2014-02-03
2014-02-03 786
786Рис.25
Рис.24
Рис.23
Элементарная работа, 
Это есть полный дифференциал силовой функции.
Работа на конечном перемещении
 (7)
(7)
где u 2 и u 1 – значения силовой функции в точках М 2 и М 1.
Следовательно, работа силы потенциального поля не зависит от траектории движения точки, а определяется лишь значениями силовой функции в начальном и конечном положениях точки.
Естественно, если точка вернется в начальное положение, работа силы  будет равна нулю. Работа окажется равной нулю и при переходе в другую точку М 3, если там значение силовой функции будет такое же, как и в начальном положении.
будет равна нулю. Работа окажется равной нулю и при переходе в другую точку М 3, если там значение силовой функции будет такое же, как и в начальном положении.
Нетрудно догадаться, что точки с одинаковыми значениями силовой функции будут образовывать целую поверхность. И что силовое поле – это слоеное пространство, состоящее из таких поверхностей (рис. 23). Эти поверхности называются поверхностями уровня или эквипотенциальными поверхностями. Уравнения их: u(x, y, z)=C (C – постоянная, равная значению u в точках этой поверхности). А силовую функцию называют, соответственно, потенциалом поля.
Конечно, эквипотенциальные поверхности не пересекаются. Иначе существовали бы точки поля с неопределенным потенциалом.
Поскольку, при перемещении точки по эквипотенциальной поверхности работа силы равна нулю, то вектор силы перпендикулярен поверхности.
Выберем среди этих поверхностей какую-нибудь одну и назовем ее нулевой поверхностью (положим у нее u=u0).
Работа, которую совершит силапри переходе точки из определенного места М на нулевую поверхность, называют потенциальной энергией точки в этом определенном месте М:
 . (8)
. (8)
Заметим, что потенциальная энергия в одной и той же точке поля зависит от выбора нулевой поверхности.
По (8) силовая функция  . Поэтому проекции силы на декартовы оси, по (6), так как
. Поэтому проекции силы на декартовы оси, по (6), так как  ,
,
 ;
;  ;
;  (9)
(9)
и вектор силы  .
.
Рассмотрим несколько потенциальных полей.
1) Поле силы тяжести.
Вблизи поверхности Земли сила тяжести во всех точках одинакова  , равна весу тела. Значит, это силовое поле однородное. Так как при перемещении точки в горизонтальной плоскости работа силы равна нулю, то эквипотенциальными поверхностями будут горизонтальные плоскости (рис. 24), а уравнения их: u = z = C.
, равна весу тела. Значит, это силовое поле однородное. Так как при перемещении точки в горизонтальной плоскости работа силы равна нулю, то эквипотенциальными поверхностями будут горизонтальные плоскости (рис. 24), а уравнения их: u = z = C.
Если нулевой поверхностью назначить плоскость xOy, то потенциальная энергия точки в положении М будет равна работе силы тяжести:
 .
.
2) Поле упругой силы.
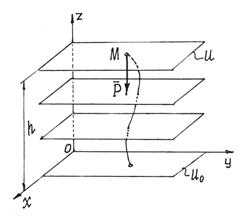
При деформации упругого тела, например пружины, появляется сила. То есть около этого тела возникает силовое поле, силы которого пропорциональны деформации тела и направлены в сторону недеформированного состояния. У пружины – в точку М 0, где находится конец недеформированной пружины (рис. 25).
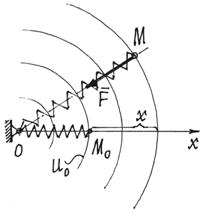
Если перемещать конец пружины так, чтобы длина ее не изменялась, то работа упругой силы будет равна нулю. Значит эквипотенциальными поверхностями являются сферические поверхности с центром в точке О.
Назначим нулевой поверхностью сферу, проходящую через точку М 0, через конец недеформированной пружины. Тогда потенциальная энергия пружины в положении М:  .
.
При таком выборе нулевой поверхности потенциальная энергия всегда будет положительной (П>0), и в растянутом, и в сжатом состоянии.
Рассмотрим точку с массой т, перемещающуюся под действием приложенных к ней сил из положения M 0, где она имеет скорость  , в положение М 1, где ее скорость равна
, в положение М 1, где ее скорость равна  .
.
Для получения искомой зависимости обратимся к уравнению  выражающему основной закон динамики. Проектируя обе части этого равенства на касательную
выражающему основной закон динамики. Проектируя обе части этого равенства на касательную  к траектории точки М, направленную в сторону движения, получим:
к траектории точки М, направленную в сторону движения, получим:

Стоящую слева величину касательного ускорения можно представить в виде
 .
.
В результате будем иметь:
 .
.
Умножив обе части этого равенства на ds, внесем т под знак дифференциала. Тогда, замечая, что  где
где  - элементарная работа силы Fk получим выражение теоремы об изменении кинетической энергии в дифференциальной форме:
- элементарная работа силы Fk получим выражение теоремы об изменении кинетической энергии в дифференциальной форме:
 .
.
Проинтегрировав теперь обе части этого равенства в пределах, соответствующих значениям переменных в точках M 0 и M 1, найдем окончательно:
 .
.
Уравнение выражает теорему об изменении кинетической энергии точки в конечном виде: изменение кинетической энергии точки при некотором ее перемещении равно алгебраической сумме работ всех действующих на точку сил на том же перемещении.
Теорема об изменении момента количества движения точки (теорема моментов).
 Из двух основных динамических характеристик, величина
Из двух основных динамических характеристик, величина  является векторной. Иногда при изучении движения точки вместо изменения самого вектора оказывается необходимым рассматривать изменение его момента. Момент вектора относительно данного центра О или оси z обозначается
является векторной. Иногда при изучении движения точки вместо изменения самого вектора оказывается необходимым рассматривать изменение его момента. Момент вектора относительно данного центра О или оси z обозначается  или
или  и называется соответственно моментом количества движения или кинетическим моментом точки относительно этого центра (оси). Вычисляется момент вектора так же, как и момент силы. При этом вектор считается приложенным к движущейся точке. По модулю
и называется соответственно моментом количества движения или кинетическим моментом точки относительно этого центра (оси). Вычисляется момент вектора так же, как и момент силы. При этом вектор считается приложенным к движущейся точке. По модулю  , где h - длина перпендикуляра, опущенного из центра О на направление вектора (рис.11).
, где h - длина перпендикуляра, опущенного из центра О на направление вектора (рис.11).
Теорема моментов относительно центра. Найдем для материальной точки, движущейся под действием силы F (рис.26), зависимость между моментами векторов и  относительно какой-нибудь неподвижного центра О. В конце было показано, что
относительно какой-нибудь неподвижного центра О. В конце было показано, что  .
.
Аналогично  .
.
 При этом вектор
При этом вектор  направлен перпендикулярно плоскости, проходящей через центр О и вектор , а вектор - перпендикулярно плоскости, проходящей через центр О и вектор .
направлен перпендикулярно плоскости, проходящей через центр О и вектор , а вектор - перпендикулярно плоскости, проходящей через центр О и вектор .