 2014-02-02
2014-02-02 802
802Контрольные вопросы
ТЕМА: Кинетостатический анализ механизмов
ЛЕКЦИЯ 7
Краткое содержание: Задачи силового расчета типовых механизмов. Силы в кинематических парах без учета трения. Условие статической определимости кинематической цепи. Методы силового кинетостатического расчета: графоаналитическим - методом планов сил; аналитическим – методом проекций на оси координат. Уравновешивающая сила (момент) и ее расчет по Жуковскому Н.Е.
Задачи силового расчета типовых механизмов.
Постановка задачи силового расчета (обратная задача динамики) для исследуемого механизма при известных кинематических характеристиках и внешних силах определить уравновешивающую силу или момент (управляющее силовое воздействие) и реакции в кинематических парах механизма.
Виды силового расчета:
- статический - для механизмов находящихся в покое или движущихся с малыми скоростями, когда инерционные силы пренебрежимо малы, или в случаях, когда неизвестны массы и моменты инерции звеньев механизма (на этапах, предшествующих эскизному проектированию); Уравнения статического равновесия:
 |
где Fi - внешние силы, приложенные к механизму или его звеньям,
Mi- внешние моменты сил, приложенные к механизму или его звеньям.
- кинетостатический - для движущихся механизмов при известных массах и моментах инерции звеньев, когда пренебрежение инерционными силами приводит к существенным погрешностям; Уравнения кинетостатического равновесия:
 |
где Fиi -инерционные силы, приложенные к звеньям, Mиi -моменты сил инерции, приложенные к звеньям.
Силы в кинематических парах без учета силы трения
Сила, как векторная величина характеризуется относительно звеньев механизма тремя параметрами: координатами точки приложения, величиной и направлением. Рассмотрим с этих позиций реакции в КП плоских механизмов.
Рассмотрим низшие кинематические пары.
Вращательная пара. Во вращательной паре 5 класса (рис.7.1) результирующая сила реакции R проходит через центр шарнира 0. Величина и направление этой реакции неизвестны, так как они зависят от величины и направления заданных сил, приложенных к звеньям пары. Можно записать, что R0 = R12 =-R21
Поступательная пара. В поступательной паре (рис.7.2) реакция перпендикулярна к оси движения Х – Х этой пары. Известно ее направление, но не известны координата точки приложения и величина.
Высшие кинематические пары.
В высшей кинематической паре (рис.7.3) реакция направлена по нормали n-n к поверхности в точке соприкосновения звеньев. Следовательно, неизвестной является только величина реакции.
Таким образом, для определения реакции в каждой из низших пар 5 класса необходимо найти по две неизвестных, а для определения реакции в высшей паре 4 класса – только одну неизвестную величину.
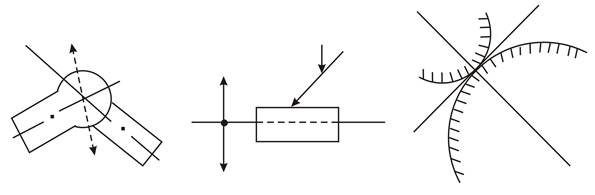
Рис.7.1 Рис.7.2 Рис.7.3
Определение числа неизвестных при силовом расчете.
Для определения числа неизвестных, а, следовательно, и числа независимых уравнений, при силовых расчетах необходимо провести структурный анализ механизма и определить число и классы кинематических пар, число основных подвижностей механизма, число избыточных связей. Чтобы силовой расчет можно было провести, используя только уравнения кинетостатики, необходимо устранить в нем избыточные связи. Так как каждая связь в КП механизма соответствует одной компоненте реакции, то число неизвестных компонент реакций равно суммарному числу связей накладываемых КП механизма. Уравновешивающая сила или момент должны действовать по каждой основной подвижности механизма. Поэтому суммарное число неизвестных в силовом расчете определяется суммой связей в КП механизма и его основных подвижностей
 |
где ns - число неизвестных в силовом расчете.
Условие статической определимости кинематической цепи
Составим условия статистической определимости плоской кинематической цепи. Так как для каждого звена можно написать три уравнения равновесия, то при n звеньев их будет 3n. Учитывая, что реакция каждой низшей пары содержит два неизвестных, уравнение статической определимости для кинематической пары, состоящей из n звеньев с низшими парами, можно записать в виде
3n = 2P5,
где P5 – число низших кинематических пар 5 класса.
Для кинематической цепи, имеющей в своем составе низшие и высшие кинематические пары, уравнение статической определимости принимает вид 3n = 2P5 – P4 =0,
где Р4 – число высших кинематических пар.
Простейшее решение удовлетворяется при n =1, P5 =1, P4 =1. Оба приведенных уравнения статической определимости кинематической цепи совпадают с условиями, которым удовлетворяют группы Ассура. Таким образом, группы Ассура – статически определимые системы, следовательно, силовой расчет целесообразно вести по группам Ассура.
Кинетостатический расчет механизмов методом планов сил
Алгоритм кинетостатического расчета:
1. произвести структурный анализ механизма, записав формулу его строения;
2. произвести кинематическое исследование механизмов с целью определения ускорений;
3. используя принцип Даламбера, составить схемы нагружения отдельных групп Ассура (по силам внешним и силам инерции);
4. силовой расчет начинают с последней, считая по формуле строения механизма группы Ассура; для нее определяют реакции во всех кинематических парах;
5. последовательно приближаясь к начальному звену, рассмотреть равновесие всех остальных групп Ассура;
6. рассмотреть равновесие начального звена с целью определения уравновешивающей силы или момента.
Группа Ассура 2 класса, первого вида (рис.7.4).
Дано: группа Ассура (состоит из звеньв 2, 3). Р2, Р3, М2, М3 (в состав Рi и Мi включены инерционные факторы): реакции в шарнирах А,В,С, т.е. RA, RB, RC.
Решение: Считаем группу Ассура извлеченной из кинематической цепи. При этом воздействия отброшенных звеньев заменяем их реакциями R12, R43. Поскольку величина и направления реакций неизвестны, удобно их представить в виде нормальных и тангенциальных составляющих, которые показываются пунктиром. Представленную систему звеньев с приложенными к ней силовыми факторами (включая и инерционные) называют схемой нагружения.
Составим для данной группы Ассура векторное уравнение равновесия:
å Рi (2,3) = P2 + R12t + R12n + P3 +R43t+R43n =0
В этом уравнении четыре неизвестных; P12t, P12n, P43t, P43n. Величину и направление P12t можно определить, если рассмотреть равновесие второго звена, взяв сумму моментов относительно точки В.
å МВ (2) = Р2hp2 – M2 + R12t LAB =0
где hp2 – плечо для силы Р2, определяемое графически.
R12t = ±(М2-Р2hp2)/LAB
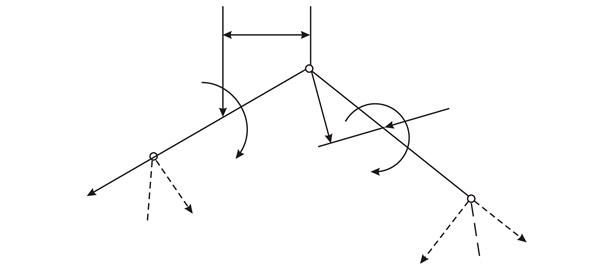
Рис.7.4
Реакцию R43t можно определить аналогично, если рассмотреть равновесие третьего звена:
å МВ (3) = -Р3hp3- M3 - R43t LBC =0
Отсюда имеем R43t =±(-P3hp3-M3)/LBC
После определения величин R12t и R43t с помощью плана сил можно найти R12n и R43n. План сил в масштабе Hp[H/мм] изображен на рис. 7.5. Согласно плану сил имеем:
R12= R12t + R12n; R43 = R43t + R43n
Таким образом RA= R12 = -R21; RC= R43 = -R34
Для нахождения реакции RB cоставим векторное уравнение равновесия для какого-либо звена группы Ассура, например второго:
å Pi (2) = P2 +R12 +R32 =0
План сил показан на рис. 7.6.
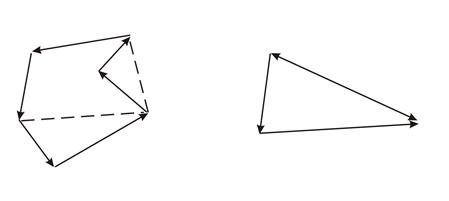
Рис.7.5 Рис.7.6
Выполненные действия позволяют заключить, что реакция RB определена, так как R3 =R32 =-R23
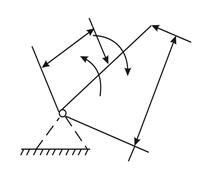
Группа Ассура 2класса, 2 вида (рис. 7.7)
Дано: группа Ассура (звенья 1, 2). P1; P2; M1; M2 (в состав Рi и Мi включены инерционные факторы)
Определить: реакции R01, RA, RB
Решение: так как группа Ассура извлечена из механизма, то воздействие отброшенных звеньев заменяем реакциями R01 и R32 направления, которых неизвестны (показаны пунктиром).
Векторное уравнение равновесия для группы Ассура имеет вид:
å Pi(1,2) = P1+ P2 + R01 + R32n +R32t =0
Тангенциальную составляющую R32t можно определить так:
R32t =(M2-P2hp2)/LAB
Для нахождения реакции R01 и R32n воспользуемся планом сил (рис.7.8)
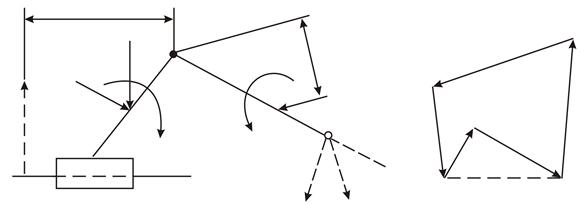
Рис. 7.7 Рис.7.8
Рассмотрев векторные уравнения равновесия, например для первого звена, можно найти с помощью плана сил (рис.7.9) реакцию
RA = R12 = -R21
å рi (1) = R01 +P1 +R21 =0
Чтобы найти плечо L реакции P01, необходимо взять сумму моментов относительно точки А, рассмотрев равновесие первого звена:
å МА (1) =М1 –Р1 hp1 +R01h =0
Отсюда L=(P1hp1-M1)/R01
Знак у величины L укажет на действительное расположение плеча. Если получится «плюс», плечо располагается слева от точки А в противном случае – справа.
Кинетостатический расчет первичных механизмов.
В машинных агрегатах чаще всего входные звенья совершают вращательное движение (кривошипы, кулачки, шестеренки и т.п.)
Для кривошипа, например, на три уравнения статики приходится две неизвестных (величина и направления R01). Несоответствие числа уравнений числу неизвестных вносит неопределенность в решение, чтобы избежать этого, к ведущему звену следует добавить еще один неизвестный силовой фактор в виде уравновешивающих момента Мyp или силы Рур. (В качестве уравновешивающего фактора может быть вращающий момент двигателя или сила реакции со стороны редуктора).
1. Действие на ведущее звено уравновешивающего момента Мур
Дано: Р1, М1, R21
Определить: Мур и R01
1)Для определения Мур достаточно взять сумму моментов относительно точки О:
å М0 (1) =R21 ×hR21 – p1×hp1 –M1 +Myp =0
Мур = М11 +Р1hp1 – R21 ×hR21
2)Реакция R01 находится с помощью плана сил по векторному уравнению:
å Рi (1) = R21+ P1 +R01 (рис.7.10,а)
2. Действие на ведущее звено уравновешивающей силы Рур
Дано: Р1, М1, R21
Определить: Рур, R01
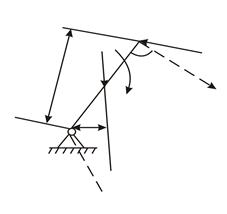
Рис. 7.9 а) б)
Рис. 7.10
Для удобства решения линию действия Рур выбираем перпендикулярно звену ОА, точку приложения в точке А. Тогда записав уравнения моментов относительно т.О., определим Рур:
å М0 = R21 ×hR21 – M1 –P1hp1- Pyp × LOA=0
Pyp = (R21 ×hR21 – M1 –P1hp1)/ LOA
Реакцию можно найти с помощью плана сил: å Рi (1) = R21 +P1+Pyp+ R01 =0 (рис. 7.10,б)
Уравновешивающая сила (момент) и ее расчет методом Н.Е. Жуковского
Силовой расчет механизма с использованием принципа Даламбера проводится в случае, когда требуется определить реакции в к. парах с последующим определением Рур или Мур. Полное кинетостатическое исследование требует значительной по объему и кропотливой работы. При решении общих вопросов динамики машин иногда достаточно знаний только уравновешивающей силы или Му. В этом случаи Ру и Му можно определить способом, предложенным проф. Н.Е. Жуковским, основанным на принципе возможных перемещений:
«Если механизм под действием внешних сил (включая инерционные факторы) находится в равновесии, то построенный для этого механизма план скоростей и принятый как жесткий рычаг, относительно своего полюса, будет также находится в равновесии под действием тех же сил, но повернутых на 900 в любую сторону и приложенных к концам векторов скоростей соответствующих точек механизма»:
åМр=0 Руhy+åМi=0= > Ру =ΣPihi/hy
Определение Ру методом Жуковского проводится в следующем порядке:
Если задана схема механизма и силы, приложенные к звеньям, то необходимо:
1. построить повернутый на 900 план скоростей;
2. на этом плане по правилу подобия найти точки задания сил;
3. в одноименные точки плана перенести параллельно самим себе силы с механизма и уравновешивающую силу;
4. принимая повернутый план скоростей за рычаг с точкой опоры в полюсе Р, записываем уравнение равновесия и определяем величину уравновешивающей силы (или любую неизвестную, входящую в уравнения åМр=0);
5. направление Ру определяется после численного подсчета правой части уравнения (3). Если она окажется положительной, то направление выбрано правильно.
План скоростей, повернутый на 900, с приложенными к нему внешними силами, рассматриваемый как жесткий рычаг, вращающийся вокруг полюса называется рычагом Жуковского.








