 2014-02-02
2014-02-02 1592
1592В установках наземного бурения с глубиной скважин до 5000 м применяется более современный асинхронный электропривод буровой лебедки с тиристорным регулятором скольжения (АД-ТРС). В цепь ротора двигателя МЛ (рис. 9, а) включен трехфазный управляемый выпрямитель UZ, собранный по мостовой схеме, нагрузкой которого служат пусковые резисторы R1-R3, шунтируемые в процессе пуска тиристорами VS1-VS3.
|
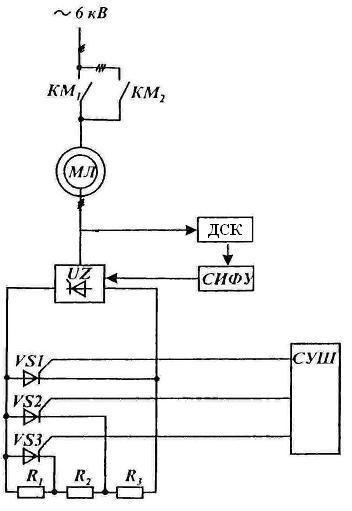
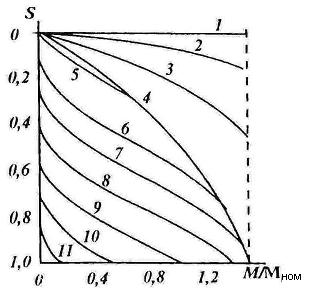
Рис. 9. Функциональная схема (а) и механические характеристики (б) асинхронного электропривода буровой лебедки с тиристорным регулятором скольжения (ТРС):
СИФУ – система импульсно-фазового управления выпрямителем; СУШ – система управления шунтирующими тиристорами; ДСК – датчик скольжения.
1 – естественная характеристика; 2 – характеристика на третьей ступени пускового реостата (Rп=R3) и при полностью открытом преобразователе UZ; 3 – характеристи-ка на второй ступени пускового реостата (Rп=R2+R3); 4 – характеристика на первой ступени пускового реостата (Rп=R1+R2+R3); 5-11 – характеристики двигателя на первой ступени пускового реостата при различных значениях напряжения управления.
Суммарное сопротивление пусковых резисторов выбрано из условия обеспечения стопорного момента двигателя, равного (1,5¸1,6) Мном, при полностью открытом выпрямителе. Плавность пуска обеспечивается путем управления тиристорами выпрямителя.
Плавное открытие выпрямителя UZ выводит двигатель на промежуточную частоту вращения, определяемую суммарным сопротивлением резисторов. Для дальнейшего разгона в схеме пусковых резисторов введены три шунтирующих тиристора VS1-VS3, которые включаются по сигналу, соответствующему полному открытию тиристорного выпрямителя UZ. Последний шунтирующий тиристор VS3 шунтирует резистор R3 и выводит двигатель на характеристику, близкую к естественной.
Так как по окончании пуска резисторы (R1-R3) полностью зашунтированы, в установившемся режиме скольжение двигателя равно 2% вместо 7-10%, имеющих место при пуске с активно-индуктивным сопротивлением. Схема с тиристорным регулятором скольжения дает существенную экономию электроэнергии вследствие уменьшения сопротивления роторной цепи двигателя.
Управление электроприводом осуществляется сельсинным командоаппаратом. Для стабилизации характеристик используется обратная связь по скорости.
Система управления позволяет обеспечить регулируемый пуск двигателя с плавным нарастанием момента при нагрузке в диапазоне от нуля до максимального момента и длительную работу при пониженной скорости при нагрузке, равной половине номинального момента, а также работу в повторно-кратковременном режиме. Механические характеристики электропривода приведены на рис. 9, б.

