 2014-02-02
2014-02-02 3436
3436Особенностью простых объектов регулирования является то, что они содержат одну емкость. Отклонение параметра у таких одноемкостных объектов начинается сразу, после нанесения возмущения и с максимальной в первый момент времени скоростью для этого возмущения. На практике при автоматизации тепловых процессов приходится встречаться, как правило, с более сложными объектами: содержащими две, три и более емкостей, имеющими емкость, распределенную по большой длине; имеющими несколько регулируемых параметров, несколько типов возмущений и т.п. К основным типам сложных объектов можно отнести многоемкостные объекты и объекты с распределенной по длине емкостью.
Для сложных регулируемых объектов их статические и динамические свойства обычно оцениваются по экспериментально снятым характеристикам.
Многоемкостные объекты. Многоемкостные объекты содержат две, три и более емкостей, соединенных последовательно, и по своей структуре представляют цепь последовательно соединенных одноемкостных объектов.
Многоемкостные объекты, так же как и одноемкостные, могут иметь свойства самовыравнивания или быть астатическими. Если в цепи последовательно соединенных звеньев объекта хотя бы одно звено не имеет самовыравнивания, то и весь объект в целом является астатическим.
Характерной особенностью динамических свойств объекта, имеющих две и более емкостей, является то, что сразу после нанесения возмущения не происходит заметного изменения выходного параметра. Если у одноемкостных объектов начальная скорость изменения параметра является максимальной, то у многоемкостных скорость отклонения регулируемого параметра после нанесения возмущения начинает постепенно возрастать от нуля и достигает своей наибольшей величины лишь спустя некоторое время. Поэтому у многоемкостных объектов по сравнению с одноемкостными отклонение параметра при прочих одинаковых условиях отстает во времени. Это отставание, вызванное наличием нескольких емкостей, называют переходным запаздыванием tп. Переходное запаздывание тем больше, чем больше число последовательно соединенных емкостей в объекте и чем больше величины отдельных емкостей. Помимо переходного запаздывания τп с ростом числа емкостей растет и транспортное время запаздывания τ0.
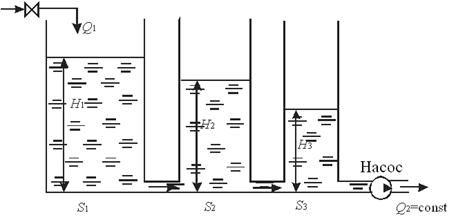
Многоемкостные статические объекты. Примером такого объекта служит последовательное соединение гидравлических емкостей (рис. 4.8).
На рис 4.9 представлены разгонные характеристики многоемкостного статического объекта в зависимости от числа емкостей. Из этого рисунка видно, что с увеличением числа емкостей время переходного и транспортного запаздывания (tп и τ0) увеличивается.
 | Рис. 4.8. Многоемкостный статический объект |
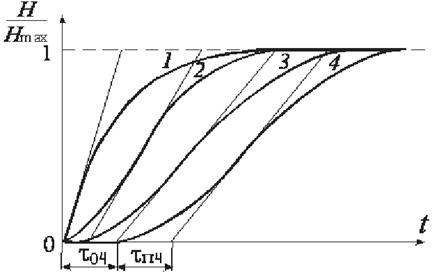 | Рис. 4.9. Разгонные характеристики многоемкостного статического объекта: 1 – 4 – число емкостей |
У некоторых сложных объектов изменение параметра может отставать по времени не только из-за наличия переходного запаздывания, но и потому, что объект содержит звено с транспортным (чистым) запаздыванием. Тогда полное время запаздывания объекта будет составлять сумму времени чистого t0 и переходного tп запаздывания:
 . (4.15)
. (4.15)
На рис. 4.10 представлена разгонная характеристика многоемкостного объекта при воздействии на входе (m).
| Рис. 4.10. Разгонная характеристика многоемкостного статического объекта |
Величина чистого (транспортного) времени запаздывания t0 определяется отрезком времени от момента нанесения возмущения t 0 до момента, когда параметр начинает изменяться, а величина переходного запаздывания tп определяется отрезком времени, который отсекает от оси времени касательная, проведенная к кривой в точке, где скорость изменения параметра достигает наибольшего значения (точка А – точка перегиба кривой разгона). Отрезок времени, полученный проекцией касательной между начальным и установившимся значениями параметра на ось времени, принимается за постоянную времени Т об при замене многоемкостных объектов простыми звеньями.
Замена многоемкостного статического объекта простейшими звеньями. Расчетное определение динамических свойств сложных объектов оказывается слишком приближенным или вообще невозможным.
Сложные регулируемые объекты описываются дифференциальными уравнениями высоких порядков. Составление таких уравнений и пользование ими представляют собой сложную задачу. Поэтому при решении большинства технических задач, не требующих особенно высокой точности, сложный объект обычно заменяют более простыми звеньями, у которых разгонная характеристика достаточно близко совпадает с характеристикой рассматриваемого объекта. Уравнение заменяющих звеньев служит упрощенным уравнением сложного объекта. Таким образом, определение динамических свойств сложного объекта заключается чаще всего в определении коэффициентов уравнения объекта по его экспериментальным динамическим характеристикам. Знание этих коэффициентов необходимо при исследовании систем регулирования и, в частности, при выборе параметров настройки регуляторов.
Замена сложного статического объекта одноемкостным звеном с запаздыванием. Простейший и наиболее распространенный способ составления упрощенного уравнения многоемкостного статического объекта состоит в замене этого объекта двумя простейшими звеньями – одноемкостным статическим объектом (инерционным звеном первого порядка) и звеном с запаздыванием. При этом все запаздывание в объекте принимают за чистое запаздывание (рис. 4.11).
| Рис. 4.11. Замена сложного статического объекта одноемкостным звеном с запаздыванием: 1 – звено с запаздыванием; 2 – одноемкостный статический объект |
Сложный объект можно представить последовательным соединением звена с запаздыванием и одноемкостного статического объекта с известными передаточными функциями:
Передаточная функция простейшей модели объекта равна
 , (4.16)
, (4.16)
откуда уравнение модели в операторной форме будет
 ,
,
а в дифференциальном виде
 . (4.17)
. (4.17)
Рассмотренная замена сложного объекта является наиболее простой и наглядной, достаточно широко используется, но при более точных исследованиях дает грубое приближение. Более точно многоемкостный объект может быть заменен моделью второго порядка (или двухемкостным инерционным звеном с запаздыванием):
 , (4.18)
, (4.18)
где tо – время чистого (транспортного) запаздывания; Т о1 и Т о2 – постоянные времени заменяющих звеньев. Существуют методы расчета этих постоянных времени.
Объекты с распределенной по длине емкостью. Среди регулируемых объектов встречаются такие, у которых емкость распределена по сравнительно большой длине. Такое распределение оказывает существенное влияние на динамические свойства объекта. Рассмотрим качественно это влияние на примере разгонных характеристик двух объектов: ресивера, как объекта с сосредоточенной емкостью (одноемкостный объект) и воздуховода, имеющего тот же объем, что и ресивер, но емкость распределена по длине (рис. 4.12).
 |  | |
| а | б | |
| Рис. 4.12. Объекты регулирования: а – ресивер с сосредоточенной емкостью; б – воздуховод с распределенной емкостью | ||
При изменении притока воздуха Q 1 давление р 2 в ресивере будет сразу изменяться во всем объеме (рис.4.13).
| Рис. 4.13. Разгонные характеристики объектов: 1 – ресивер; 2 – воздуховод |
В воздуховоде (объекте с распределенной по длине емкостью) требуется время на транспортировку увеличенного расхода воздуха на расстояние. Перетекание газа из одного участка воздуховода к другому сопряжено с преодолением гидравлического сопротивления. Поэтому каждый элемент воздуховода является как бы самостоятельной емкостью, включенной последовательно с такими же элементами. Следовательно, объект с распределенной по длине емкостью можно рассматривать как последовательное соединение бесконечно большого числа малых емкостей. Судя по разгонной характеристике (рис. 4.13), объекты с распределенной по длине емкостью можно отнести к сложным многоемкостным статическим объектам.
Распределенной по длине может быть емкость, в которой происходит накопление не только вещества, но и энергии. Например, пароперегреватели котлов, экономайзеры и другие теплообменники змеевикового типа, у которых тепловая емкость металла труб распределена по всей длине змеевика. Любые изменения на входе (например, впрыск воды в пароохладитель пароперегревателя) приведут к перераспределению температуры металла по длине, поэтому выходная величина (температура пара на выходе) будет изменяться не сразу, а через значительное время запаздывания.
Многоемкостные астатические объекты. Примером такого объекта является последовательное соединение гидравлических емкостей (рис. 4.14).
| Рис. 4.14. Многоемкостный астатический объект |
В этом объекте уровень воды в баках не влияет ни на приток Q 1, ни на потребление Q 2. Изменение уровня воды в каждом последующем баке будет отставать во времени по сравнению с изменением уровня в первом баке (рис. 4.15)
| Рис. 4.15. Разгонная характеристика многоемкостного астатического объекта: 1 - 4 – число емкостей |
В этом объекте также с увеличением числа емкостей время переходного запаздывания увеличивается. При наличии в объекте чистого (транспортного) запаздывания полное запаздывание так же, как и в многоемкостных статических объектах (4.15), представляет собой сумму чистого и переходного запаздывания.
На рис. 4.16 представлены разгонная характеристика многоемкостного астатического объекта в относительных единицах и метод простейшей замены сложного объекта последовательным соединением одноемкостного астатического объекта и звена с запаздыванием.
| Рис. 4.16. Разгонная характеристика многоемкостного астатического объекта: 1 – звено с запаздыванием; 2 – одноемкостный астатический объект |
Многоемкостный астатический объект можно заменить последовательным соединением двух звеньев с передаточными функциями:  и
и  .
.
Передаточная функция модели будет
 , (4.19)
, (4.19)
 . (4.20)
. (4.20)
Постоянная времени (время разгона) Т об отсчитывается от момента, соответствующего концу полного запаздывания.
Наиболее благоприятными с точки зрения автоматизации являются простейшие одноемкостные объекты. Чем больше самовыравнивание объекта, тем больше при прочих равных условиях будут отклонения параметра в процессе регулирования. Инерционность одноемкостного объекта, обусловленная его аккумулирующей способностью, также является свойством, благоприятным для регулирования, так как она снижает требования к быстродействию регулятора.
Для сложных объектов их свойства, в отличие от одноемкостных объектов, характеризуются не только инерционностью и самовыравниванием, но также и запаздыванием. Важным показателем при оценке свойств сложных объектов является не столько абсолютное значение запаздывания tоб, сколько отношение времени запаздывания к постоянной времени Т об (tоб/ Т об). Чем больше это отношение, тем труднее обеспечить качественное регулирование параметра.








