 2020-10-10
2020-10-10 536
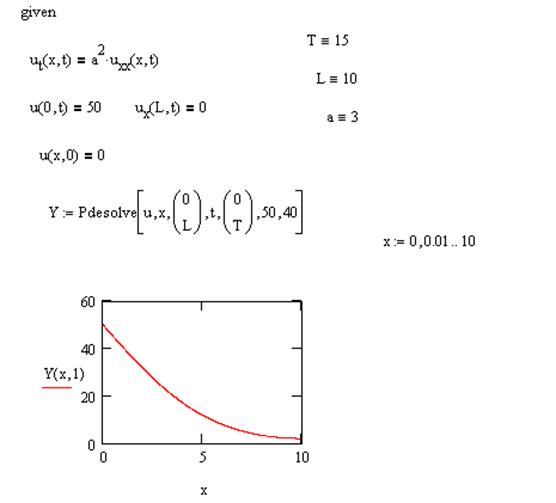
536Для решения дифференциальных уравнений в частных производных параболического типа можно построить группу решения с функцией pdesolve. Такая группа решения состоит из следующих элементов.
- Ключевое слово given
- Уравнение, которое нужно решить. Уравнение должно иметь такой вид:
 . Для ввода производных в данном случае нельзя пользоваться обычным оператором производной, а нужно пользоваться нижним индексом, как это обычно делается в литературе для записи уравнений в частных производных. При этом нижний индекс набирается не как числовой, а как буквенный (точка).
. Для ввода производных в данном случае нельзя пользоваться обычным оператором производной, а нужно пользоваться нижним индексом, как это обычно делается в литературе для записи уравнений в частных производных. При этом нижний индекс набирается не как числовой, а как буквенный (точка). - Граничные условия для функции u(x,t). Если уравнение второго порядка по x, то граничных условий должно быть два. Можно использовать как граничные условия Дирихле (u(x0,t) = w(t)), так и граничные условия Неймана (ux(x0,t) = w(t)) или их комбинацию, как в вышеприведенном примере.
- Начальное значение для неизвестной функции – u(x,0).
- функция pdsolve(u,x,xrange,t,trange,xpts,tpts). Ее аргументы имеют следующее назначение
- u – имя функции, относительно которой решается уравнение. Для системы уравнений здесь должен быть вектор имен функций (как в odesolve).
- X- имя пространственной переменной.
- Xrange – двухкомпонентный вектор, задающий начало и конец интервала изменения пространственной переменной.
- T – имя временной переменно й. Основная разница между пространственной и временной переменными в данном случае – это то, что все уравнения могут содержать только первые производные по временной переменной.
- Trange – еще один двухкомпонентный вектор. Этот вектор задает начало и конец временного интервала, на котором решается задача.
- Xpts, tpts – количество точек, разбивающих для интегрирования пространственный и временной интервалы соответственно. Эти два параметра можно не указывать, тогда количество точек будет выбрано автоматически из соображений достаточной точности. Рекомендуется задавать эти параметры во всех задачах, кроме простых, поскольку во многих случаях высокая точность вычислений теряет смысл из-за погрешности, вносимой самим методом.
Выше приведен пример решения одномерной задачи теплопроводности для одного бруска, один конец которого теплоизолирован, а ругой поддерживается при определенной температуре
6. Способы исследования статических и динамических характеристик технологических объектов
Каждый объект управления характеризуется определенными свойствами. Эти свойства должны быть учтены при создании и настройке контуров управления, причем динамические свойства объекта управления должны соответствовать динамическим параметрам выбранного контура управления. Индивидуальные свойства объекта и регулятора определяются статическими и динамическими характеристиками, которые определяются расчетным путем или эмпирически.
Статической характеристикой объекта управления называется зависимость выходного регулируемого параметра от входного (управляющего воздействия) в установившемся (статическом) состоянии.
Статические характеристики необходимы для:
· определения границы (зоны) управляемости;
· определения линейности системы. Вся теория справедлива для линейных систем. В линейной системе статическая характеристика имеет линейный вид,  - коэффициент передачи должен быть постоянным.
- коэффициент передачи должен быть постоянным.
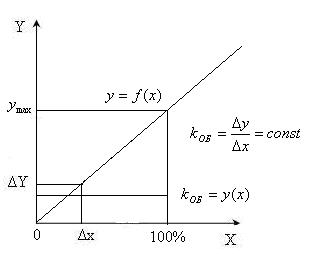
Рис 33. Статическая характеристика линейного ОУ
Реальные статические характеристики, как правило, нелинейны и коэффициент передачи не постоянен и является функцией от управляющего воздействия.
Примечание
Статическую характеристику имеют только объекты с самовыравниванием, т.е. такие объекты управления, регулируемый параметр которых после внесения возмущения может устанавливаться на новом определенном значении.
Астатические (интегральные) объекты управления статической характеристики не имеют. Примеры объектов с самовыравниванием и без самовыравнивания приведены на рисунках ниже.
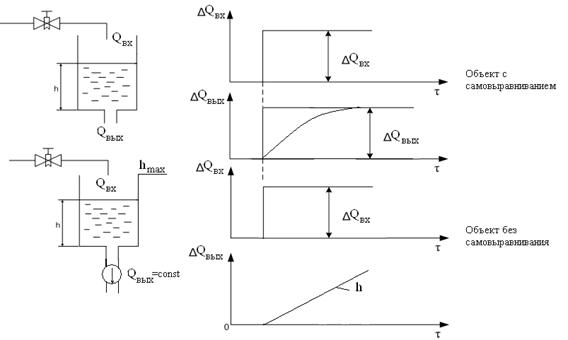
Рис 33*. Объекты с самовыравниванием и без самовыравнивания
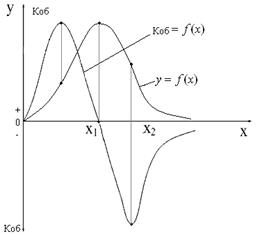
Рис 34. Статическая характеристика экстремального вида
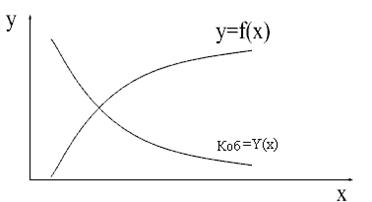
Рис 35. Статическая характеристика нелинейного объекта управления
По виду статической характеристики нужно выбрать тип регулирующих законов, которые следует применять для управления данным объектом управления.
Примечание
Для того, чтобы учесть закон изменения коэффициента передачи при изменении управляющего воздействия, необходимо при формировании структурной схемы объект управления аппроксимировать следующей структурой, представленной на рис.36.
Схема представляет собой последовательное соединение трех звеньев:
- статического звена, обычно с нелинейной характеристикой y=f(x);
- динамического инерционного звена, характеризующего инерционные свойства объекта управления;
- при  - динамического звена первого порядка, характеризующего запаздывающие свойства объекта управления.
- динамического звена первого порядка, характеризующего запаздывающие свойства объекта управления.
 Рис 36. Структурная схема нелинейной системы с двумя инерционностями To и τЗ
Рис 36. Структурная схема нелинейной системы с двумя инерционностями To и τЗ
Рис 37. Структурная схема линейной системы с двумя инерционностями при Кр=const
В реальных условиях установившегося состояния объекта управления практически никогда не существует в результате воздействия на объект управления различных технологических возмущений и случайных помех – это означает, что объект управления находиться в основном в неустановившемся режиме, а статическая характеристика выступает в виде цели, к которой стремится регулируемый параметр во времени.
Для характеристики поведения объекта управления в неустановившемся режиме используются динамические характеристики, позволяющие количественно оценить инерционность и запаздывание реального объекта управления. Эти динамические параметры определяются по динамическим характеристикам.
Динамической характеристикой называется траектория изменения регулируемого выходного параметра при стандартном изменении управляющего воздействия.
В зависимости от вида стандартного возмущения характеристики делятся на:
· Кривая разгона – это реакция системы на однократное скачкообразное возмущение. Этот тип возмущения легко реализуется и стандартизуется. Не путать кривую разгона с переходной функцией и временной характеристикой, которые рассматривают траекторию при однократном единичном ступенчатом воздействии, и использующиеся для теоретического анализа.
· Импульсная характеристика – это реакция системы или объекта исследования на импульсное возмущающее воздействие.
· Частотная характеристика – реакция объекта на гармонический возмущающий сигнал постоянной амплитуды и переменный по частоте.
Вопрос: чем отличаются АФЧХ двух инерционных звеньев с различными величинами постоянных времени?
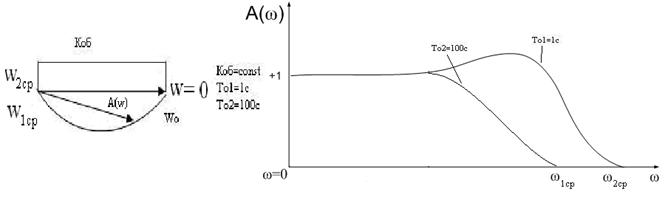
Рис 38. АФЧХ инерционного звена первого порядка для Tо=1с;То=100с
· Передаточная функция объекта, которая является формализованным алгебраическим представлением дифференциального уравнения, определяющим динамику объекта, также является динамической характеристикой, так как для инерционного объекта управления, имеющего передаточную функцию  , уравнение будет иметь вид:
, уравнение будет иметь вид:
Так как все виды динамических характеристик отображают одни и те же свойства исследуемого объекта, то они могут перестраиваться из одного типа в другой, и целью эксперимента является изучение этого перехода (см. лабораторный практикум).
По виду динамических характеристик объекты делятся на следующие типы:
· объекты с самовыравниванием;
· объект без самовыравнивания;
· объект с самовыравниванием и без самовыравнивания и с запаздыванием;
Примерно 95% являются объектами с самовыравниванием.
Свойство объекта переходить в новое установившееся состояние при нанесении однократного скачкообразного возмущения называется самовыравниванием.
В случае наличия объектов без самовыравнивания, называемых астатическими, управление такими объектами требует применения определенных мер и правильного выбора закона регулирования, т.к. любое остаточное отклонение приведет к аварийному режиму.
Кривые разгона и динамические параметры таких объектов приведены на
рис. 39 а, б, в.
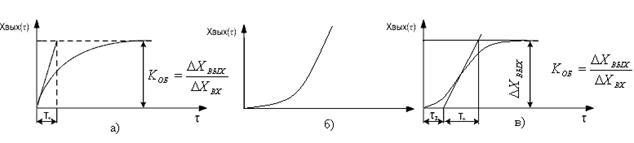
Рис 39. Кривые разгона: а) объекта с самовыравниванием; б)объекта без самовыравнивания; в) объекта с запаздыванием и самовыравниванием
|
1. Александров, В.А. Моделирование технологических процессов лесных машин: Учебник / В.А. Александров, А.В. Александров. - СПб.: Лань, 2016. - 368 c.
2. Александров, В.А. Моделирование технологических процессов лесных машин: Учебник / В.А. Александров. - СПб.: Лань, 2016. - 368 c.
3. Андреев, С.М. Разработка и моделирование несложных систем автоматизации с учетом специфики технологических процессов: Учебное пособие / С.М. Андреев. - М.: Academia, 2017. - 36 c.
4. Андреев, С.М. Разработка и компьютерное моделирование элементов систем автоматизации с учетом специфики технологических процессов: Учебник / С.М. Андреев. - М.: Academia, 2017. - 36 c.
5. Гумеров, А.М. Математическое моделирование химико-технологических процессов: Учебное пособие / А.М. Гумеров. - СПб.: Лань, 2014. - 176 c.
6. Делле, Седие, Э. Моделирование технологических процессов лесных машин: Учебник / Седие Э. Делле. - СПб.: Лань, 2016. - 368 c.
7. Ефремов, Г.И. Моделирование химико-технологических процессов: Учебник / Г.И. Ефремов. - М.: Инфра-М, 2018. - 132 c.
8. Закгейм, А.Ю. Общая химическая технология: Введение в моделирование химико-технологических процессов: Учебное пособие / А.Ю. Закгейм. - М.: Унив. книга, Логос, 2012. - 304 c.
9. Кузьмин, В.В. Математическое моделирование технологических процессов сборки и механической обработки изделий машиностроения:. / В.В. Кузьмин. - М.: Высшая школа, 2008. - 279 c.
10. Самойлов, Н.А. Примеры и задачи по курсу "Математическое моделирование химико-технологических процессов": Учебное пособие / Н.А. Самойлов. - СПб.: Лань, 2013. - 176 c.
11. Федоткин, И.М. Математическое моделирование технологических процессов / И.М. Федоткин. - М.: КД Либроком, 2018. - 416 c.
12. Хазанов, Е.Е. Математическое моделирование химико-технологических процессов: Учебное пособие / Е.Е. Хазанов, В.В. Гордеев, В.Е. Хазанов. - СПб.: Лань, 2014. - 176 c.
13. Цорн, А.Я. Примеры и задачи по курсу „Математическое моделирование химико-технологических процессов: Учебное пособие / А.Я. Цорн. - СПб.: Лань, 2013. - 176 c.








