 2014-02-02
2014-02-02 5411
5411Практическая пригодность САУ, определяется ее устойчивостью и приемлемым качеством процесса управления (регулирования). На любую САУ действуют различные внешние возмущения, которые могут нарушать ее нормальную работу. Правильно спроектированная система должна устойчиво работать при всех внешних возмущениях.
В простейшем случае, понятие устойчивость системы связана со способностью ее возвращения к исходному состоянию после кратко-временного внешнего воздействия. Если система неустойчивая, она не возвращается к состоянию равновесия, из которого по каким-то причинам вышла.
Если шарик (рис. 4.1а), лежащий на дне чаши переместить на ее стенку и отпустить, то после нескольких колебаний он возвратится в исходное положение. Это пример устойчивой системы. Система называется нейтральной, если после снятия возмущающего воздействия она приходит в состояние равновесия, но не первоначальное, т.е. равновесие наступает при произвольном значении выходной координаты системы. Например, шарик, катящийся по горизонтальной плоскости (рис. 4.1б). Если под возмущающим воздействием отклонить шарик от равновесного положения и он никогда не возвращается в первоначальное положение, то такая система называется неустойчивой (рис.4.2в).
Рис. 4.1 Пример на устойчивости предмета.
Необходимым и достаточным условием устойчивости линейной системы автоматического регулирования является отрицательность вещественных частей всех корней ее характеристического уравнения.
Характеристическое уравнение может быть получено из передаточной функции замкнутой системы, связывающей любые ее вход и выход, путем приравнивания нулю знаменателя передаточной функции.
Рис. 4.3 Функциональная схема замкнутой системы
Если передаточная функция разомкнутой системы  , где K(P) и D(P) полиномы степеней соответственно m и n (mn), то передаточная функция замкнутой системы (рис. 4.3)
, где K(P) и D(P) полиномы степеней соответственно m и n (mn), то передаточная функция замкнутой системы (рис. 4.3)

Характеристическое уравнение замкнутой системы K(P)+D(P)=0 или A(P)=anpn+an-1pn-1+...+a0=0. С увеличением порядка характеристического уравнения усложняется определение корней уравнения. В теория автоматического управление (ТАУ) пользуются условиями, которые позволяют судить о расположении корней в левой полуплоскости без нахождения их значений; эти условия называются критериями устойчивости. Существующие критерии устойчивости делятся на две группы: алгебраические и частотные критерии.
Создание алгебраических критериев устойчивости связано с именами английского математика Рауса (1877г.) и швейцарского математика Гурвица (1895г.). Эти критерии связаны между собой и при анализе устойчивости приводят к одним и тем же алгебраическим неравенствам. Поэтому их иногда объединяют под общим названием критерия Рауса-Гурвица.
Частотные критерии устойчивости позволяют судить об устойчивости САУ по виду их частотных характеристик. Эти критерии позволяют сравнительно легко исследовать устойчивость систем высокого порядка, а также имеют простую геометрическую интерпретацию и наглядность.
Критерий устойчивости А.В. Михайлова (1938г.) позволяет судить об устойчивости системы на основании рассмотрения некоторой кривой, называемой кривой (годографом) Михайлова.
Устойчивость САУ – необходимое, но не достаточное свойство. Устойчивая система при отработке различных воздействий может оказаться недостаточно точной, переходные процессы управления в ней могут затухать медленно, с большими или малыми отклонениями регулируемого параметра от заданного значения. Все эти и другие факторы отражают так называемое качество процесса управления и требуют специального исследования, т.е. не менее важной является проблема качества процессов регулирования.
Под качеством процесса регулирования понимают способность автоматического регулятора поддерживать с достаточной точностью заданный закон изменения регулируемого параметра. Качество процесса регулирования тем выше, чем меньше отклонение регулируемого параметра от заданного значения и чем быстрее достигается заданный установившийся режим.
Наиболее распространенными критериями качества в автоматике являются: статическая и динамическая ошибки регулирования, время регулирования, степень колебательности, интегральные критерии.
Оценки качества регулирования, полученные на основе анализа графиков переходного процессов в САР при типовых воздействиях, называются прямыми оценками. Оценки качества регулирования, базирующиеся на анализе различных промежуточных характеристик, например на анализе передаточной функции, называются косвенными оценками.
Из графика переходного процесса (рис. 4.9) легко определить некоторые критериии качество, а именно:
- ошибка, остающаяся по окончании переходного процесса;
- перерегулирование;
- время регулирования;
- число колебаний регулируемой величины в заданное время;
- степень колибательности.
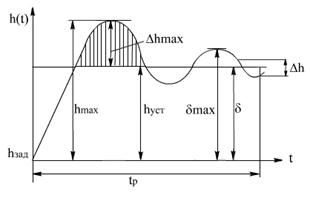
Рис. 4.9 Процесс регулирования с указанием показателей качества регулирования
1) Ошибка, остающаяся по окончании переходного процесса, т.е. ошибка в установившемся режиме работы, которая может состоять из двух составляющих.
Первая составляющая этой ошибки, обусловленная точностью действия отдельных звеньев, зависит от трения, люфтов, зазоров и т.д. Эта составляющая определяет зону нечувствительности САУ.
Следовательно, в установившихся режимах работы величина регулируемого параметра h(t) не будет строго постоянной во времени. В технических требованиях указываются отклонения, например фактического значения регулируемого параметра h от оптимального hуст.
Вторая составляющая рассматриваемой ошибки – максимальная допустимая статическая ошибка макс и (неравномерность регулирования), которая зависит от величины нагрузки в статической системе и равна нулю в астатической.
Статическая ошибка равна разности между установившимся значением регулируемой величины hуст и ее заданным значением hзад. Если статическая ошибка и максимальная допустимая статическая ошибка макс равны нулю, то регулирование и система являются астатическими.
2) Перерегулирование – максимальное отклонение регулируемой величины, которое не должно превышать максимального допустимого значения, т.е. hмакс hдоп. В данном случае фактическое значение регулируемого параметра h(t) в переходном процессе превышает установившееся значение hуст, т.е. в системе имеет место перерегулирование. Максимальная величина перерегулирования hмакс=hмакс-hуст или  (hмакс – максимальное значение регулируемого параметра).
(hмакс – максимальное значение регулируемого параметра).
Максимальные отклонения в переходном процессе регулируемой величины от ее установившегося значения также называют динамическими ошибками hмакс=hдин.
3) Время регулирования tр – это промежуток времени, по истечении которого абсолютная величина |h(t)- hуст| не превышает ширины зоны нечувствительности h.
Практически временем регулирования tр – называют промежуток времени (от начала переходного процесса), в течение которого абсолютная величина переходной ошибки становится меньше допускаемой (обычно она составляет 3-5% установившегося значения регулируемого параметра). Период времени от t1 до t2 и есть время регулирования. Время регулирования tр= t2- t1, или быстродействие САУ, зависит от вида, числа и характера включения звеньев, входящих в данную систему.
4) Число колебаний регулируемой величины в заданное время, которое не должно превышать определенного значения. В связи с этим в некоторых системах должен быть апериодический (монотонный) переходный процесс при минимальном времени протекания, в некоторых системах целесообразнее обеспечивать колебательный переходный процесс, не допуская перерегулирования, т.е. hмакс hдоп
5) С тепень колебательности характеризует характеризует интенсивность затухания колебательного процесса, причем не всего переходного процесса, а наиболее медленно затухающей составляющей (рис.-4.10). Количественной оценкой интенсивности затухания служит степень затухания , определяемая по формуле:  (наиболе часто =0,75-0,9).
(наиболе часто =0,75-0,9).

