 2020-10-10
2020-10-10 249
249Лекция 3. Фрикционные передачи. Передачи с гибкой связью. Особенности конструкции. Кинематический и силовой расчет. Схемы ременных передач. Ремни и шкивы. Эксплуатационная прочность и выносливость.
Фрикционные передачи, в которых в качестве гибкого органа применяются ремни называются ременными передачи.
Ременная передача состоит из ведущего и ведомого шкивов и ремня, надетого на шкивы с натяжением и передающего окружную силу с помощью трения (рисунок 2.4).
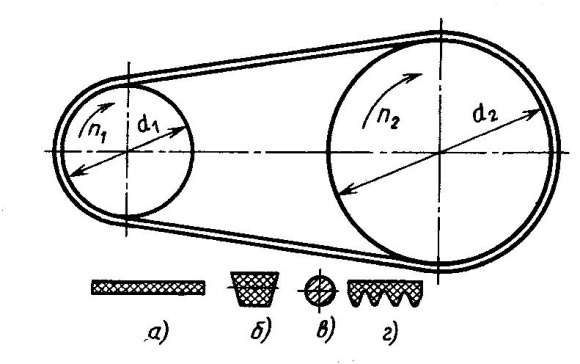
Рисунок 2.4 – Схема ременной передачи: а) - плоские ремни; б) – клиновые ремни; в) – круглые ремни; д) – поликлиновые ремни
Ременные передачи возможны с двумя или несколькими ведомыми шкивамя. Натяжение ремня производится натяжными устройства различного типа: по салазкам (рисунок 2.5, а), когда натяжение обеспечивается перемещением одного из шкивов; поворотом качающейся плиты (рисунок 2.5, б) и др.
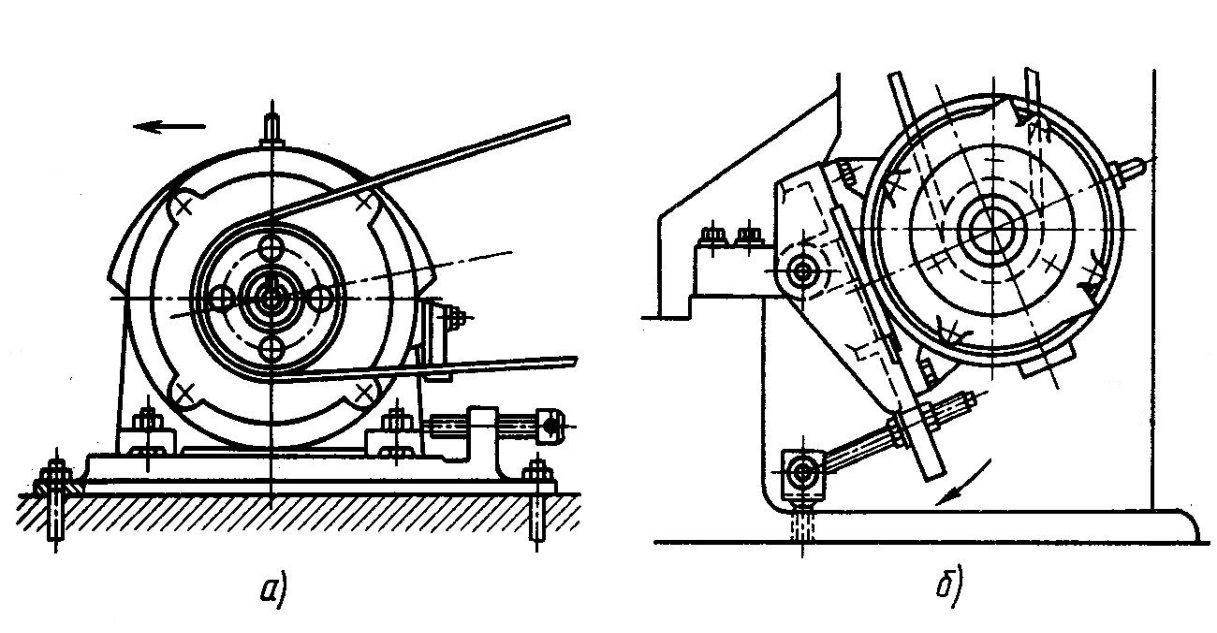
Рисунок 2.5 – Устройства натяжения ремня
По взаимному расположению валов и направлению их вращения ременные передачи могут быть открытыми (рисунок 2.6, а), перекрестными (рисунок 2.6, б) и полуперекрестными (рисунок 2.6., в).
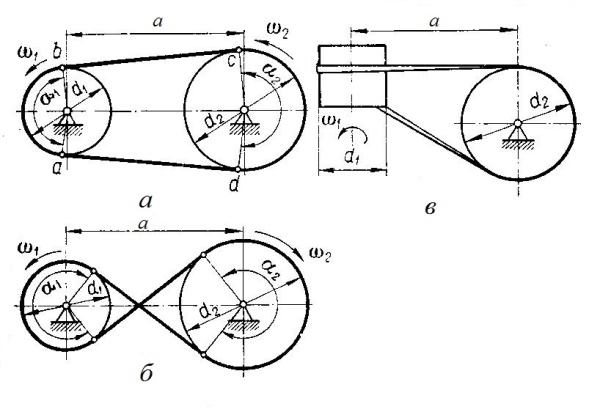
Рисунок 2.6 – Схемы ременных передач
По конструкции ремни бывают плоскими (рисунок 2.4, а), клиновые (рисунок 2.4, б), круглые (рисунок 2.4, в) и поликлиновые (рисунок 2.4, г). В ряде случаев применяют ремни, в которых передача движения осуществляется зацеплением с помощью зубчатого ремня.
Ремни бывают сшивные и бесшовные. Бесшовные (бесконечные замкнутые) ремни являются наиболее пригодными для работы. Клиновые и поликлиновые ремни изготавливаются только бесшовными. Плоские сшивные ремни соединяются сшивкой, склейкой и металлическими соединениями (рисунок 2.7).
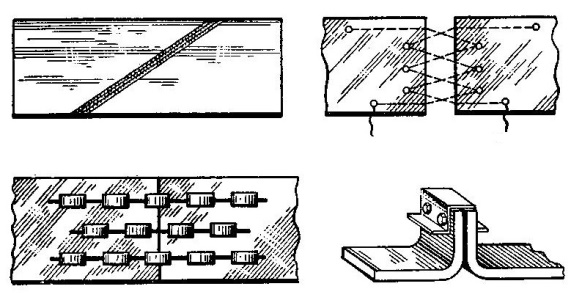
Рисунок 2.7. – Способы сшивки ремней
Клиновой ремень для передач общего назначения (рисунок 2.8) состоит из корд тканевого прорезиненного слоя 1, работающего на растяжение, резинового или резинотканевого слоя 2, работающего на сжатие и обертки 3 в виде нескольких слоев прорезиненной ткани, намотанной диагонально.
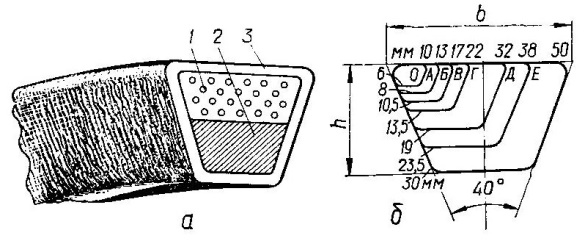
Рисунок 2.8 – Клиновой ремень
Длина ремней и размер поперечного сечения стандартизованы.
Зубчатые бесконечные плоские ремни имеют выступы на внутренней поверхности
(рисунок 2.9). Они изготавливаются из резины или полиуретанового каучука, армированных стальными или стекловолоконными тросами.
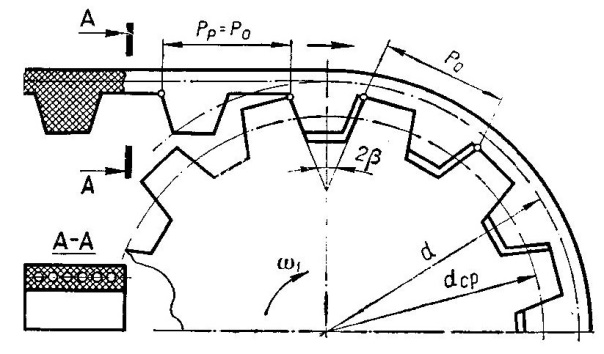
Рисунок 2.9 – Зацепление зубчатого ремня со шкивом.
Шкивы выполняют из чугуна, легких сплавов, и пластмасс. Форма обода шкива зависит от профиля ремня (рисунок 2.10).
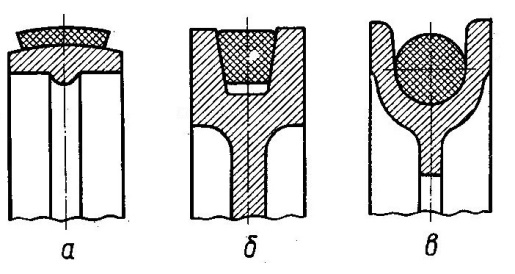
Рисунок 2.10 – Форма ободов шкивов для ремней разных профилей: а) – плоского; б) – клинового;
в) - круглого
Профили канавок шкивов для клиновых ремней стандартизованы.
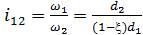
Кинематические характеристики ременной передачи характеризуются передаточной функцией, которая отражена передаточным отношением  и предопределяет величину передаточного числа u 21
и предопределяет величину передаточного числа u 21
 , (2.5)
, (2.5)
где  и
и  – угловые скорости шкивов;
– угловые скорости шкивов;  и
и  – диаметры шкивов ведущего и ведомого соответственно.
– диаметры шкивов ведущего и ведомого соответственно.
Величина передаточного числа u 21 устанавливается по нормативным признакам с учетом документальных рекомендаций по размерам шкивов
u 21=  /
/  (2.6)
(2.6)
Окружные скорости на ведущем и ведомом звеньях равны соответственно
 . (2.7)
. (2.7)
Однако, в ременных передачах ведущие и ведомые ветви гибкого звена при работе имеют различное натяжение (рисунок 2.11).
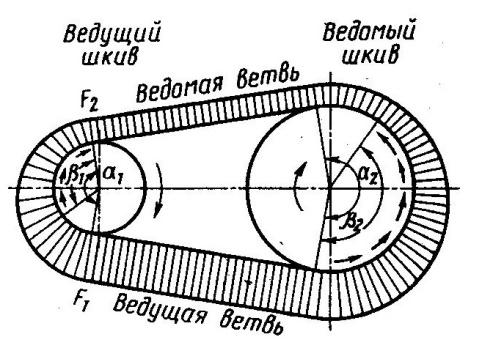
Рисунок 2.11 – Скольжение в ременной передаче
Неравенство натяжений приводит к упругому скольжению на шкивах и неравенству окружных скоростей  и
и  , а передаточное число u 21 при работе имеет отклонение от заданной величины. Величина скольжения оценивается коэффициентом скольжения x
, а передаточное число u 21 при работе имеет отклонение от заданной величины. Величина скольжения оценивается коэффициентом скольжения x
x=  , (2.8)
, (2.8)
следовательно,  , откуда
, откуда
 . (2.9)
. (2.9)
Кривые скольжения получают экспериментально: при постоянном натяжении ремня F0 постепенно повышают полезную нагрузку Ft и измеряют скольжение x.
Начальное натяжение ремня F0 выбирают по условиям, при котором ремень мог бы передавать полезную нагрузку, сохраняя натяжение и долговечность в течение заданного времени.
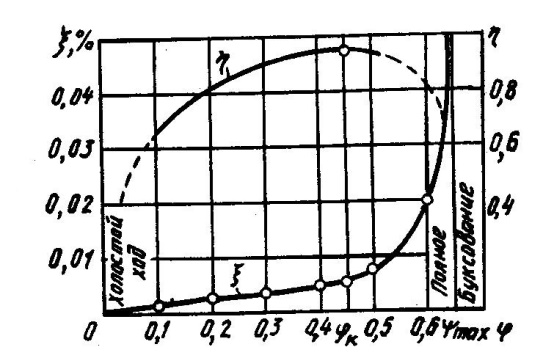
Рисунок 2.12 – Кривые скольжения и КПД
Кривые скольжения и КПД показывают, что оптимальная нагрузка ременных передач лежит в зоне критических значений коэффициента тяги j
j = 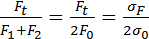 , (2.10)
, (2.10)
где  и
и  – натяжение ведущей и ведомой ветвей ремня
– натяжение ведущей и ведомой ветвей ремня
Окружная сила на шкивах или передаваемая нагрузка ремня, Н, с учетом коэффициента динамичности нагрузки KF при заданных режимах работы устанавливается формулой
 =
=  , (2.11)
, (2.11)
где Т – момент, Н∙м, на шкиве диаметром d, м; Р – передаваемая мощность, кВт; KF – коэффициент динамичности (KF= 1,0…1,6).
Напряжения sFt от передаваемой окружной силы устанавливают по формуле
sFt =  , (2.12)
, (2.12)
где А - площадь сечения ремня, мм2.
Значение начальных напряжений  =
=  . Для плоских и клиновых ремней
. Для плоских и клиновых ремней
 МПа (2.13)
МПа (2.13)
Центробежная сила  вызывает напряжение растяжения
вызывает напряжение растяжения  , МПа, в ремне
, МПа, в ремне
 , (2.14)
, (2.14)
где  – скорость ремня, м/с;
– скорость ремня, м/с;  – плотность материала ремня, кг/м3.
– плотность материала ремня, кг/м3.
Напряжение изгиба  ремня толщиной d на шкиве диаметром D и модуле упругости Е
ремня толщиной d на шкиве диаметром D и модуле упругости Е
 . (2.15)
. (2.15)
Суммарные напряжения в ремне (рисунок 2.13):
- в ведущей ветви
s =  ; (2.16)
; (2.16)
- в ведомой ветви (минимальные напряжения)
smin =  ; (2.17)
; (2.17)
- максимальные напряжения на дуге покоя ведущего малого шкива
smax =  ; (2.18)
; (2.18)
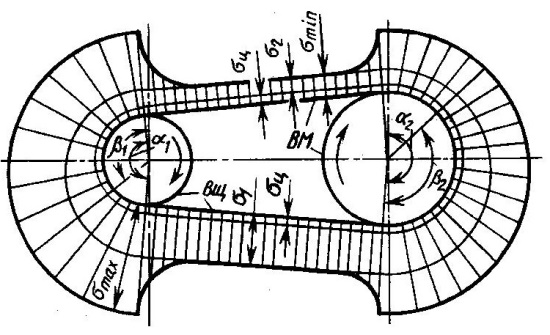
Рисунок 2.13 – Эпюра суммарных напряжений
Выражение (2.18) используют в расчетах на долговечность, заменив при этом smax на предельное напряжение по выносливости на основе кривой усталости Велера.
Допускаемое напряжение для ремней нормальных и узких сечений в реальных условиях эксплуатации
 , (2.19)
, (2.19)
где  – коэффициент влияния угла обхвата;
– коэффициент влияния угла обхвата;  - коэффициент режима работы;
- коэффициент режима работы;  – напряжение от передаваемой нагрузки, полученное по напряжению растяжения ведущей ветви ремня
– напряжение от передаваемой нагрузки, полученное по напряжению растяжения ведущей ветви ремня  на основании условия сцепления по Эйлеру.
на основании условия сцепления по Эйлеру.
Мощность,которую может передать один ремень в реальных условиях устанавли-вают по формуле
 (2.20)
(2.20)
где  – коэффициент длины ремня;
– коэффициент длины ремня;  – коэффициент передаточного числа;
– коэффициент передаточного числа;  – базовая величина мощность, установленная нормативными документами.
– базовая величина мощность, установленная нормативными документами.
Необходимое количество ремней z, которое необходимо для передачи мощности 
z =  , (2.21)
, (2.21)
где  – коэффициент, учитывающий неравномерное распределение нагрузки между ремнями.
– коэффициент, учитывающий неравномерное распределение нагрузки между ремнями.
Сила предварительного натяжения ремня F 0 зависит от мощности на ведущем шкиве  , кВт, окружной скорости
, кВт, окружной скорости  ; коэффициентов угла обхвата
; коэффициентов угла обхвата  и режима , а также массы одного метра длины ремня qm, кг и равна:
и режима , а также массы одного метра длины ремня qm, кг и равна:
- для клинового ремня
F 0 =  (2.22)
(2.22)
- для поликлинового ремня
F 0=  (2.23)
(2.23)
Сила, действующая на вал под шкивом Q, Н
Q =2 F 0× z ×sin(a1/2) (2.24)








