переменного тока через выпрямитель.
Режим торможения противовключением
|
|
|
 |
Рисунок 2.7. Схема реверса двигателя с КЗ ротором.
На схеме фаза «а» двигателя подключена к фазе А сети. С помощью переключателя П при положении I обеспечивается подключение «в» к «В» сети, и «с» к «С». А в положении II происходит подключение «в» к «С» сети, а «с» к «В» сети. На рис.2.8 показан переход АД в режим реверса, с использованием механических характеристик, для прямого (+М, +W) и обратного (–М, –W) направлений вращения поля.
После переключения фаз двигатель последовательно переходит с рабочей точки «а» в точку «в», где оказывается в режиме торможения противовключением (ТПВ), при скольжении, близком к s»2.0. Происходит быстрое снижение скорости до W=0 в точке «с».
При необходимости быстро затормозить поднятие груза до остановки, точка «с», нужно просто отключить двигатель от сети. При этом груз будет автоматически взят на эл. магнитный тормоз (как и при исчезновении питания).
Если двигатель не отключить от сети, то происходит разгон в обратном направлении до скорости –W0 (точка «d»). На интервалах механической характеристики «с - d» имеет место двигательный режим. Так как момент сопротивления Мс = const потенциальный (не меняет направления), то после точки «d» (при W = -W0) происходит разгон до точки «е» при скорости –W < –W0 (за счёт подкрутки со стороны груза).
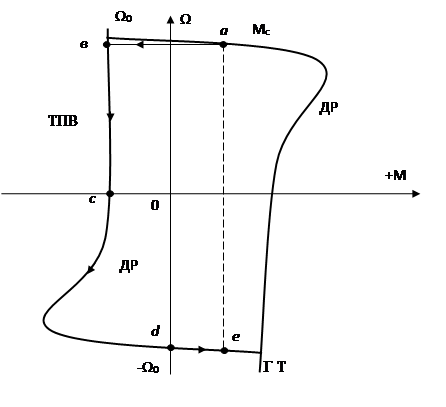
Рисунок 2.8. Переход АД из режима двигателя, точка «а», в режим ТПВ, участок «в – с», разгона в обратном направлении, участок «с – d», и далее, в режим ГТ, участок «d – е».
В точке «е» АД в режиме рекуперативного торможения (это IV-й квадрант), будет работать с постоянной скоростью, обеспечивая быстрое опускание груза.








