 2014-02-02
2014-02-02 978
978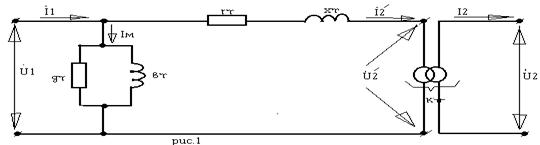 Влияние трансформаторов на режим работы системы учитывается с помощью схемы замещения (Г-образной). Такая схема замещения (Г-образная) для одной фазы двухобмоточного трансформатора показана на рис.1,
Влияние трансформаторов на режим работы системы учитывается с помощью схемы замещения (Г-образной). Такая схема замещения (Г-образная) для одной фазы двухобмоточного трансформатора показана на рис.1,
где r Т= r 1+ r I2 – сумма активного сопротивления первичной обмотки и приведенного к ней (к первичной) активного сопротивления вторичной обмотки;
х Т= х 1+ х I2 – сумма индуктивного сопротивления рассеяния первичной обмотки и приведенного к ней (к первичной) индуктивного сопротивления вторичной обмотки.
r Т и хТ называют активным и индуктивным сопротивлениями трансформатора.
Проводимости g Т и в Т, определяют активную и реактивную слагающие намагничивающего тока трансформатора I m.
Активная составляющая этого тока обусловлена потерями мощности в стали трансформатора, а реактивная определяет магнитный поток взаимоиндукции обмоток трансформатора.
В схему включен идеальный трансформатор, не имеющий сопротивлений и магнитных потоков рассеяния. Соотношение напряжений на его зажимах постоянно и определяется коэффициентом трансформации реального трансформатора в режиме холостого хода.
Обычно идеальный трансформатор в схемах замещения опускается, и расчеты выполняются к приведенным величинам вторичного напряжения U I2 и тока I I2 (см. рис.2 упрощенная схема замещения).
 |
При U £220кВ ветви намагничивания учитываются в виде дополнительной нагрузки потери мощности в стали трансформатора или потери холостого хода.
где D Р хх+ j D Q хх – потери мощности в стали или потери х.х.








