 2014-02-02
2014-02-02 4003
4003Рис. 4.7.17. Схема дифракционного метода измерений
Рис. 4.7.13. Коллиматорный метод измерений
При контроле отклонений от прямолинейности направляющих зрительную трубу с окулярным микрометром устанавливают в центре знака, закрепляющего монтажную ось. На другом конце устанавливают визирную марку. Окулярный микрометр ставят на нуль, и трубу наводят на марку. На ближайшей к инструменту секции на тележке, касающейся точками контактирования выверяемой поверхности, устанавливают коллиматор и совмещают при помощи окулярного микрометра изображение штрихов сетки коллиматора с сеткой нитей зрительной трубы. Взяв отсчет по окулярному микрометру, определяют сначала малый угол q, а затем вычисляют величину отклонения этого участка от створа оси.
Передвигая коллиматор вперед, чтобы на место передней точки касания установилась задняя, как и ранее, совмещают сетки и определяют отклонения на последующих участках.
Основное достоинство коллиматорного метода измерений заключается в том, что точность измерения отклонения в принципе не зависит от расстояния до наблюдаемых точек. Однако практически при больших удалениях коллиматора от зрительной трубы ухудшаются условия наблюдений и увеличивается ошибка измерения угла отклонения q, вследствие чего несколько снижается точность метода.
Исследования показывают, что в благоприятных условиях видимости при расстоянии до 400 м средняя квадратическая погрешность измерения угла q одним приемом составляет примерно 0,7 – 1,0 ", а среднего из трех-четырех приемов – 0,5", что при базе b = 2 000 мм дает ошибку определения смещения у около 5 мкм.
Дифракционные и интерференционные методы контроля при выверке оборудования [134, 176, 192, 243]. Высокую точность, сочетающуюся с максимальной простотой аппаратуры для измерений отклонений от прямолинейности, обеспечивает схема, основанная на явлениях дифракции и интерференции света, излучаемого узкой щелью или малым отверстием, проходящего через экран с двумя узкими параллельными щелями или малыми отверстиями.
Пучок света от точечного источника после прохождения узкой щели d1 марки M1 (рис. 4.7.17) попадает на спектральную двухщелевую марку M2. Вследствие влияния дифракции световые волны, идущие от щелей d2 и d2¢, заходят в область геометрической тени и при надлежащем выборе ширины щелей и расстояний между ними будут перекрываться между собой. Так как оба пучка являются когерентными, то в результате их взаимодействия в плоскости экрана возникнет интерференционная картина, которая рассматривается наблюдателем.
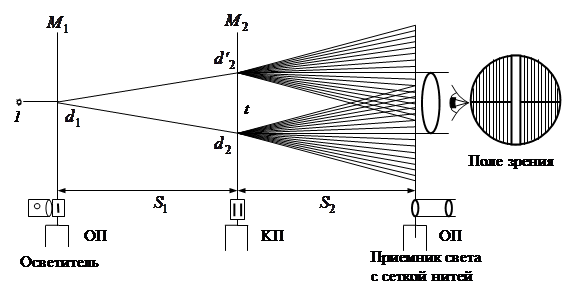 |
Первой из трех точек системы, определяющей створ, является однощелевая марка с вертикальной щелью. Второй точкой системы является точка пересечения плоскости двухщелевой марки с осью симметрии. Третья точка для створных измерений задается экраном с биссектором (приемник света с сеткой нитей).
Совместив центральную полосу картины интерференции с осью биссектора экрана путем перемещения двухщелевой марки в направлении, перпендикулярном заданному створу, располагают все три точки в одной вертикальной плоскости. Величина перемещения двухщелевой марки и определяет нестворность контролируемой точки.
В комплект дифракционного прибора, разработанного МИИГАиК, входят осветитель, марка с одиночной щелью, марка с двумя щелями и приемник дифракционного света в виде лупы с сеткой нитей.
Ширину щелей спектральной марки и расстояние между ними рассчитывают в зависимости от желаемой ширины интерференционных полос, их числа, дальности наблюдений.
Дифракционный метод измерений обеспечивает высокую точность контроля отклонений от прямолинейности (погрешность 20 – 30 мкм при длине створа до 100 м).
Микротелескопами называют высокоточные оптические приборы, имеющие телескопическую систему и микроскоп вместо окуляра. Микротелескопы применяют при монтаже преимущественно для контроля отклонений от прямолинейности, соосности и перпендикулярности осей и плоскостей машин и механизмов.
Алиниометры не имеют горизонтального и вертикального кругов, снабжены зрительной трубой большого увеличения, накладным уровнем, а также окулярным или оптическим микрометром..
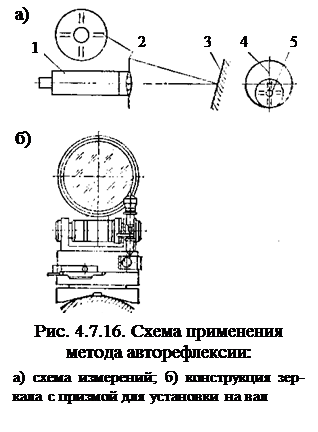
Методы автоколлимации и авторефлексии. Автоколлимацией называется получение изображения, образованного пучками параллельных лучей, вышедших из автоколлимационной трубы 1 и отраженных плоским зеркалом 2или другим отражателем (прямоугольным двойным и тройным зеркалами,
рис. 4.7.15). Поворот зеркала вызывает отклонение отраженного пучка лучей на двойной угол, вследствие чего в фокальной плоскости трубы образуется смещение автоколлимационного изображения.
Если зеркало перпендикулярно оптической оси объектива, то изображение совпадает с перекрестием. При наклоне зеркала на угол a изображение смещается на величину a = 2 faktga (рис. 4.7.15).Для определения величины а, а следовательно, и угла наклона зеркала автоколлиматор обычно снабжают окулярным микрометром.
Метод автоколлимации применяют в прецизионном машиностроении, инженерной геодезии и при монтаже для контроля отклонений от прямолинейности и параллельности направляющих, перпендикулярности вертикальных плоскостей, взаимного расположения узлов оборудования и отдельных агрегатов. Схемы некоторых способов применения этого метода оптических измерений приведены в [192].






















































Современные автоколлиматоры изготовляют с визуальным и фотоэлектрическим отсчетом (АФ-1 и АФ-2), а также с автоматической установкой и отсчетом.
 Для измерений методом автоколлимации с визуальным отсчетом применяюттакже и другие оптические приборы общего и специального назначения, оснащенные соответствующими приспособлениями (зеркальными марками и автоколлимационным окуляром). К таким приборам относят вышеописанные трубы ППС-11, ППС-12, стапельный визир ВС-2 (ИГ-96) и др. Отечественная промышленность выпускает также автоколлимационные теодолиты 2Т2А, 3Т2КА, Т5А и др.
Для измерений методом автоколлимации с визуальным отсчетом применяюттакже и другие оптические приборы общего и специального назначения, оснащенные соответствующими приспособлениями (зеркальными марками и автоколлимационным окуляром). К таким приборам относят вышеописанные трубы ППС-11, ППС-12, стапельный визир ВС-2 (ИГ-96) и др. Отечественная промышленность выпускает также автоколлимационные теодолиты 2Т2А, 3Т2КА, Т5А и др.
Среди лазерных средств контроля различают системы задания направления, створных измерений, нивелирования, контроля отклонений от прямолинейности, соосности, плоскостности и перпендикулярности, измерения углов, а также универсальные системы.
Большинство простейших лазерных измерительных систем создано на базе традиционных оптических приборов, в основном, геодезических. Число лазерных геодезических приборов, применяемых при контроле монтажа технологического оборудования, трубопроводов и конструкций, непрерывно возрастает во всех странах.
Современные специализированные лазерные измерительные системы для контроля геометрических параметров представляют собой оптико-электронные устройства, состоящие из ряда типовых блоков и специальной установочной оснастки для базирования приборов.
Лазерные геодезические приборы, применяемые при монтаже и контроле строительных конструкций, машин и агрегатов в зависимости от вида геодезических работ, выполняемых с их применением, делят нa четыре группы: визиры, приборы вертикального проектирования, нивелиры и теодолиты.
Лазерными визирами называют приборы, позволяющие задавать оптическим лучом определенное направление в пространстве – опорную линию (реперную ось), относительно которой производят необходимые измерения.
Лазерные нивелиры и лазерные теодолиты получили большое распространение для контроля прямолинейности и плоскостности строительных конструкций и некоторых видов технологического оборудования.
Лазерные приборы вертикального проектирования и отвесы могут также использоваться для контроля прямолинейности вертикальных строительных конструкций, вертикальных направляющих путей, машин и агрегатов с продольной вертикальной осью. Большинство отечественных лазерных приборов вертикального проектирования создано на основе других лазерных приборов, снабженных призменными насадками или системой зеркал для изменения горизонтального направления лазерного пучка на вертикальное.
10. Схемы (программы) створных измерений – целого створа, полуствора, четвертьствора.
В зависимости от размеров и конструктивных решений сооружений, наличия приборов, необходимой точности контроля перемещений, створные измерения выполняются по определенным схемам построения створных линий
(в некоторых изданиях – программам), под которыми понимают определенную последовательность действий. В практике высокоточных створных измерений наибольшее применение находят схемы полного створа, общего створа, полуствора, четвертьствора, последовательных створов, малых створов, малых створов и полигонометрического хода и др.
В схеме полного створа (рис. 4.3.11) нестворность q каждой точки относительно общего створа определяется в прямом и обратном направлениях, т. е. дважды (при постановке прибора на обоих концах створа).
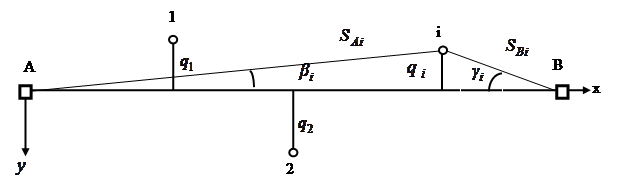
Рис. 4.3.11. Схема полного створа
Программа наблюдений состоит в измерении нестворности в каждой точке при круге право и круге лево в ходах прямого и обратного направлений. Наблюдения при двух кругах производят с целью исключения возможного эксцентриситета в положении визирной оси створного прибора относительно его основной оси вращения и уменьшения влияния ошибки фокусирования зрительной трубы.
Величину нестворности q любой точки, например точки i, определяют по формуле
 , (4.3.12)
, (4.3.12)
где  – величина нестворности, измеренная с точки А;
– величина нестворности, измеренная с точки А;
 – величина нестворности, измеренная с точки В;
– величина нестворности, измеренная с точки В;
 – веса измерений.
– веса измерений.
Среднюю квадратическую погрешность (СКП) средневесового результата отклонения из прямого и обратного ходов определяют по формуле:
 , (4.3.13)
, (4.3.13)
где  – СКП определения нестворности из прямого хода;
– СКП определения нестворности из прямого хода;
 – СКП определения нестворности из обратного хода.
– СКП определения нестворности из обратного хода.
Величины  вычисляются по формулам:
вычисляются по формулам:
‑ для способа малых углов:
 |
где  и
и  – СКП измерения малого угла соответственно с точки А и точки В, вычисляемые по формуле погрешности среднего арифметического из n приемов
– СКП измерения малого угла соответственно с точки А и точки В, вычисляемые по формуле погрешности среднего арифметического из n приемов
 ; (4.3.15)
; (4.3.15)
|

где  – угловая СКП ориентирования створа, т. е. погрешность визирования на неподвижную марку,
– угловая СКП ориентирования створа, т. е. погрешность визирования на неподвижную марку,
 – угловая СКП введения подвижной марки в створ,
– угловая СКП введения подвижной марки в створ,
 – угловая величина ошибки проектирования.
– угловая величина ошибки проектирования.
Однако более достоверное значение погрешностей определения отклонений контрольных пунктов можно получить по разностям отклонений, полученных из прямого и обратного ходов
 , (4.3.17)
, (4.3.17)
где  ;
;  – число разностей, при этом знак
– число разностей, при этом знак  меняется на обратный.
меняется на обратный.
К положительным сторонам программы полного створа измерений следует отнести относительную быстроту измерений, так как прибор переносят лишь один раз с одного опорного пункта на другой, и простоту обработки результатов измерений.
К недостаткам программы следует отнести:
- необходимость постоянной видимости по всему створу;
- низкую точность измерения отклонений при больших линиях визирования, что заставляет часто делать много приемов измерений;
- очень низкую точность взаимного положения соседних контрольных знаков, особенно в центральной области створа, так как отклонения каждого знака определяются независимо относительно общего створа.
Последнее обстоятельство является самым уязвимым местом при назначении данной программы измерений, так как допуски на взаимное положение контрольных знаков всегда меньше допусков на абсолютные перемещения.
Поэтому данную программу применяют при небольших створах, когда достичь заданную точность контроля можно не производя большого объема работ.
Для уменьшения влияния погрешностей визирования, которые прямо пропорциональны расстоянию, М.С. Муравьев на Цимлянском гидроузле предложил разбивать створ АВ на «полустворы» и «четвертьстворы».
При измерениях по программе полустворов работу начинают с определения нестворности центральной точки 4 (рис. 4.3.13) из прямого и обратного ходов относительно створа А-В. Затем определяют нестворности точек 1, 2, 3 относительно полуствора А-4 и нестворности точек 5, 6, 7 относительно полуствора 4-В.
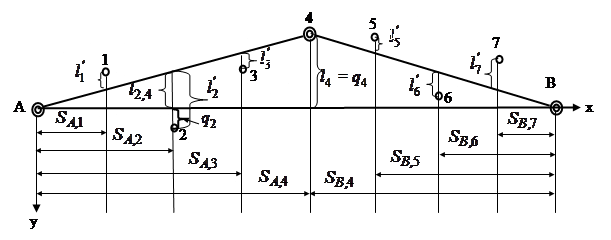
Рис. 4.3.13. Схема полуствора
Величину нестворности любой промежуточной точки, например 2, в схеме полуствора (рис. 4.3.13) определяют по формуле:
 , (4.3.20)
, (4.3.20)
где  – величина нестворности точки 2 относительно полного створа;
– величина нестворности точки 2 относительно полного створа;
 – величина нестворности точки 2 относительно полуствора А-4, определяемая по формуле (4.3.13);
– величина нестворности точки 2 относительно полуствора А-4, определяемая по формуле (4.3.13);
 . (4.3.21)
. (4.3.21)
Оценка точности определения нестворности точки в программе полуствора производится по формуле
 , (4.3.22)
, (4.3.22)
где  – СКП определения нестворности точки 2 относительно полного створа А-В;
– СКП определения нестворности точки 2 относительно полного створа А-В;
 – СКП определения нестворности точки 2 относительно полуствора А-4, вычисляемая по формуле (4.3.13);
– СКП определения нестворности точки 2 относительно полуствора А-4, вычисляемая по формуле (4.3.13);
 – расстояния между точками, указанными в литерах.
– расстояния между точками, указанными в литерах.
В рассмотренной программе увеличивается объем работы, связанный с дополнительными переносами прибора и увеличением числа измеряемых нестворностей, а также дополнительными вычислениями. Однако точность взаимного положения точек будет выше, чем в программе полного створа, что очень важно при контроле смещений сооружений и их частей.
В программе четвертьствора, как и в программе полуствора, сначала определяют величину нестворности центральной точки 4 (рис. 4.3.14) из прямого и обратного ходов относительно створа А-В. Затем по аналогичной программе определяют величины нестворностей центральных точек соответственно 2 и 6 относительно полустворов А-4 и В-4; затем определяют величины нестворностей промежуточных точек относительно четвертьстворов А-2, 2-4, 4-6, 6-В.

Величину нестворности q любой точки, например 1, в схеме четвертьствора (рис. 4.3.14) определяют по формуле:
 , (4.3.23)
, (4.3.23)
где  – величина нестворности точки 1 относительно створа А-В;
– величина нестворности точки 1 относительно створа А-В;
 – величина нестворности точки 1 относительно четвертьствора А-2, вычисляемая по формуле (4.3.13);
– величина нестворности точки 1 относительно четвертьствора А-2, вычисляемая по формуле (4.3.13);
 , (4.3.24)
, (4.3.24)
 . (4.3.25)
. (4.3.25)
Величину смещения определяют как разность нестворностей последующего и первого циклов измерений.
Оценку точности величины нестворности производят по формуле
 , (4.3.26)
, (4.3.26)
где  – СКП определения величины нестворности точки 1 относительно четвертьствора А-2, вычисляемая по формуле (4.3.13);
– СКП определения величины нестворности точки 1 относительно четвертьствора А-2, вычисляемая по формуле (4.3.13);
 – СКП определения величины нестворности точки 2 относительно полуствора А-4, вычисляемая по формуле (4.3.22);
– СКП определения величины нестворности точки 2 относительно полуствора А-4, вычисляемая по формуле (4.3.22);
 – СКП определения величины нестворности точки 4 относительно створа А-В, вычисляемая по формуле (4.3.13);
– СКП определения величины нестворности точки 4 относительно створа А-В, вычисляемая по формуле (4.3.13);
 – расстояния между точками, указанными в литерах.
– расстояния между точками, указанными в литерах.
В рассмотренной программе значительно увеличивается объем работы, связанный с дополнительными переносами прибора и увеличением числа измеряемых нестворностей, а также дополнительными вычислениями. Однако точность взаимного положения точек будет выше, чем в программе полуствора
и полного створа, что очень важно при контроле смещений сооружений и их частей.
Программа последовательных створов (рис. 4.3.15), предложенная Г.П. Левчуком для выверки оборудования промышленных предприятий, нашла, благодаря своим высоким точностным показателям, успешное применение при контроле смещений сооружений гидроузлов.
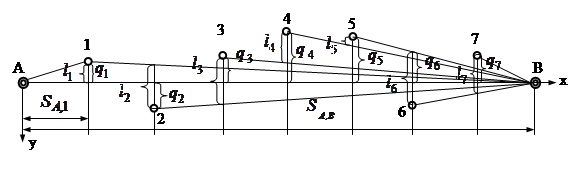
Рис. 4.3.15. Схема последовательных створов
Для получения точных результатов в этой схеме необходимо также свести к минимуму погрешности центрирования приборов и визирных марок, а также использовать створные приборы, в которых перефокусирование зрительной трубы вызывало бы пренебрегаемо малую погрешность, во всяком случае, ее влияние не должно превышать ошибки визирования.
Применительно к наблюдениям за горизонтальными смещениями схема и программа последовательных створов состоят в следующем. В створе, разделенном на п примерно равных частей, устанавливают в начальном опорном пункте теодолит, в конечном пункте – визирную марку. От общего створа А-В измеряют при двух положениях круга только отклонение  точки 1 (рис. 4.3.15). Затем прибор переносят в эту точку, устанавливая его вместо марки, и относительно створа 1-В измеряют нестворность
точки 1 (рис. 4.3.15). Затем прибор переносят в эту точку, устанавливая его вместо марки, и относительно створа 1-В измеряют нестворность  точки 2. Прибор переносят в точку 2 и от створа 2-В измеряют нестворность
точки 2. Прибор переносят в точку 2 и от створа 2-В измеряют нестворность  точки 3 и т. д. Дойдя до конечной точки, производят измерения в обратном направлении. Установив теодолит в пункте В,а визирную марку – в пункте А, относительно створа В-А наблюдают отклонение точки 7. Перейдя с прибором в эту точку, от створа 7-А находят нестворность точки 6 и т. д. Таким образом, в этой схеме прибор последовательно устанавливают на все наблюдаемые точки створа, ориентируют по конечному наблюдательному пункту и относительно последовательно измеряемого створа измеряют нестворность ближайшей по ходу наблюдаемой точки.
точки 3 и т. д. Дойдя до конечной точки, производят измерения в обратном направлении. Установив теодолит в пункте В,а визирную марку – в пункте А, относительно створа В-А наблюдают отклонение точки 7. Перейдя с прибором в эту точку, от створа 7-А находят нестворность точки 6 и т. д. Таким образом, в этой схеме прибор последовательно устанавливают на все наблюдаемые точки створа, ориентируют по конечному наблюдательному пункту и относительно последовательно измеряемого створа измеряют нестворность ближайшей по ходу наблюдаемой точки.
Средневесовая величина нестворности определяется по формуле
 , (4.3.27)
, (4.3.27)
где – нестворность точки i, полученная из прямого хода с опорного пункта А;
– нестворность точки i, полученная из обратного хода с опорного пункта В;
 – СКП определения нестворностей соответственно из прямого и обратного ходов.
– СКП определения нестворностей соответственно из прямого и обратного ходов.
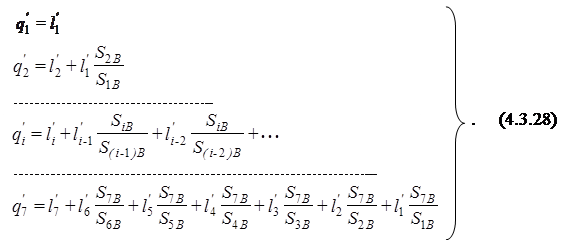 |
Приведение измерений к общему створуА-В в прямом ходе выполняют по формулам, которые выводят непосредственно с рисунка.
Подобным образом выполняется приведение результатов измерений в обратном ходе.
Средняя квадратическая погрешность отклонения точки в прямом ходе вычисляется по формуле
 . (4.3.29)
. (4.3.29)
Средняя квадратическая погрешность средневесового отклонения от створа А-В вычисляется по формуле
 . (4.3.32)
. (4.3.32)
По сравнению с схемами полустворов и четвертьстворов в схеме последовательных створов более полно выравнивается точность определения нестворностей. Так, в схеме на рис. 4.3.15 погрешность наиболее слабой средней точки лишь в  раз превосходит ошибки крайних точек. Исследованиями также установлено, что чем длиннее створ, тем эффективнее применять схему последовательных створов с коротким шагом измерений.
раз превосходит ошибки крайних точек. Исследованиями также установлено, что чем длиннее створ, тем эффективнее применять схему последовательных створов с коротким шагом измерений.
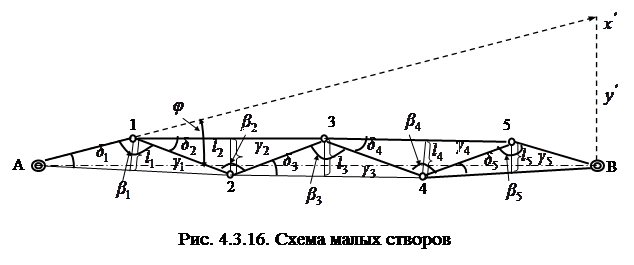
Для условий плохой видимости по всему створу В.М. Гудковым и Б.И. Беляевым [80] была предложена схема малых створов.
В схеме малых створов измерения сводятся к последовательному определению отклонений каждого пункта от створа двух соседних (рис. 4.3.16).
В прямом ходе прибор устанавливают в пункте А, визирную марку – в точке 2 и от створа А-2 измеряют отклонение точки 1. Прибор переносят в точку 1, визирную марку – в точку 3 и от створа 1-3 определяют нестворность точки 2. Соответственно от створа 2-4 измеряют отклонение точки 3 и т. д. Заканчивают прямой ход определением отклонения точки 7 от створа 6-В. В обратном ходе теодолит устанавливают на пункте В, визирную марку – в точке 6 и относительно створа В-6 измеряют нестворность точки 7, от створа 7-5 – точки 6 и так до пункта А.
При больших величинах нестворностей точек применяют способ малых углов, при незначительных отклонениях – метод подвижной марки. В случае применения способа подвижной марки в каждом вытянутом треугольнике, образованном из соседних пунктов, по величинам частных нестворностей вычисляют малые углы 
 (4.3.33)
(4.3.33)
По малым углам в каждом вытянутом треугольнике вычисляют углы поворота створного хода
 (4.3.34)
(4.3.34)
Принимают частную систему координат х'у', начало которой совмещают
с пунктом А, а ось х' направляют вдоль линии А-1. В этой системе сначала вычисляют дирекционные углы сторон
 , (4.3.35)
, (4.3.35)
и ординаты точек створа
 . (4.3.36)
. (4.3.36)
Вычисляют угол разворота створа А-В в системе 
 (4.3.37)
(4.3.37)
Переходят от системы координат к системе координат общего створа xy. Для этого перевычисляют сначала дирекционные углы
 , (4.3.38)
, (4.3.38)
а затем определяют ординаты точек хода, т. е. нестворности относительно общего створа
 (4.3.39)
(4.3.39)
Для конечной точки створа В можно записать
YВ = невязке хода =  (4.3.40)
(4.3.40)
Невязку хода сравнивают с допустимой, равной удвоенной средней квадратической погрешности, и разбрасывают пропорционально длинам линий.
Среднюю квадратическую погрешность нестворности в середине створа определяют по формуле [80]
 (4.3.41)
(4.3.41)
где m – СКП измерения малого угла.
Как видно из формулы (4.3.41), в схеме малых створов происходит очень быстрое накопление погрешностей по створу, что является основным его недостатком. Однако незначительные погрешности взаимного положения соседних пунктов будут определены с меньшими значениями, чем в других рассмотренных схемах, что, несомненно, является большим его достоинством.








