 2020-10-10
2020-10-10 998
998План
5.1 Принципы обработки измерений
5.2 Начальные сведения из теории ошибок
5.3 Элементы техники вычислений
5.3.1 Точные и приближенные числа
5.3.2 Система единиц для измерения углов
5.1 Принципы обработки измерений
Измерения являются важной составной частью геодезических работ, именно из измерений получают качественную информацию о различных объектах, подлежащих изучению. Геодезистам приходится изучать длины линий, горизонтальные и вертикальные углы, превышения между точками местности, температуру воздуха, ускорение свободного падения, интервалы времени и многое другое. Результаты измерений могут использоваться как непосредственно, так и как промежуточные величины для вычисления таких характеристик объекта, которые либо вообще нельзя измерить, либо их измерение требует слишком больших затрат времени и средств.
С точки зрения теории обработки измерений все измерения нужно разделить на необходимые и избыточные. Если количество неизвестных величин равно t, а количество измерений равно n, причем n>t, то t – является необходимым, а (n - t) – избыточным.
Все измерения сопровождаются ошибками и главная задача обработки измерений – устранение противоречий между результатами измерений, содержащими ошибки, и математической моделью, включающей численные значения измеряемых величин.
5.2 Начальные сведения из теории ошибок
По своей природе ошибки бывают грубые, систематические и случайные.
Грубые ошибки являются результатом промахов и просчетов. Их можно избежать при внимательном и аккуратном отношении к работе и организации надежного полевого контроля измерений. В теории ошибок грубые ошибки не изучаются.
Систематические ошибки имеют определенный источник, направление и величину. Если источник систематической ошибки обнаружен и изучен, то можно получить формулу влияния этой ошибки на результат измерения и затем ввести в него поправку; это исключит влияние систематической ошибки. Пока источник систематической ошибки не найден, приходится считать ее случайной, ухудшающей качество измерений.
Случайные ошибки измерений обусловлены точностью способа измерений, точностью измерительного прибора, квалификацией исполнителя и влиянием внешних условий.
Теория ошибок занимается в основном изучением случайных ошибок.
Случайная истинная ошибка измерения D - это разность между измеренным значением величины l и ее истинным значением х:
D = l – х. (5.1)
Свойства случайных ошибок:
а) при данных условиях измерений абсолютные значения случайных ошибок не превосходят некоторого предела; если какая-либо ошибка выходит за этот предел, то считается грубой;
б) положительные и отрицательные ошибки равновозможны;
в) среднее арифметическое случайных ошибок стремится к нулю при неограниченном возрастании числа измерений:
 (5.2)
(5.2)
г) малые по абсолютной величине случайные ошибки встречаются чаще, чем большие.
Средняя квадратичная ошибка одного измерения - СКО
Обозначается буквой m и вычисляется по формуле Гаусса:
 , (5.3)
, (5.3)
где  , n – количество измерений одной величины.
, n – количество измерений одной величины.
СКО очень чувствительна к большим по абсолютной величине ошибкам, т.к. каждая ошибка возводится в квадрат.
Доказано, что уже при n = 8, значение m получается достаточно надежным.
Предельная ошибка ряда измерений обозначается Dпред.; она обычно принимается равной 3m. Считается, что из тысячи измерений только 3 ошибки могут достичь или немного превосходить значение Dпред = 3m.
Отношение mx/x называется средней квадратичной относительной ошибкой; для некоторых видов измерений относительная ошибка более наглядна, чем m. Относительная ошибка выражается дробью с числителем, равным 1, например,  .
.
Арифметическая середина
Пусть имеется n измерений одной величины х, то есть
 (5.4)
(5.4)
Сложим эти равенства, суммарное уравнение разделим на n и получим:
 . (5.5)
. (5.5)
Величина  называется арифметической серединой.
называется арифметической серединой.
 (5.6)
(5.6)
 .
.
Это означает, что при неограниченном возрастании количества измерений простая арифметическая середина стремится к истинному значению измеряемой величины, а при ограниченном количестве измерений хо является наиболее надежным и достоверным значением измеряемой величины.
 , (5.7)
, (5.7)
т.е. средняя квадратичная ошибка арифметической середины в корень из n раз меньше ошибки одного измерения.
Веса измерений
Измерения бывают равноточными и неравноточными. Например, один и тот же угол можно измерить точным или техническим теодолитом и результаты таких измерений будут неравноточными. Или один и тот же угол измерить разным количеством приемов, результаты тоже будут неравноточными. Понятно, что СКО неравноточных измерений будут неодинаковы. Из опыта известно, что измерение, выполненное с большей точностью (с меньшей ошибкой), заслуживает большего доверия.
Вес измерения – это условное число, характеризующее надежность измерения, степень его доверия, обозначается буквой р.
 , (5.8)
, (5.8)
где с – в общем случае произвольное положительное число.
В случае равноточных измерений, когда веса всех измерений одинаковы и равны единице,
 . (5.9)
. (5.9)
5.3 Элементы техники вычислений
5.3.1 Точные и приближенные числа
Точные числа получаются при счете отдельных предметов и понятий. (45 шагов, 27 шариков); масштабные коэффициенты (1м = 100см = 1000мм).
Приближенные числа в геодезии получают, как правило, из измерений; считается, что записанное приближенное число ошибочно не более чем на половину единицы последнего разряда: 2,145 ошибочно на 0,0005, 2145 ошибочно на 0,5 и т.д.
Округление приближенных чисел:
- если первая отбрасываемая цифра больше 5 или 5 с последующими цифрами не равными 0, то последняя оставляемая цифра увеличивается на единицу (2,461»2,5, 2,4523»2,5);
- если первая отбрасываемая цифра меньше 5, то последняя оставляемая цифра не изменяется (2,441»2,4).
- если первая отбрасываемая цифра есть 5 и за ней либо нет цифры, либо есть одни нули, то последняя оставляемая цифра округляется до четной (2,55»2,6, 2,65000»2,6).
5.3.2 Системы единиц для измерения углов:
а) Градусная система. Градус – это 1/90 часть прямого угла; минута – 1/60 часть градуса; секунда – 1/60 часть минуты; 1° = 60' = 3600''.
б) Радианная система.
Радиан – это центральный угол, длина дуги которого равна радиусу окружности. Полный угол в 360° содержит 2p радианов.
Переход от радианной системы к градусной и обратно:
в ° = bрад×r°; bрад = b°/r°;
в ' = bрад×r'; bрад = b'/r';
в '' = bрад×r''; bрад = b''/r'';
Значения переходного коэффициента r:
r °=57,29578°;
r '=3437,747';
r ''=206264,8'';
в) Градовая система. Град – это 1/100 часть прямого угла;
сантиград – это 1/100 часть града;
сантисантиград – это 1/100 часть сантиграда;
1 град = 100 с. = 10000 сс.
Существуют еще часовая система измерения углов, система делений угломера и некоторые другие.
При нахождении тригонометрических функций угла нужно соблюдать соответствие между значением угла и количеством значащих цифр в значении функции:
- угол задан до целых минут - 4-5 значащих цифр;
- угол задан до десятых долей минуты - 5-6 значащих цифр;
- угол задан до целых секунд - 6 значащих цифр;
- угол задан до десятых долей секунды - 7 значащих цифр.
Лекция 6
Метод проекций
План
6.1 Центральная проекция
6.2 Ортогональная проекция
6.4 Расчет искажений при замене участка сферы плоскостью
6. 4.1 Искажение расстояний
6. 4.2 Искажение высот точек
Чтобы изобразить объемный предмет на плоском чертеже, применяют метод проекций. К простейшим проекциям относятся центральная и ортогональная проекции.
6.1 Центральная проекция
При центральной проекции (рисунок 6.1, а) проектирование выполняют линиями, исходящими из одной точки, которая называется центром проекции. Пусть требуется получить центральную проекцию четырехугольника АВСD на плоскость проекции р; центр проекции – точка S.
а) б)
Рисунок 6.1 – Центральная и ортогональная проекции
Проведем линии проектирования до пересечения с плоскостью проекции, получим точки a, b, c, d, являющиеся проекциями точек A, B, C, D. Плоскость проекции и объект могут располагаться по разные стороны от центра проекции; так при фотографировании центром проекции является оптический центр объектива, а плоскость проекции – фотопластинка или фотопленка.
6.2 Ортогональная проекция
При ортогональной проекции линии проектирования перпендикулярны плоскости проекции. Проведем через точки A, B, C, D линии, перпендикулярные плоскости проекции р; в пересечении их с плоскостью р получим ортогональные проекции a, b, с, d соответствующих точек (рисунок 6.1, б).
 Чтобы изобразить на бумаге участок земной поверхности, нужно выполнить две операции: сначала спроектировать все точки участка на поверхность относимости (на поверхность эллипсоида вращения или на поверхность сферы) и затем изобразить поверхность относимости на плоскости. Если участок местности небольшой, то соответствующий ему
Чтобы изобразить на бумаге участок земной поверхности, нужно выполнить две операции: сначала спроектировать все точки участка на поверхность относимости (на поверхность эллипсоида вращения или на поверхность сферы) и затем изобразить поверхность относимости на плоскости. Если участок местности небольшой, то соответствующий ему
участок сферы или поверхности эллипсоида можно заменить плоскостью и считать, что проектирование выполняется сразу на плоскость.
При проектировании отдельных точек и целых участков земной поверхности на поверхность относимости применяется горизонтальная проекция, в которой проектирование выполняют отвесными линиями.
Рисунок 6.2 – Горизонтальная проекция
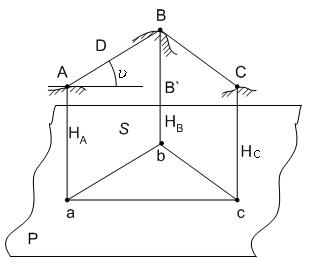
Пусть точки А, В, С находятся на поверхности Земли (рисунок 6.2). Спроектируем их на поверхность относимости и получим их горизонтальные проекции – точки a, b, c.
Линия ab называется горизонтальной проекцией или горизонтальным проложением линии местности АВ и обозначается буквой S. Угол между линией АВ и ее горизонтальной проекцией АВ` называется углом наклона и обозначается ν.
Расстояния Аа, Вb, Cc от точек местности до их горизонтальных проекций называются высотами или альтитудами точек и обозначается Н (НА, НВ, Нс); отметка точки – это численное значение ее высоты. Разность отметок двух точек называется превышением одной точки относительно другой и обозначается буквой h:
hAB = HB - HA (6.1)
6.4 Расчет искажений при замене участка сферы плоскостью
6.4.1 Искажение расстояний
Небольшой участок сферической поверхности при определенных условиях можно принять за плоскость.
Применение модели плоской поверхности при решении геодезических задач возможно лишь для небольших участков поверхности Земли, когда искажения, вызванные заменой поверхности сферы или эллипсоида плоскостью, невелики и могут быть вычислены по простым формулам. Небольшую часть сферы (эллипсоида), отличающуюся от плоскости на величину, меньшую ошибок измерений, можно считать плоской.
Рассчитаем, какое искажение получит дуга окружности, если заменить ее отрезком касательной к этой дуге (рисунок 6.3).
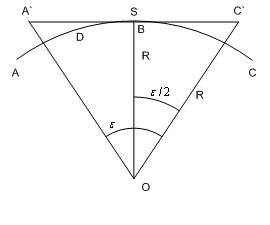 О – центр окружности, дуга АВС радиусом R стягивает центральный угол
О – центр окружности, дуга АВС радиусом R стягивает центральный угол  .
.
Проведем касательную через середину дуги в точке В и, продолжив радиусы ОА и ОС до пересечения с касательной, получим точки А` и С`.
Пусть дуга АВС имеет длину D, а отрезок касательной А`С` – длину S. Известно, что для окружности D = R  , причем угол должен быть выражен в
, причем угол должен быть выражен в
радианах.
Рисунок 6.3 – Замена сферы плоскостью
Из  имеем
имеем 
 (6.2)
(6.2)
Разность  обозначим через
обозначим через  и напишем:
и напишем:
 (6.3)
(6.3)
 - разложение в ряд
- разложение в ряд
 (6.4)
(6.4)
 , но
, но 
 . (6.5)
. (6.5)
Отношение  называется относительным искажением длины дуги при замене её отрезком касательной, оно будет равно
называется относительным искажением длины дуги при замене её отрезком касательной, оно будет равно
 . (6.6)
. (6.6)
Подсчитаем конкретные значения относительного искажения для разных длин дуги D (R = 6400 км):
D = 20 км, ΔD/D = 1/ 1 218000,
D = 30 км, ΔD/D = 1/ 541 000, и т.д.
Достигнутая точность измерения расстояний пока не превышает 1/1000000, поэтому при геодезических работах любой точности участок сферы 20х20 км можно считать плоским. При работах пониженной точности размеры участка сферы, принимаемого за плоскость, можно увеличить.
6.4.2 Искажение высот точек
Если заменить небольшой участок сферы касательной плоскостью, то будут искажены не только длины линий, но и отметки точек. Изменения отметок точек симметричны относительно точки В и зависят от удаления от этой точки.
Обозначим отрезок ВС`, равный половине отрезка А`С`, через S. Отметка точки С`, находящейся на плоскости, отличается от отметки точки С, лежащей на сфере, на величину отрезка СС` = р.
Из треугольника ОВС` следует:
 , откуда получаем
, откуда получаем
 , (6.7)
, (6.7)
р намного меньше величины 2R, поэтому отбросив ее, мы допустим несущественную ошибку. Таким образом,
 . (6.8)
. (6.8)
Влияние кривизны Земли на отметки точек нужно учитывать при любых расстояниях между точками; например, при S = 10 км р = 7,8 м и при S = 100 м р = 0,8 мм.
Лекция 7
Линейно-угловой ход
План
7.1 Классификация линейно-угловых ходов
7.2 Вычисление координат пунктов разомкнутого теодолитного хода
7.3 Вычисление координат пунктов замкнутого теодолитного хода
7.4 Привязка линейно-угловых ходов
7.1 Классификация линейно-угловых ходов
Для определения координат нескольких точек можно применить различные способы; наиболее распространенными из них являются линейно-угловой ход, система линейно-угловых ходов, триангуляция, трилатерация и некоторые др.
Линейно-угловой ход представляет собой последовательность полярных засечек, в которой измеряются горизонтальные углы и расстояния между соседними точками (рисунок 7.1).
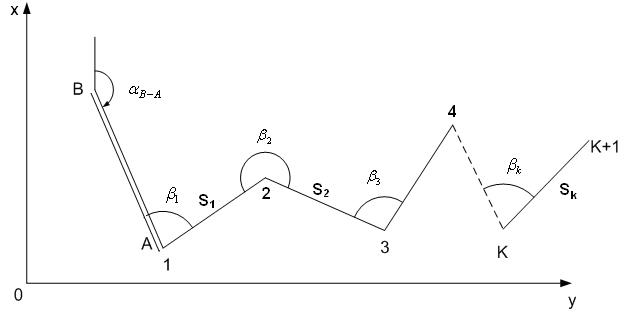
Рисунок 7.1 - Схема линейно-угловых ходов
Исходными данными в линейно-угловом ходе являются координаты XA, YA пункта А и дирекционный угол  линии ВА, который называется начальным исходным дирекционным углом; этот угол может задаваться неявно через координаты пункта В.
линии ВА, который называется начальным исходным дирекционным углом; этот угол может задаваться неявно через координаты пункта В.
Измеряемые величины – это горизонтальные углы b1, b2, b3,…,bk и расстояния s1, s2, s3,…, sk. Известны также ошибки измерения углов mβ и относительная ошибка измерения расстояний ms / S = 1/ Т.
Дирекционные углы сторон хода вычисляют последовательно по формулам передачи дирекционного угла через угол поворота:
для левых углов  , (7.1)
, (7.1)
для правых углов  . (7.2)
. (7.2)
Для хода на рисунке имеем:
α 1-2 = αВА + β1 - 180° (7.3)
α 2-3 = α1-2 + β2 - 180° (7.4)
и т.д.
Координаты пунктов хода получают из решения прямой геодезической задачи сначала от пункта А к пункту 2, затем от пункта 2 к пункту 3 и т.д., до конца хода.
На практике применяют ходы, в которых предусматривается контроль измерений.
Линейно-угловые ходы подразделяют на следующие виды:
- разомкнутый ход: исходные пункты с известными координатами и исходные дирекционные углы есть в начале и конце хода.
- замкнутый линейно-угловой ход – начальный и конечный пункты хода совмещены; один пункт хода называется исходным пунктом и имеет известные координаты; на этом пункте должно быть исходное направление с известным дирекционным углом, и измеряется угол между этим направлением и направлением на второй пункт хода.
- висячий линейно-угловой ход имеет исходный пункт с известными координатами и исходный дирекционный угол только в начале хода.
- свободный линейно-угловой ход не имеет исходных пунктов и исходных дирекционных углов ни в начале хода, ни в конце хода.
По точности измерения горизонтальных углов и расстояний линейно-угловые ходы делятся на 2 большие группы: теодолитные ходы и полигонометрические ходы.
В теодолитных ходах горизонтальные углы измеряют с ошибкой не более 30¢¢; относительная ошибка измерений расстояний ms / S колеблется от 1/1000 до 1/3000.
В полигонометрических ходах горизонтальные углы измеряют с ошибкой от 0,4″ до 10¢¢, а относительная ошибка измерения расстояний ms / S бывает от 1/5000 до 1/300000.
7.2 Вычисление координат пунктов разомкнутого теодолитного угла
Каждый определяемый пункт линейно-углового хода имеет две координаты X и Y, которые являются неизвестными и которые нужно найти. В разомкнутом линейно-угловом ходе должны выполняться три условия: условие дирекционных углов и два координатных условия.
Условие дирекционных углов. Вычислим последовательно дирекционные углы всех сторон хода, используя формулу передачи дирекционного угла на последующую сторону хода:
α1-2 = αнач. + β1 – 180о;
α2-3 = α1 -2 + β2 –180 °;
………………… (7.5)
αn-1 = αn-2 + βn-2 – 180о
αкон.= αn-1 + βn - 180о.
Сложим эти равенства и получим теоретические суммы углов:
αкон. = αнач. + ∑β – 180о ·n, (7.6)
∑βтеор. = αкон. – αнач. + 180о·n - для левых углов, (7.7)
∑βтеор. = αнач – αкон. + 180о ·n - для правых углов. (7.8)
Сумма измеренных углов вследствие ошибок измерений, как правило, отличается от теоретической суммы на некоторую величину, называемую угловой невязкой и обозначаемую fβ:
fβ = ∑βизм.- ∑βтеор. (7.9)
Допустимое значение угловой невязки можно рассматривать как предельную ошибку суммы измеренных углов:
fβдоп. = 2·mβ·√n. (7.10)
Для теодолитных ходов mβ = 30″, поэтому:
fβдоп. = 1´√n. (7.11)
Одним из этапов уравнивания является введение поправок в измеренные величины с целью приведения их в соответствие с геометрическими условиями. Обозначим поправку в измеренный угол Vb и запишем условие:
 (7.12)
(7.12)
 , (7.13)
, (7.13)
т.е. поправки в углы следует выбрать так, чтобы их сумма была равна угловой невязке с противоположным знаком.
 ; (7.14)
; (7.14)
Это означает, что угловая невязка fβ распределяется с обратным знаком поровну во все измеренные углы.
Исправленные значения углов вычисляются по формуле:
βί = βί(изм.) + Vβί. (7.15)
По исправленным углам поворота вычисляют дирекционные углы всех сторон хода; совпадение вычисленного и заданного значений конечного исходного дирекционного угла является контролем правильности обработки угловых измерений.
Решая последовательно прямую геодезическую задачу, вычислим приращения координат по каждой стороне хода DXί, DYί, координаты пунктов хода получим по формулам:
 ;
;  ;
;

 ;
;
………………………………………………………..
 ;
;  ;
;
 ;
;  . (7.16)
. (7.16)
Сложим эти равенства и получим
 (7.17)
(7.17)
 , (7.18)
, (7.18)
 , (7.19)
, (7.19)
 . (7.20)
. (7.20)
- эти два условия называются координатными.
Суммы приращений координат называются теоретическими. Возникают координатные невязки хода:
 ; (7.21)
; (7.21)
 . (7.22)
. (7.22)
Вычисляют абсолютную невязку хода:
 , (7.23)
, (7.23)
а затем относительную невязку хода:
1/N = fS/ Σ(Si), (7.24)
где - Σ (Si) – сумма длин сторон хода.
Уравнивание приращений выполняют следующим образом. Сначала записывают суммы исправленных приращений:
 ;
;
 ;
;
и приравнивают к их теоретическим суммам:


откуда следует, что
 ;
;
 ; (7.25)
; (7.25)
На практике поправки в приращения координат вычисляют по формулам:
Vxί = -fχ × Sί / ∑S;
Vyi = -fy × Sί / ∑S, (7.26)
которые соответствуют условию – «поправки в приращения координат пропорциональны длинам сторон».
Рассмотренный способ обработки измерений в линейно-угловом ходе можно назвать способом последовательного распределения невязок; строгое уравнивание линейно-углового хода выполняется по методу наименьших квадратов.
После уравнивания одиночного линейно-углового хода ошибки положения его пунктов неодинаковы; они возрастают от начала и конца хода к его середине, и наибольшую ошибку положения имеет пункт в середине хода. В случае приближенного уравнивания эта ошибка оценивается половиной невязки хода fS. При строгом уравнивании хода производится сплошная оценка точности, то есть вычисляются ошибки положения каждого пункта хода, ошибки дирекционных углов всех сторон хода, а также ошибки уравненных значений углов и сторон хода.
7.3 Вычисление координат пунктов замкнутого теодолитного хода
Вычисление координат выполняется в том же порядке, что и в разомкнутом ходе; отличие состоит в вычислении теоретических сумм углов и приращений координат. Если в замкнутом ходе измерялись внутренние углы, то
 ; (7.27)
; (7.27)
если внешние, то
 ; (7.28)
; (7.28)
∑(∆χί) = 0; (7.29)
 . (7.30)
. (7.30)
7.4 Привязка линейно-угловых ходов
Под привязкой разомкнутого линейно-углового хода понимают включение в ход двух пунктов с известными координатами (это начальный и конечный исходные пункты хода) и измерение на этих пунктах углов между направлением с известным дирекционным углом (αнач . и αкон .) и первой (последней) стороной хода; эти углы называются примычными.
Привязка замкнутого линейно-углового хода – это включение в ход одного пункта с известными координатами и измерение на этом пункте примычного угла, то есть, угла между направлением с известным дирекционным углом и первой стороной хода.
Лекция 8
Конструктивные элементы геодезических измерительных приборов
План
8.1 Верньер. Штриховые и шкаловые микроскопы
8.2 Зрительная труба
8.3 Уровни
8.5 Поверки теодолита
8.1 Верньер. Штриховые и шкаловые микроскопы
Измерить какую-либо величину – значит сравнить ее с другой однородной величиной, принятой за единицу измерения. Приспособление, несущее единицу измерения, называется рабочей мерой.
Отсчетные приспособления: верньер, микрометр, микроскоп-микрометр, штриховой и шкаловый микроскопы, оптический микрометр и т.д.
Верньер – одно из простейших отсчетных приспособлений: отрезок в n делений шкалы переносят на прилегающую поверхность и делят его там же на (n+1) равных частей, получая шкалу верньера. Если обозначить через l цену деления основной шкалы и через m - цену деления верньера, точностью верньера t называется разность t = l – m. По построению l×n = m(n+1), поэтому  ,
,  , т.е. точность верньера равна цене деления основной шкалы, деленной на число делений верньера.
, т.е. точность верньера равна цене деления основной шкалы, деленной на число делений верньера.
Штриховой микроскоп. Отсчетным индексом в штриховом микроскопе является неподвижный штрих, выгравированный на стеклянной пластинке, помещенной на пути хода лучей, идущих от осветительного окошка через штрихи лимба в отсчетный микроскоп. Оценка доли деления лимба выполняется на глаз.
Шкаловый микроскоп. На пути хода лучей от осветительного окошка через штрихи лимба в поле зрения микроскопа помещена стеклянная пластинка с гравированной шкалой. Отсчетным индексом является нулевой штрих шкалы шкалового микроскопа.
Рен – это разность между номинальным n и фактическим n¢ количеством делений шкалы отсчетного устройства, укладывающихся в одном делении лимба.
При заметном несовпадении n -го штриха со штрихом лимба прибор полагается сдать в мастерскую.
8.2 Зрительная труба
Разрешающая способность человеческого глаза ограничена, критический угол зрения у человека в среднем 60¢¢ (у разных людей от 40¢¢ до 120¢¢).
Критическим углом называется предельный угол зрения, при котором две точки начинают сливаться в одну. Для увеличения поля зрения, когда он меньше критического значения, применяют различные оптические приспособления, одним из которых является зрительная труба.
Зрительные трубы бывают астрономическими и земными. Астрономические трубы дают обратное, т.е. перевернутое, изображение предметов, а земные – прямое.
В геодезических приборах чаще применяют астрономические трубы, т.к. они имеют более простое устройство и в них меньше потери света.
По конструкции зрительные трубы бывают прямые и ломаные. Основными деталями зрительных труб являются линзы – стеклянные пластинки различной формы; линзы бывают собирательные и рассеивающие.
Все собирательные линзы выпуклые: двояковыпуклые, плосковыпуклые, вогнутовыпуклые.
Все рассеивающие линзы вогнутые: двояковогнутые, плосковогнутые, выпукловогнутые.
Линия, соединяющая центры сферических поверхностей линзы, называется главной оптической осью линзы. Расстояние от оптического центра до фокуса называется фокусным расстоянием.
Под увеличением трубы понимают отношение угла зрения, под которым изображение предмета видно в трубе, к углу зрения, под которым предмет виден невооруженным глазом, т.е. без трубы.
V = α/β, (8.1)
где α – угол, под которым изображение предмета видно в трубе,
β – угол, под которым предмет виден невооруженным глазом.
Увеличение зрительной трубы равно отношению фокусного расстояния объектива к фокусному расстоянию окуляра.
V = fоб/fок, (8.2)
где f об – фокусное расстояние объектива;
fок – фокусное расстояние окуляра.
8.2.1Поле зрения трубы
Полем зрения трубы называют участок пространства, видимый в трубу при неподвижном ее положении. Поле зрения измеряют углом ε. Если ε выразить в градусах, то
ε = 40о/ V. (8.3)
Чем больше увеличение трубы, тем меньше ее угол зрения. Например, при V = 20x ε = 2о, а при V = 80x ε = 0,5°.
8.2.2 Разрешающая способность трубы
Оценивается по формуле
 . (8.4)
. (8.4)
Например, при 
 ; под таким углом виден предмет размером 5 см на расстоянии 3,3 км. Человеческий глаз может видеть этот предмет на расстоянии всего 170 м.
; под таким углом виден предмет размером 5 см на расстоянии 3,3 км. Человеческий глаз может видеть этот предмет на расстоянии всего 170 м.
8.2.3 Сетка нитей
Правильным наведением зрительной трубы считается такое, когда изображение предмета находится точно в центре поля зрения трубы.
Сетка нитей – это в простейшем случае два взаимно перпендикулярных штриха, нанесенных на стеклянную пластинку, которая крепится к диафрагме трубы.
Сетка нитей имеет исправительные винты: два боковых и два вертикальных.
Линия, соединяющая центр сетки нитей и оптический центр объектива, называется визирной линией или визирной осью трубы.
8.2.4 Установка трубы по глазу и по предмету
При наведении трубы на предмет нужно одновременно четко видеть сетку нитей и изображение предмета.
Установка трубы по предмету называется фокусированием трубы.
Трубы, у которых фокусирование выполняется путем изменения расстояния между объективом и сеткой нитей, называются трубами с внешней фокусировкой. Такие трубы имеют большую и притом переменную длину; они не герметичны, поэтому внутрь их попадает пыль и влага; на близкие предметы они вообще не фокусируются. В современных приборах они не применяются.
Более совершенными являются трубы с внутренней фокусировкой; в них применяется дополнительная подвижная рассеивающая линза. Трубы с внутренней фокусировкой короче; они герметичны и позволяют наблюдать близкие предметы; в современных измерительных приборах применяются в основном такие зрительные трубы.
8.3 Уровни
Уровни служат для приведения осей прибора в вертикальное или горизонтальное положение и для измерения малых углов наклона. Применение уровней основано на свойстве пузырька газа занимать в жидкости наивысшее положение. Уровни бывают цилиндрические и круглые.
Цилиндрический уровень состоит из ампулы и металлической оправы для ее крепления и защиты от внешних воздействий. Ампула – это стеклянная трубка, запаянная с обоих концов и заполненная спиртом или серным эфиром; небольшое пространство занимают пары этой жидкости, оно называется пузырьком уровня.
Ценой деления уровня t называется центральный угол, соответствующий дуге в одно деление шкалы на ампуле.
 Точка О в середине шкалы называется нульпунктом уровня, а касательная, проведенная в нульпункте, называется осью цилиндрического уровня U – U (рисунок 8.1). Если пузырек находится в нульпункте, то ось уровня занимает горизонтальное положение. При
Точка О в середине шкалы называется нульпунктом уровня, а касательная, проведенная в нульпункте, называется осью цилиндрического уровня U – U (рисунок 8.1). Если пузырек находится в нульпункте, то ось уровня занимает горизонтальное положение. При  ,
,
l = 2 мм и  получим R = 41 м
получим R = 41 м
 - угол наклона.
- угол наклона.
Рисунок 8.1 – Уровень
Цена деления уровня – это угол, на который отклонится ось уровня при смещении пузырька на одно деление шкалы.
Круглый уровень – это часть стеклянной сферы, на которую нанесены концентрические окружности. Центр окружностей является нульпунктом круглого уровня. Осью круглого уровня называется нормаль к сферической поверхности ампулы, проведенная в нульпункте. Если пузырек уровня находится в нульпункте, то ось занимает вертикальное положение.
Прибор для измерения на местности горизонтальных и вертикальных углов называется теодолитом.
Для установки теодолита на земле применяется специальный штатив, а совмещение центра лимба с отвесной линией, проходящей через вершину измеряемого угла, осуществляется с помощью оптического центрира или нитяного отвеса.
Стороны измеряемого угла проектируются на плоскость лимба подвижной вертикальной плоскостью, которая называется коллимационной плоскостью. Коллимационная плоскость образуется визирной осью зрительной трубы при вращении трубы вокруг своей оси.
Визирная ось трубы (или визирная линия) – это воображаемая линия, проходящая через центр сетки нитей и оптический центр объектива трубы.
8.4.1Основные части теодолита
Лимб – угломерный круг с делениями от 0 до 360°; при измерении углов лимб является рабочей мерой.
Алидада – подвижная часть теодолита, несущая систему отсчитывания по лимбу и визирное устройство – зрительную трубу.
Зрительная труба – крепится на подставках на алидадной части.
Система осей – обеспечивает вращение алидадной части и лимба вокруг вертикальной оси.
Вертикальный круг – служит для измерения вертикальных углов.
Подставка – с тремя подъемными винтами.
Зажимные и наводящие винты вращающихся частей теодолита: лимба, алидады, трубы; зажимные винты называются также закрепительными и стопорными, а наводящие – микрометренными.
Штатив с крючком для отвеса, площадкой для установки теодолита и становым винтом.
8.5 Поверки теодолитов
1)  Ось цилиндрического уровня при алидаде горизонтального уровня должна быть перпендикулярна к оси вращения алидады.
Ось цилиндрического уровня при алидаде горизонтального уровня должна быть перпендикулярна к оси вращения алидады.
2) Ось вращения алидады должна быть установлена отвесно.
3) Визирная ось трубы должна быть перпендикулярна к оси вращения трубы.
4) Ось вращения трубы должна быть перпендикулярна к оси вращения алидады.
5) Вертикальная нить сетки нитей должна лежать в коллимационной плоскости
(рисунок 8.2).
Рисунок 8.2 – Оси теодолита
Поверка 1. Ось цилиндрического уровня при алидаде горизонтального кругадолжна быть перпендикулярна к оси вращения алидады:
- вращая прибор, установить уровень параллельно двум подъемным винтам;
- этими подъемными винтами привести пузырек уровня в нульпункт;
- повернуть прибор точно на 180°;
- сосчитать количество делений n отклонения пузырька уровня от нульпункта;
- подъемными винтами сместить пузырек обратно на n/2 делений;
- исправительными винтами уровня привести пузырек в нульпунтк.
Поверка 2. Установка оси вращения алидады в вертикальное положение:
- вращая алидаду, устанавливают уровень // линии, соединяющей 2 подъемных винта, и приводят пузырек в нульпункт, действуя этими двумя винтами;
- вращают алидаду на 90°, т.е. устанавливают уровень по направлению 3-го подъемного винта, и, действуя этим подъемным винтом, приводят пузырек уровня в нульпункт. После этого вращают алидаду и устанавливают ее в произвольное положение, пузырек уровня должен остаться в нульпункте. Если он отклоняется больше, чем на одно деление, заново выполнить 1-ю поверку и снова установить ось алидады в вертикальное положение.
Процедура установки оси вращения алидады в вертикальное
положение называется горизонтированием теодолита.
Поверка 3. Поверка перпендикулярности визирной оси трубы и оси вращения трубы.
Эта поверка выполняется с помощью отсчетов по горизонтальному
кругу при наблюдении какой-либо визирной цели.
Если условие выполняется, то при вращении трубы вокруг своей оси,
визирная линия трубы описывает плоскость, совпадающую с
коллимационной плоскостью. Если угол между визирной линией трубы и
осью вращения трубы не равен точно 90°, то при вращении трубы визирная
линия будет описывать коническую поверхность с углом при вершине
конуса 180°- 2 С, где С – угол между фактическим положением визирной
линии трубы и ее теоретическим положением; угол С называют
коллимационной ошибкой (рисунок 8.3).
Если С = 0, то при наведении трубы на точку при двух положениях
вертикального круга: КЛ и КП разность отсчетов равна 180°. Для
теодолитов Т30, Т15, Т5 коллимационную ошибку определяют по
следующей методике:
1) Навести трубу при КЛ на четко видимую точку, расположенную вблизи горизонта, взять отсчет по лимбу  ;
;
2) Перевести трубу через зенит, навести ее на ту же точку при КП и взять отсчет по лимбу N'R; '
3) Ослабить зажимной винт подставки и повернуть теодолит относительно подставки на 180°;
4) Навести трубу на точку при КЛ, взять отсчет  ;
;
5) Навести трубу на точку при КП, взять отсчет  ;
;
6) Вычислить коллимационную ошибку по формуле:
 (8.5)
(8.5)
 Исправление коллимационной
Исправление коллимационной
ошибки:
– вычисляют правильный отсчет  , или
, или  и устанавливают его на лимбе.
и устанавливают его на лимбе.
При этом изображение точки не будет совпадать с центром сетки нитей на величину С. Боковыми
исправительными винтами сетки нитей совмещают центр сетки нитей с изображением точки. После этого повторяют определение 2 С.
Рисунок 8.3 – Коллимационная ошибка
Поверка 4. Поверка перпендикулярности оси вращения трубы к оси вращения алидады. Для поверки используют хорошо видимую высоко расположенную точку М (рисунок 8.4). Сначала наводят трубу на точку при КЛ и проектируют точку на уровень горизонта теодолита зрительной трубой; отмечают точку m1. Затем переводят трубу через зенит, наводят ее на точку при КП и снова проектируют точку на уровень горизонта теодолита; отмечают точку m2. Если ось вращения трубы перпендикулярна оси вращения алидады, то проекция точки М два раза попадет в точку m, в противном случае точек будет две – m1 и m2.

Рисунок 8.4 - Неравенство подставок
Положение, при котором один конец оси трубы выше другого, возникает, когда высота подставок трубы неодинакова, вследствие этого рассматриваемую поверку иногда называют поверкой неравенства подставок.
Для исправления угла между осями НН1 и ZZ1 нужно изменить высоту той подставки, которая имеет исправительный винт. Исправление выполняется методом последовательных приближений. Если теодолит не имеет исправительного винта подставки, то при обнаружении неравенства подставок его нужно сдать в мастерскую.
Поверка 5. Поверка сетки нитей. Наводят трубу на хорошо видимую точку и наводящим винтом смещают ее по высоте. Если при этом изображение точки остается на вертикальной нити сетки нитей, то условие выполняется.
Если изображение точки сходит с вертикальной нити, нужно ослабить исправительные винты сетки нитей и развернуть сетку в нужном направлении. После этого следует повторить поверку и снова определить коллимационную ошибку. После этого следует повторить поверку и снова определить коллимационную ошибку, так как при ослаблении и затягивании исправительных винтов сетки нитей ее центр мог сдвинуться в сторону.
Кроме геометрических условий у теодолита проверяют так называемые механические условия:
- отсутствие механических повреждений;
- плавность вращения всех вращающихся деталей;
- плавность и легкость работы всех зажимных винтов;
- плавность и равномерность работы наводящих винтов;
- равномерность и легкость работы подъемных винтов.
Лекция 9
Способы измерения горизонтальных углов
План
9.1 Виды теодолитов в зависимости от точности измерения углов
9.2 Способы измерения горизонтальных углов
9.2.1 Способ отдельного угла
9.2.2 Способ круговых приемов
9.3 Измерение вертикальных углов
9. 3.1 Вертикальный круг теодолита
9.4.1 Измерение стальной лентой и рулеткой
9.4.2 Приведение линий к горизонту
9.5 Оптические дальномеры
9.6 Понятие о светодальномерах
9.1 Виды теодолитов в зависимости от точности измерения углов
Высокоточные теодолиты обеспечивают точность измерения горизонтальных углов из одного приема не ниже 1´´. К ним относятся отечественные теодолиты Т05, Т1 и ОТ-02. Высокоточные теодолиты в основном используются для угловых наблюдений на пунктах триангуляции и полигонометрии 1 и 2-го классов.
Теодолиты повышенной точности обеспечивают точность измерения горизонтального угла из одного приема со средней квадратической ошибкой от 1,5´´ до 3´´. К ним относится отечественный теодолит 3Т2КП. Теодолиты повышенной точности применяются для измерения горизонтальных углов и направлений в триангуляции, полигонометрии, в геодезических сетях сгушения, в инженерной геодезии, астрономических измерениях.
Теодолиты средней точности обеспечивают точность измерения горизонтального угла одним приемом со средней квадратической ошибкой в пределах от 4´´ до 25´´. К теодолитам средней точности относятся отечественные теодолиты типа 4Т15П, 3Т5КП и др. Эти теодолиты применяются для измерения горизонтальных и вертикальных углов в теодолитных и тахеометрических ходах, для построения плановых и высотных съемочных сетей, нивелирования горизонтальным лучем с использованием цилиндрического уровня при зрительной трубе.
Теодолиты технические обеспечивают точность измерения горизонтального угла одним приемом со средней квадратической ошибкой 30´´.
Теодолиты технические применяются для измерения горизонтальных и вертикальных углов, расстояний нитяным дальномером при производстве различного рода разбивочно-привязочных работ. Имеется возможность нивелирования горизонтальным лучом с использованием цилиндрического уровня при зрительной трубе, определять магнитные азимуты направлений по прикладной буссоли.
По конструктивным особенностям теодолиты подразделяются на оптические, электронные и лазерные.
Дополнительная буква в шифре теодолита указывает на его модификацию или конструктивное решение: А- астрономический,
М - маркшейдерский, К - с конпенсатором при вертикальном круге, П – труба прямого изображения (земная). Государственным стандартом на теодолиты предусмотрено, кроме того, унификация отдельных узлов и деталей; вторая модификация имеет цифру 2 на первой позиции шифра-2Т2, 2Т5 и т.д., третья модификация имеет цифру 3- 3Т2, 3Т5КП.
Перед измерением угла необходимо привести теодолит в рабочее положение, т.е. выполнить три операции: центрирование, горизонтирование и установку зрительной трубы.
Центрирование теодолита - это установка оси вращения алидады над вершиной измеряемого угла; операция выполняется с помощью отвеса, подвешиваемого на крючок станового винта, или с помощью оптического центрира.
Горизонтирование теодолита - это установка оси вращения алидады в вертикальное положение; операция выполняется с помощью подъемных винтов и уровня при алидаде горизонтального круга.
Установка трубы - это установка трубы по глазу и по предмету; операция выполняется с помощью подвижного окулярного кольца (установка по глазу - фокусирование сетки нити) и винта фокусировки (кремальеры) трубы на предмет.
9.2 Способы измерения горизонтальных углов
Измерение угла выполняется строго по методике, соответствующей способу измерения; известно несколько способов измерения горизонтальных углов:
- способ отдельного угла (способ приемов);
- способ повторений;
- способ во всех комбинациях и др.
9.2.1 Способ отдельного угла:
а) наведение трубы на точку, фиксирующую направление первой стороны угла (рисунок 9.1), при круге лево (КЛ), взятие отсчета L1;
б) поворот алидады по ходу часовой стрелки и наведение трубы на точку, фиксирующую направление второй стороны угла; взятие отсчета L 2;
в) вычисление угла при КЛ
β л = L2 - L1; (9.1)
г) переведение трубы через зенит и наведение её на точку, фиксирующую направление первой стороны угла, при круге право (КП); взятие отсчета R1;
д) поворот алидады по ходу часовой стрелки и наведение трубы на точку, фиксирующую направление второй стороны угла; взятие отсчета R2;
е) вычисление угла при КП
β п=R2 - R1; (9.2)
ж) при выполнении условия | βл – βп| < 1.5·t, где t – точность теодолита, вычисление среднего значения угла:
βср= 0.5× (βл + βп). (9.3)
Измерение угла при одном положении круга (КЛ или КП) составляетодин полуприем; полный цикл измерения угла при двух положениях круга составляет один прием.
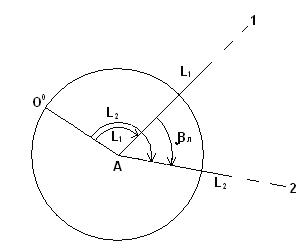
Рисунок 9.1 – Способ отдельного угла
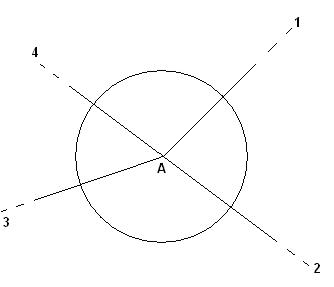
Рисунок 9.2 - Способ круговых приемов
9.2.2 Способ круговых приемов
Если с одного пункта наблюдается более двух направлений, то часто применяют способ круговых приемов (рисунок 9.2). Для измерения угла этим способом необходимо выполнить следующие операции:
а) при КЛ установить на лимбе отсчет, близкий к нулю, и навести трубу на первый пункт; взять отсчет по лимбу;
б) вращая алидаду по ходу часовой стрелки, навести трубу последовательно на второй, третий и т.д. пункты и затем снова на первый пункт; каждый раз взять отсчеты по лимбу;
в) перевести трубу через зенит и при КП навести её на первый пункт; взять отсчет по лимбу;
г) вращая алидаду против хода часовой стрелки, навести трубу последовательно на последний, третий, второй пункты и снова на первый пункт; каждый раз взять отсчеты по лимбу.
Затем для каждого направления вычисляют среднее из отсчетов при КЛ и КП и после этого значения углов относительно первого (начального) направления.
Способ круговых приемов позволяет ослабить влияние ошибок, действующих пропорционально времени, т.к. средние отсчеты для всех направлений относятся к одному физическому моменту времени.
9.3 Измерение вертикальных углов
Вертикальный угол – это плоский угол, лежащий в вертикальной плоскости. К вертикальным углам относятся угол наклона и зенитное расстояние. Угол между горизонтальной плоскостью и направлением линии местности называется углом наклона и обозначается буквой ν (ню). Углы наклона бывают положительные и отрицательные.
Угол между вертикальным направлением линии местности называется зенитным расстоянием (Z). Зенитные расстояния всегда положительные (рисунок 9.3). Угол наклона и зенитное расстояние одного направления связаны соотношением:
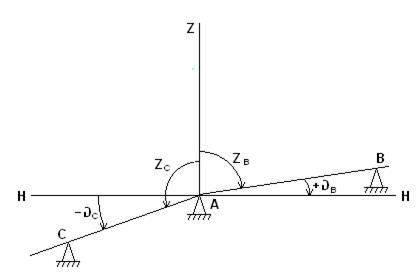
Рисунок 9.3 – Вертикальные углы
Угол наклона и зенитное расстояние одного направления связаны соотношением
Z + ν = 90о, (9.3)
или
ν = 90о – Z, (9.4)
или
Z = 90о - ν. (9.5)
9.3.1 Вертикальный круг теодолита
Вертикальный круг теодолита предназначен для измерения вертикальных углов, т.е. углов наклона и зенитных расстояний.
Вертикальный круг большинства теодолитов устроен следующим образом: лимб вертикального круга жестко соединен с трубой, центр лимба совмещен с геометрической осью вращения трубы, а его плоскость перпендикулярна этой оси. Деления на лимбе наносят по разному: либо от 0о до 360о, либо от 0о до 180о в обе стороны со знаками «плюс» и «минус» или без знаков и т.д., для отсчета по лимбу имеется алидада. Основные части алидады: отсчетное приспособление, цилиндрический уровень (или компенсатор) и микрометренный винт.
Пузырек уровня в момент отсчета приводится в нуль-пункт, то есть ось уровня служит указателем горизонтального направления. Отсчетным индексом является нулевой штрих отсчетного приспособления. Ось уровня и линия отсчетного индекса (линия, соединяющая отсчетный индекс с центром лимба) должны быть параллельны; при выполнении этого условия линия отсчетного индекса будет горизонтальна в момент взятия отсчета по вертикальному кругу.
Взаимное положение лимба и зрительной трубы должно удовлетворять условию: визирная линия трубы и нулевой диаметр лимба должны быть параллельны.
Оба условия вместе составляют так называемое главноеусловие вертикального круга теодолита:визирная линия трубы должна заниматьгоризонтальное положение, когда отсчет по лимбу равен нулю и пузырек уровня находится в нульпункте.
На практике это может быть нарушено.
Место нуля (МО) вертикального круга теодолита – это отсчет по лимбу вертикального круга при горизонтальном положении визирной линии трубы и оси уровня вертикального круга.
Для теодолитов 2Т30 и Т15
МО = 0,5·(КЛ + КП); (9.6)
ν = 0,5·(КЛ - КП); (9.7)
ν = КЛ – МО; (9.8)
ν = МО - КП. (9.9)
Положение вертикального круга, при котором отсчет по лимбу вертикального круга равен (с точностью до МО) углу наклона, считается основным; у большинства современных теодолитов основным положением является КЛ.
Для измерения углов наклона удобно иметь МО близким к нулю, поэтому нужно регулярно выполнять поверку МО, которая предусматривает следующие действия:
- наведение трубы на точку при КЛ, приведение пузырька уровня в нульпункт и взятие отсчета по вертикальному кругу;
- перевод трубы через зенит, наведение трубы на точку при КП, приведение пузырька уровня в нульпункт и взятие отсчета по вертикальному кругу;
- вычисление по соответствующим формулам места нуля МО и угла наклона ν.
Если МО получается большим, то при основном положении круга нужно навести трубу на точку и микрометренным винтом алидады установить отсчет, равный углу наклона; при этом пузырек уровня отклонится от нульпункта. Исправительными винтами уровня привести пузырек в нульпункт.
Мерные приборы
Различают непосредственное измерение расстояний и измерение расстояний с помощью специальных приборов, называемых дальномерами.
Непосредственное измерение выполняют инварными проволоками, мерными лентами и рулетками.
Инварные проволоки позволяют измерять расстояния с наибольшей точностью; относительная ошибка измерения может достигать одной миллионной, это означает, что расстояние в 1км измерено с ошибкой всего 1мм. Инвар – это сплав, содержащий 64% железа и 36% никеля; он отличается малым коэффициентом линейного расширения α = 0,5×10-6 (для сравнения: сталь имеет α = 12×10-6).
Мерные ленты обеспечивают точность измерений около 1/2000, т.е. для расстояния в 1 км ошибка может достигать 50 см. Мерная лента – это стальная лента шириной от 10 до 20 мм и толщиной 0,4 – 0,5 мм. Имеет длину 20, 24, 50 м. Целые метры отмечены пластинами с выбитыми на них номерами метров, полуметры отмечены круглыми заклепками, дециметры – круглыми отверстиями диаметром 2 мм.
Фактическая длина ленты или проволоки отличается от её номинальной длины на величину ∆ l. Фактическую длину ленты определяют, сравнивая ее с эталонной мерой. Процесс сравнения длины мерного прибора с эталоном называется компарированием, а установка, на которой производится компарирование, - компаратором.
Длина стальных рулеток бывает 20, 30, 50, 75 и 100 м. Точность измерения стальными рулетками зависит от методики измерений и колеблется от 1/2000 до 1/10000. Длину линии определяют 2 раза – в прямом и обратном направлениях.
9.4.1 Измерение линий стальной лентой или рулеткой
Измеряют линии, последовательно укладывая мерную ленту в створе линии. Прежде чем измерять линию, ее нужно подготовить, а именно: закрепить на местности ее концевые точки и обозначить створ. Створом линии называют отвесную плоскость, проходящую через конечные точки. Для обозначения створа линии провешивают, т.е. устанавливают вехи через 50-150 м в зависимости от рельефа.
Длину линии обычно измеряют два раза – в прямом и обратном направлениях. Допускается расхождение между результатами двух измерений на величину:
Dпр – Dобр≤ 2 × 1 ∕ Т × D, (9.10)
где D – длина линии;
1 ∕ Т – относительная ошибка измерения расстояния.
Например, при 1 ∕ Т = 1 ∕ 2000 и длине линии 500 м расхождение между прямым и обратным измерениями не должно превышать 0.5 м.
9.4.2 Приведение линий к горизонту
Измеренная линия имеет угол наклона ν; проекция ее на горизонтальную плоскость, называемая горизонтальным проложением линии, вычисляется по формуле:
S = D - ∆D, (9.11)
 где - ∆D поправка за приведение к горизонту. Формула для вычисления поправки ∆D выводится следующим образом.
где - ∆D поправка за приведение к горизонту. Формула для вычисления поправки ∆D выводится следующим образом.
Из ΔАВВ' (рисунок 9.4) видно, что
Рисунок 9.4 – Поправка за наклон
S = D × cos ν; (9.12)
∆D= D - D×·cos ν = D × (1-cos ν); (9.13)
∆D= 2×D·sin2 ν/2. (9.14)
Угол наклона линии измеряют либо теодолитом, либо эклиметром.
В исправном эклиметре нулевой диаметр всегда занимает горизонтальное положение. При наклоне эклиметра в прорезь виден отсчет, равный углу наклона линии. Ошибка измерения угла наклона эклиметром равна 15'- 30'.
Если линия имеет переменный угол наклона, то ее нужно разделить на части, каждая из которых имеет постоянный угол наклона, и измерить каждую часть отдельно.
При ν = 1,5о - поправка за наклон не превышает 1∕ 6500, а точность измерения мерной лентой – около 1∕ 2000, следовательно, поправкой за наклон можно пренебречь.
Поправку ΔD за наклон линии можно вычислять и через превышение h точки В над точкой А. Запишем теорему Пифагора для треугольника АВВ':
D2= S2+h2 (9.15)
и выразим S
S = D· (1 - h2∕D2)1∕2. (9.16)
D – S = ΔD = h2 / D. (9.17)
9.5 Оптические дальномеры
В дальномерах измеряется не сама длина линий, а некоторая другая величина, относительно которой длина линий является функцией.
В геодезии применяется три вида дальномеров:
- оптические (дальномеры геометрического типа);
- электрооптические (светодальномеры);
- радиотехнические (радиодальномеры).<
|
|








