 2014-02-02
2014-02-02 604
604Дано: схема механизма, w1, G2, G3, Q; Js2
Определить: Мур, действующий на кривошип АВ.
Решение:
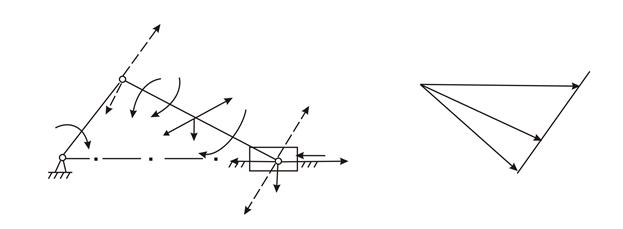
Рис.7.11 Рис. 7.12
1. Находим инерционные факторы, действующие на звенья механизма. Для этого строим план скоростей и ускорений (рис.2 и 3). Инерционные факторы после их определения показываются на схеме механизма:
Ри2=-G2/g∙as2, H
Ри3=-G3/g∙as3, H
Mи2=-Јs2∙abcτ/lbc, H∙м
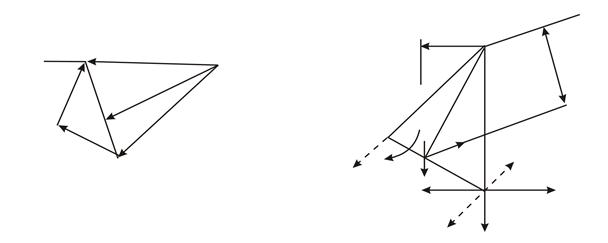
Рис. 7.13 Рис.7.14
2. Строим рычаг Жуковского. Переносим все силы, сохраняя их направления в одноименные точки повернутого плана. Чтобы перенести Ми2 на план скоростей заменим его парой сил, действующих на звено АВ Р' и Р' ' – перпендикулярно.
Для соблюдения размерности следует иметь в виду:
 Ми2=Р1LBC
Ми2=Р1LBC
M`и2=P1×bc = ›M 'u2= M u2∙bc/lBC
3. Определим уравновешивающий момент, запишем сумму моментов относительнолюса р
åМр=Р42× hp42+ P43 × pc43 -Q × pc – G3 × hG3 – M142 +M1yp=0
Плечи сил hp42, hG2 – измеряются непосредственно на плане скоростей.
Определенной М1ур выражается в [нмм]. Для сравнения М1ур с Мур, полученным с помощью метода кинетостатики, момент, полученный по Жуковскому следует перевести в н.м.: Мур[нм.] =M 'ур[H∙мм] ∙LAB[м]/pb[м]








