2014-02-02
2014-02-02 1577
1577Звено запаздывания передает сигнал со входа на выход без искажения его формы, однако мгновенные значения выходной величины повторяют мгновенные значения входной величины с некоторым отставанием во времени (запаздыванием). Способностью задерживать сигналы во времени, не изменяя их формы, обладают многие элементы промышленных автоматических систем. В первую очередь к таким элементам относятся различные транспортирующие устройства (ленточные питатели, конвейеры; длинные трубопроводы, паропроводы, газопроводы), подающие различные материалы в технологические аппараты. Запаздыванием часто обладают аппараты с большими размерами, в которых происходят тепло- и массообменные процессы, распределенные в пространстве аппарата (печи по термообработке материалов, сушильные барабаны, пароперегреватели котлов и т.п.).
В качестве примера рассмотрим ленточный транспортер для подачи сыпучего материала из входного бункера в выходной бункер (рис 3.19).
| Рис. 3.19. Пример звена запаздывания |
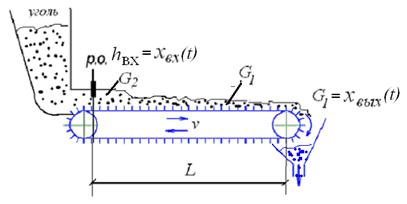
Лента транспортера движется со скоростью v [м/с]; длина транспортера от регулирующего органа (шибера) до конца ленты составляет L [м]; G 1 [кг/с] – расход сыпучего материала в статическом режиме до нанесения возмущения регулирующим органом; G 2 – расход сыпучего материала после нанесения возмущения (регулирующий орган приоткрылся). Из рис. 3.19 видно, входная величина х вх(t)= G 2 – G 1=D G, а выходная величина х вых(t)= х вх(t)=D G через промежуток времени, необходимый на транспортировку измененного расхода от регулирующего органа до ссыпания в выходной бункер.
Динамическая характеристика звена запаздывания представлена на рис. 3.20.
| Рис. 3.20. Динамическая характеристика звена запаздывания |
Промежуток времени t0 (рис. 3.20) называют временем транспортного запаздывания (временем чистого запаздывания). Его обычно можно определить по известным данным: скорости движения ленты v и расстоянию L.
Уравнение звена запаздывания записывается в виде
 . (3.63)
. (3.63)
Это уравнение со смещенным (запаздывающим) аргументом. Оно указывает на то, что выходной сигнал х вых(t) повторяет все изменения входного сигнала х вх(t), но с отставанием на время t0.
Применяя теорему запаздывания (см. табл. 2.2), можно записать уравнение (3.63) в операторной форме:
 , (3.64)
, (3.64)
откуда передаточная функция звена
 . (3.65)
. (3.65)
Частотные характеристики звена.
Амплитудно-фазовая характеристика звена
 , (3.66)
, (3.66)
из которой следует
 ;
;  . (3.67)
. (3.67)
Звенья запаздывания существенно уменьшают область устойчивости систем автоматического регулирования.