 2014-02-02
2014-02-02 696
696.
Подключая фильтр в единую схему с системой, получаем эквивалентную передаточную функцию
 . (8.76)
. (8.76)
В результате любой стационарный случайный процесс можно представить эквивалентным ему процессом на выходе формирующего фильтра при воздействии на его вход белого шума. Такое представление реального сигнала облегчает определение СКО, так как позволяет анализировать САУ методами для входного белого шума.
8.9.2. Расчет флуктуационных ошибок и ошибок
от задающих воздействий
Предположим, что на вход системы (рис.8.12) поступает помеха f(t), а полезный сигнал x(t)=0. Требуется определить флуктуационную ошибку, вызываемую отработкой системы помехи на ее входе. Спектральная плотность помехи равна  . Передаточная функция системы известна.
. Передаточная функция системы известна.
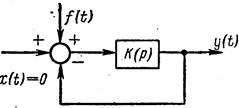
Рис. 8.12. К определению флуктуационной ошибки
Поскольку в этом случае весь сигнал на выходе системы представляет собой сигнал ошибки, спектральная плотность ошибки равна
 , (8.77)
, (8.77)
где  квадрат амплитудно-частотной характеристики замкнутой системы.
квадрат амплитудно-частотной характеристики замкнутой системы.
Для облегчения вычисления интеграла (8.74) и приведения его к табличному спектральную плотность входного сигнала представляем в виде
 . (8.78)
. (8.78)
Подставляя (8.78) в (8.77) и обозначая  , получим
, получим
 . (8.79)
. (8.79)
Обычно К0(Р) — рациональная дробь,  также может быть представлено в виде рациональной дроби.
также может быть представлено в виде рациональной дроби.
Учитывая (8.72) и (8.74), получим выражение для среднего квадрата ошибки в виде табличного интеграла:
 , (8.80)
, (8.80)
где многочлены под интегралом
причем  .
.
Таблицы интегралов до п = 6 приведены в литературе [9].
Если помеха действует не на входе системы, то вместо К0(р) берется передаточная функция Kyf(p), соответствующая месту приложения воздействия f.
Рассмотрим более общий случай, когда на систему помимо задающего воздействияx(t) действует одновременно помеха f(t)/
Суммарная ошибка
 .
.
Спектральная плотность ошибки

 (8.81)
(8.81)
где

и 
представляют собой взаимные спектральные плотности полезного сигнала и помехи, а  и
и  — частотные характеристики ошибки от полезного сигнала и помехи. При отсутствии корреляции между полезным сигналом и помехой
— частотные характеристики ошибки от полезного сигнала и помехи. При отсутствии корреляции между полезным сигналом и помехой

и формула (8.81) упрощается:
 . (8.82).
. (8.82).
Для помехи, приложенной совместно с задающим воздействием, когда  и при отсутствии корреляции между ними получим
и при отсутствии корреляции между ними получим
 (8.83).
(8.83).
Средний квадрат ошибки
 , (8.84)
, (8.84)
где
 (8.85)
(8.85)
- составляющая дисперсии ошибки, вызываемая задающим воздействием  ;
;
 (8.86)
(8.86)
- составляющая дисперсии ошибки, вызываемая возмущающим воздействием f(t).
Среднеквадратическое значение суммарной ошибки системы
 . (8.87)
. (8.87)
Среднеквадратическую ошибку системы, определяемую по формуле (8.87), не следует смешивать со среднеквадратическим отклонением  , которое равно положительному квадратному корню из дисперсии
, которое равно положительному квадратному корню из дисперсии  .
.
Как следует из формулы (8.84) среднее значение квадрата ошибки зависит от структуры системы (вида ее передаточной функции и параметров) и от спектральных плотностей входного сигнала и помехи.
Для минимизации соответствующей составляющей ошибки системы необходимо уменьшать площадь под кривой произведения спектральной плотности входного сигнала на квадрат амплитудно-частотной характеристики.
Заменяя в выражении (8.85) передаточную функцию ошибки на передаточную функцию замкнутой системы K0(p), получим средний квадрат выходной величины  .
.
Если в задающем сигнале x(t) можно выделить воздействие в виде неслучайной составляющей mx(t), представляющей собой медленно меняющуюся функцию времени, и стационарный центрированный случайный процесс, т. е.
 ,
,
то точность системы можно оценить средним квадратом ошибки, равным сумме квадратов динамической и случайной ошибок:

или
 .
.
Здесь  — коэффициент, определяющий удельный вес динамической ошибки;
— коэффициент, определяющий удельный вес динамической ошибки;
 ,
,
где D0, D1,D2,... — коэффициенты ошибки.
Для случая, когда можно предположить, что скорость изменения задающего воздействия постоянна в течение рассматриваемого интервала времени, т. е.  , а помеха - белый шум, в соответствии с (8.84) получим для систем с астатизмом 1-го порядка
, а помеха - белый шум, в соответствии с (8.84) получим для систем с астатизмом 1-го порядка
 .
.
Пример. Определить средний квадрат суммарной ошибки САУ с передаточной функцией  , если на входе системы действует задающее воздействие со спектральной плотностью
, если на входе системы действует задающее воздействие со спектральной плотностью  и помеха со спектральной плотностью
и помеха со спектральной плотностью  . Ошибка системы определяется формулой (8.84). Вторая доставляющая ошибки уже была определена.
. Ошибка системы определяется формулой (8.84). Вторая доставляющая ошибки уже была определена.
 .
.
Вычислим первую составляющую ошибки (от задающего воздействия).
Передаточная функция ошибки
 .
.
Представим спектральную плотность через сопряженные составляющие:
 .
.
Находим
 .
.
Табличный интеграл
 .
.
Окончательно получим
 .
.
Из данного выражения следует, что для уменьшения составляющей ошибки от полезного сигнала необходимо увеличение  , а для уменьшения составляющей ошибки от помех
, а для уменьшения составляющей ошибки от помех  нужно уменьшать.
нужно уменьшать.
Основным достоинством аналитического метода является возможность установления связи между величиной СКО и параметрами системы, что позволяет определять значения параметров системы, при которых СКО оказывается минимальной.
Лекция 30
План лекции:
1. Графоаналитический метод расчета случайных ошибок САУ.
2. Оценка флуктуационных ошибок, обусловленных широкополосными
воздействиями.
3. Расчет дисперсии помехи с помощью корреляционной функции.
4. Определение флуктуационных ошибок с помощью электронной модели
5. Рекомендуемая литература [9].
8.9.3. Графоаналитический метод расчета
В инженерной практике для систем управления высокого порядка применяют приближенный графоаналитический метод определения случайных ошибок. Его удобно применять, если спектральные плотности задающего воздействия  и помехи
и помехи  и амплитудно-частотные характеристики заданы графически или описываются сложными выражениями. Метод является наглядным и позволяет сразу решить, как нужно изменить частотные характеристики системы, чтобы уменьшить ошибку, вызванную случайным сигналом.
и амплитудно-частотные характеристики заданы графически или описываются сложными выражениями. Метод является наглядным и позволяет сразу решить, как нужно изменить частотные характеристики системы, чтобы уменьшить ошибку, вызванную случайным сигналом.
Рассмотрим этот метод применительно к вычислению ошибки от помех.
Поскольку спектральная плотность ошибки  функция четная, то можно записать
функция четная, то можно записать
 . (8. 88 )
. (8. 88 )
Имея в виду, что
 , (8.89)
, (8.89)
при известных передаточной функции системы  и спектральной плотности стационарного случайного воздействия на входе системы
и спектральной плотности стационарного случайного воздействия на входе системы  можно предложить следующий порядок расчета среднеквадратической ошибки.
можно предложить следующий порядок расчета среднеквадратической ошибки.
1. Строится АЧХ замкнутой системы  (рис. 8.13). Ординаты этой кривой возводятся в квадрат и строится кривая
(рис. 8.13). Ординаты этой кривой возводятся в квадрат и строится кривая  .
.
Рис. 8.13. К графоаналитическому определению флуктуационной ошибки
2. Строится кривая спектральной плотности  для случайного сигнала ошибки. Для этого значение спектральной плотности на входе умножается на величину квадрата АЧХ системы для каждой данной частоты.
для случайного сигнала ошибки. Для этого значение спектральной плотности на входе умножается на величину квадрата АЧХ системы для каждой данной частоты.
3. Определяется значение интеграла  . Для этого подсчитывается площадь, заключенная между кривой и осью абсцисс.
. Для этого подсчитывается площадь, заключенная между кривой и осью абсцисс.
4. Средний квадрат ошибки в соответствии с формулой (8.86) определяется путем деления найденной площади на  , т. е.
, т. е.
 . (8.90)
. (8.90)
Среднеквадратическая ошибка вычисляется по формуле:
 . (8.91)
. (8.91)
График спектральной плотности ошибки можно также рассчитать, пользуясь логарифмическими частотными характеристиками (ЛЧХ). По заданному значению К(р) определяют логарифмические амплитудно-частотные (ЛАЧХ) и фазо-частотные характеристики (ЛФЧХ) разомкнутой  системы, затем находят ЛАЧХ замкнутой системы
системы, затем находят ЛАЧХ замкнутой системы  , ее значения удваивают, т. е. определяют
, ее значения удваивают, т. е. определяют  . Значения суммируются с величиной
. Значения суммируются с величиной  . В результате получаем
. В результате получаем
 .
.
Для определения ошибки поступают далее так же, как и в пп. 3 и 4.
Как видно из соотношения (8.89), флуктуационная ошибка в общем случае зависит от взаимного расположения графиков и  (рис.8.13). При совпадении максимумов характеристик флуктуационная ошибка оказывается большой, и наоборот, разнесение этих максимумов выбором параметров системы приводит к уменьшению флуктуационной ошибки. Это следует учитывать при расчете САУ.
(рис.8.13). При совпадении максимумов характеристик флуктуационная ошибка оказывается большой, и наоборот, разнесение этих максимумов выбором параметров системы приводит к уменьшению флуктуационной ошибки. Это следует учитывать при расчете САУ.
Уменьшения флуктуационной ошибки можно также добиться путем уменьшения пика АЧХ, т. е. выполнением системы более узкополосной и достаточно задемпфированной (уменьшить  – частоту среза разомкнутой системы).
– частоту среза разомкнутой системы).
8.9.4. Оценка флуктуационных ошибок, обусловленных
широкополосными воздействиями
Во многих случаях воздействие обладает широкополосным спектром и в пределах полосы пропускания САУ оказывается практически постоянным  (рис. 8.13). При этих условиях флуктуационную ошибку с определенным приближением можно вычислить по формуле:
(рис. 8.13). При этих условиях флуктуационную ошибку с определенным приближением можно вычислить по формуле:
 , (8.92)
, (8.92)
где  - полоса шумов САУ (эффективная полоса пропускания системы). Полосу шумов
- полоса шумов САУ (эффективная полоса пропускания системы). Полосу шумов  можно определить аналитически, пользуясь теоремой Парсеваля:
можно определить аналитически, пользуясь теоремой Парсеваля:
 .
.
Заменяя  на р, получим
на р, получим
 , (8.93)
, (8.93)
т. е. полоса шумов равна табличному интегралу  , полиномы числителя и знаменателя подынтегрального выражения которого совпадают с соответствующими полиномами передаточной функции системы, умноженному на
, полиномы числителя и знаменателя подынтегрального выражения которого совпадают с соответствующими полиномами передаточной функции системы, умноженному на  .
.
В табл. 8.1 приведены значения  для некоторых элементарных звеньев и систем, выраженные через их параметры.
для некоторых элементарных звеньев и систем, выраженные через их параметры.
Учитывая, что спектральная плотность шума Sf(0)=Sf постоянна и задана на ограниченной полосе частот от  до
до  , иногда удобно использовать определение дисперсии на выходе системы
, иногда удобно использовать определение дисперсии на выходе системы
 ,
,
где - дисперсия на входе системы.
- дисперсия на входе системы.
Пример 1. Определить системы с передаточной функцией
 .
.
Передаточная функция замкнутой системы
 .
.
Следовательно,
 .
.
Для приближенных расчетов можно положить
 ,
,
где — частота среза разомкнутой системы;  — полоса пропускания замкнутой системы.
— полоса пропускания замкнутой системы.
Таблица 8.1
| K(p) |
|

| 
|
| 
|
| 
|
| 
|
| 
|
Пример 2. Рассчитать флуктуационную ошибку САУ, имеющей частоту среза  = 11сек-1 и запас по фазе
= 11сек-1 и запас по фазе  =45°.
=45°.
По приближенным соотношениям находим
 .
.
Флуктуационная ошибка
 .
.
Полоса шумов по формуле (8.93)
 .
.
Флуктуационная ошибка
 .
.
Следовательно, приближенный метод расчета флуктуационной ошибки при приемлемых запасах устойчивости имеет достаточную точность.
Лекция 31
План лекции:
1. Расчет дисперсии помехи с помощью корреляционной функции.
2. Вычисление среднеквадратической ошибки следящей системы.
3. Рекомендуемая литература [9].
8.9.5. Расчет дисперсии помехи с помощью
корреляционной функции
Для определения дисперсии помехи можно воспользоваться соотношением (8.25), согласно которому
 . (8.94)
. (8.94)
Если наряду с двусторонним преобразованием Фурье (8.27) и (8.29) рассмотреть односторонние преобразования:
 , (8.95)
, (8.95)
 , (8.96)
, (8.96)
где — правая полуветвь двусторонней четной корреляционной функции;
— правая полуветвь двусторонней четной корреляционной функции;  — ее комплексный спектр,
— ее комплексный спектр,
то расчеты по формуле (8.94) могут быть осуществлены, как у Шаталова А. С., в области изображений на основе предельного перехода:
 (8.97)
(8.97)
Вследствие четности корреляционной функции  и спектральной плотности
и спектральной плотности  между односторонним и двусторонним преобразованиями Фурье устанавливается зависимость:
между односторонним и двусторонним преобразованиями Фурье устанавливается зависимость:
 , (8.98)
, (8.98)
причем
 , (8.99)
, (8.99)
где  — вещественная часть комплексного спектра;
— вещественная часть комплексного спектра;  — его мнимая часть;
— его мнимая часть;  — символическая запись операции определения по вещественной части комплексного спектра его мнимой части.
— символическая запись операции определения по вещественной части комплексного спектра его мнимой части.
Учитывая (8.99), формулу (8.97) можно представить в виде
 (8.100)
(8.100)
Помимо определения одной точки корреляционной функции ( =0), часто требуется нахождение полной корреляционной функции по ее полуветви (>0),
=0), часто требуется нахождение полной корреляционной функции по ее полуветви (>0),
т. е.
 (8.101)
(8.101)
где  — операция обратного преобразования Фурье.
— операция обратного преобразования Фурье.
Пример. Определить корреляционную функцию на выходе системы при входном белом шуме единичного уровня.
Передаточная функция системы
 (8.102)
(8.102)
или частотная характеристика
 . (8.103)
. (8.103)
Учитывая, что  , имеем
, имеем
 (8.104)
(8.104)
В соответствии с (8.99) нетрудно установить, что комплексный спектр корреляционной функции на выходе системы должен иметь тот же знаменатель, что и (8.103). Поэтому
 (8.105)
(8.105)
Раскрывая соотношение (8.98), определим неизвестные коэффициенты  :
:
 (8.106)
(8.106)
Из (8.106) следует тождество:
 (8.107)
(8.107)
Приравнивая коэффициенты при одинаковых степенях  в левой и правой частях тождества (8.107), получаем систему уравнений:
в левой и правой частях тождества (8.107), получаем систему уравнений:


 ;
;
откуда
 ,
,
 .
.
Таким образом, определен комплексный спектр корреляционной функции (8.105). В преобразованной по Лапласу форме его можно записать как
Путем обратного преобразования Лапласа находят всю правую полуветвь корреляционной функции:
для некратных полюсов  .
.
На основе предельного перехода (8.97) можно определить только выходную дисперсию
 .
.
Аналогичным путем можно произвести расчет выходной корреляционной функции при произвольной стационарной помехе. При этом входная спектральная плотность формируется из белого шума единичного уровня некоторым формирующим фильтром с передаточной функцией  , определяемой из уравнения:
, определяемой из уравнения:
 .
.
Полученные ранее формулы для частного вида передаточной функции (8.102) могут быть обобщены на передаточную функцию произвольного порядка.
Предложенная методика преобразования корреляционных функций помех позволяет однотипным методом на основе одних и тех же определителей с различными замещенными столбцами рассчитывать не только дисперсию, но и все свойства корреляционной функции на выходе системы при заданном стационарном случайном воздействии. В ряде случаев это дает некоторые расчетные преимущества по сравнению с непосредственными расчетами по формуле (8.41) даже при использовании табличных интегралов.
8.9.6. вычисление среднеквадратической ошибки
следящей системы
Найдем среднеквадратическую ошибку следящей системы автосопровождения цели радиолокационной станцией. На вход системы поступает задающее воздействие  (азимут цели) совместно с помехой f(t). Сигнал ошибки равен разности входного полезного сигнала x(t) и сигнала на выходе
(азимут цели) совместно с помехой f(t). Сигнал ошибки равен разности входного полезного сигнала x(t) и сигнала на выходе  (азимут антенны) следящей системы РЛС:
(азимут антенны) следящей системы РЛС:
 .
.
Задающее воздействие и помеха — стационарные случайные не коррелированные сигналы. Такой сигнал поступает на усилительное устройство системы. Передаточная функция разомкнутой системы
 .
.
Спектральная плотность ошибки
 .
.
Задающим воздействием системы будем считать  . Спектральная плотность его найдена в формуле (8.50). В качестве помехи примем случайный процесс типа белого шума:
. Спектральная плотность его найдена в формуле (8.50). В качестве помехи примем случайный процесс типа белого шума:
 .
.
Подставив в выражение спектральной плотности ошибки ее составляющие, получим:
 ,
,
где
 ,
,
т. e. среднее значение квадрата ошибки можно представить в виде суммы составляющих:
 .
.
Пользуясь выражением для табличного интеграла, значение квадрата СКО  найдем в виде
найдем в виде
 .
.
Аналогично можно определить квадрат СКО:
 .
.
Если известны параметры системы и помехи  ,
,  , то среднеквадратическая ошибка:
, то среднеквадратическая ошибка:

Выражения для дисперсии флуктуационной ошибки, определенной через параметры передаточной функции разомкнутой системы К(р), при постоянной величине спектральной плотности помехи на входе, системы, приведены в табл. 8.2.
Таблица 8.2
| Передаточные функции К(р) | Дисперсия 
|
| 
|

| 
|

| 
|
B заключение отметим, что приведенные соотношения для статистического анализа в частотной области удобны в установившемся режиме. Анализ во временной области более сложен, но целесообразен для моментов времени, близких к моменту приложения воздействия.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования – М.: Наука,1975. – 768 с.
2. Воронов А.А. Основы теории автоматического управления. Автоматическое регулирование непрерывных систем. –М.: Энергия, 1980. –312 с.
3. Макаров И.М., Менский Б.М. Линейные автоматические системы. Элементы теории, методы расчета и справочный материал. – М.: Машиностроение, 1982. – 504 с.
4. Попов Е.П. Теория линейных систем автоматического регулирования и управления. – М.: Наука, 1989. – 301 с.
5. Сборник задач по теории автоматического регулирования и управления / Под ред. В.А. Бесекерского. – М.: Наука, 1978. – 512 с.
6. Справочник по теории автоматического управления / Под ред. А.А. Красовского. – М.: Наука, 1987. – 712 с.
7. Теория автоматического управления / Под ред. А.С.Шаталова. – М.: Высшая школа, 1977. – 448 с.
8. Техническая кибернетика. Теория автоматического регулирования / Под ред. В.В. Солодовникова. Кн.1,2,3. – М.: Машиностроение, 1967-1969.
9. Лившиц Н.А., Пугачев В.Н. Вероятностный анализ систем автоматического управления. – М.: Сов. Радио, 1963. – 896 с.
Рассмотрено на заседании
кафедры ПУ
Протокол № от 2005 г.
Зав. кафедрой ПУ__________________ В. Я. Распопов








