 2020-10-12
2020-10-12 108
108Введение
В настоящее время мы вошли и прочно обосновались в мире цифровой техники. Цифровая техника заняла очень большое место в жизни человека. Она используется во всех отраслях промышленности и быта.
Микроконтроллер (МК) - разновидность микропроцессорной системы, отличающийся тем, что содержит внутри постоянную оперативную память и многочисленные устройства ввода / вывода, аналоговые и цифровые преобразователи, последовательные и параллельные каналы передачи информации, широтно-импульсные модуляторы, генераторы программируемых импульсов, таймеры реального времени, модули обработки сигналов.
МК выполняются в различных корпусах с различным количеством выводов, которые не выполняют никаких функций и могут быть только входами или выходами.
МК классифицируются по разрядности данных: 4-х, 8-ми, 16-ти, 32-х разрядные.
Общие тенденции современных МК - это уменьшение числа внешних элементов, т.е. на кристалле микросхемы размещают всевозможные нагрузочные («подтягивающие») резисторы, конденсаторы, цепи логики и т.п.
Для реализации микропроцессорного устройства измерения высоты выбираем микроконтроллер (МК) семейства PICmicro компании Microchip PIC16F873.
Для данного МК характерна высокоскоростная архитектура, позволяющая выполнять все команды за один цикл, кроме инструкций переходов, выполняемых за два цикла. Всего система команд содержит 35 инструкций.
Под одним циклом понимается четыре такта тактового генератора. Частота тактового генератора Fosc/4 (максимальная частота 20 МГц).
В микроконтроллере (МК) PIC16F873 память программ и данные расположены в отдельных блоках и для обращения к ним используются отдельные шины.
По шине данных передаются восьмиразрядные слова данных, а по шине команд (программ) четырнадцатиразрядные коды операций.
Все регистры специального назначения отображаются в адресном пространстве памяти данных, разделенной на четыре банка.
Система команд позволяет использовать любой регистр в любой команде, используя необходимый режим адресации (прямой, косвенный, относительный). Регистром косвенной адресации является FSR. Его содержимое используется как четыре младших разряда адреса (индекса).
Анализ технического задания
Взаимосвязь измеряемой высоты с электрическим эквивалентом имеет вид:
T=k*H [мс],
где H - высота, км, k=2 мс/км.
Таким образом, измерение высоты сводиться к измерению длительности прямоугольного импульса.
Определим длительность импульса:
Hmin=0.1 км, Tmin=0.1 км *2 мс/км =0,2 мс.
Hmax=20 км, Tmax=20 км *2 мс/км =40 мс.
Погрешность измерения ΔН=±0.1 км или ΔТ=±0,2 мс.
Измерение длительности импульса легко реализовать на основе любого микроконтроллера семейства PIC16F87x компании Microchip.
Описание выбранного метода измерения
Основным методом измерения длительности импульса является метод непосредственного счета, суть которого заключается в том, что берется некая квантующая частота fk и определяется, сколько периодов ТК квантующей частоты укладывается в длительность измеряемого импульса. То есть числовой эквивалент будет иметь вид
 .
.
В нашем случае при квантовании микроконтроллера частотой 4 МГц, частота квантования таймера составит 1 МГц, погрешность квантования 1 мкс.
Для измерения длительности прямоугольного импульса с помощью микроконтроллера необходимо отслеживать появление его переднего и заднего фронтов. Для этого нужно настроить любой порт МК как цифровой вход и отслеживать момент, когда на нем появится логический «0», а затем логическая «1» т.е. передний фронт импульса. Как только на входе появится логическая «1», необходимо запустить таймер, который будет считать количество отсчетов постоянной частотой тактирования fk. Далее необходимо постоянно отслеживать появление логического «0» на входе, т.е. приход заднего фронта импульса. При появлении логического «0» на входе надо остановить таймер. Затем, зная количество отсчетов можно вычислить длительность прямоугольного импульса.
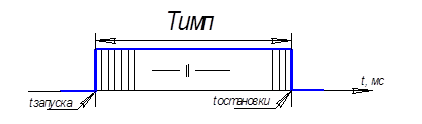
Рис. 1. Измерение длительности импульса
Функциональная схема измерителя высоты представлена на рис. 2.
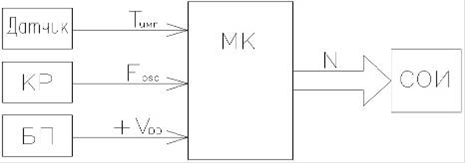
Рис. 2. Функциональная схема
Измеряемый импульс поступает в микроконтроллер (МК) с датчика, кварцевый резонатор (КР) задает тактовую частоту микроконтроллера. Микроконтроллер осуществляет измерение длительности импульса и преобразование полученного числового эквивалента, который после преобразования выдается на индикацию. Питание микроконтроллера осуществляется от блока питания (БП).








