2014-02-02
2014-02-02 735
735Сети Петри
Сети Петри специально разрабатывались для моделирования систем, которые содержат взаимодействующие параллельные компоненты большой сложности.
Впервые сеть Петри предложил Карл Адам Петри (ФРГ) 1962г.
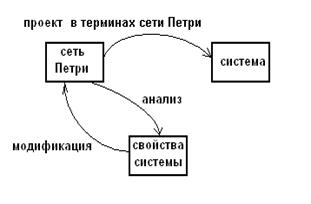
Применение при проектировании и анализе систем (2 подхода).

| 
|
Сеть Петри состоит из четырех компонентов С = (P, T, I, O).
P – множество позиций,
T – множество переходов,
I – входная функция,
O – выходная функция.
Пример сети.
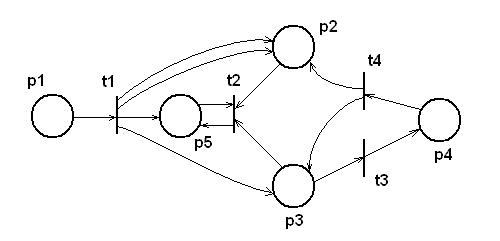
C = (P, T, I, O).
P = {p1, p2, p3, p4, p5} - позиции,
T = {t1, t2, t3, t4} - переходы.
Входная функция показывает, из каких позиций и сколько дуг входит в данный переход.
 I(t1) = {p1},
I(t1) = {p1},
I(t2) = {p2, p3, p5}, p1 … p5 – входные позиции перехода 
I(t3) = {p3},
I(t4) = {p4}.
Выходная функция показывает в какие позиции и сколько дуг выходит из данного перехода.
 O(t1) = {p2, p2, p3, p5},
O(t1) = {p2, p2, p3, p5},
O(t2) = {p5}, p1 … p5 – выходные позиции перехода
O(t3) = {p4},
O(t4) = {p2, p3}.
Расширенные входные и выходные функции (вх/вых функции относительно позиций).
#(tj, I(pi)) = #(pi, O(tj)),
#(tj, O(pi)) = #(pi, I(tj)).
Для рассмотренной сети Петри расширенными входными и выходными функциями являются
I(p1) = {},
 I(p2) = {t1, t1, t4},
I(p3) = {t1, t4}, входные функции
I(p4) = {t3}, позиций
I(p5) = {t1, t2} I(p2) = {t1, t1, t4},
I(p3) = {t1, t4}, входные функции
I(p4) = {t3}, позиций
I(p5) = {t1, t2}
| O(p1) = {t1},
 O(p2) = {t2},
O(p3) = {t2, t3}, выходные функции
O(p4) = {t4}, позиций
O(p5) = {t2}. O(p2) = {t2},
O(p3) = {t2, t3}, выходные функции
O(p4) = {t4}, позиций
O(p5) = {t2}.
|