2021-07-31
2021-07-31 508
508
В отличие от других проектов, создание мобильного робота требует понимания и навыков работы сразу с несколькими важными компонентами, поэтому не стоит приступать к созданию без базовых навыков работы с платформой Arduino. Вам нужно будет но только подключить готовые модули, но и собрать конструкцию, шасси с двигателями, обеспечить правильное питание и управление.
Существует множество платформ для мобильных роботов ардуино. Примеры показаны ниже:

| 
| 
|
Рисунок 1. Примеры мобильных роботов
Мы соберем платформу на базе гусеничной тележки. В наборе с платформой идет комплект креплений и подробная инструкция сборки подвижной платформы, следуя ей установите моторы на платформе (рис.2).
 |
Рисунок 2. Примеры мобильных роботов
Чтобы управлять моторами необходимо установить поверх платы ардуино специальную плату «Motor Shield» (рис. 3).
 |
Рисунок 3. Motor shield
Мотор шилд это специальная плата расширения, предназначенная для управления моторами их скоростью и направлением вращения. Мотор шилд устанавливается на плату Ардуино. Провода от правого мотора подключаются в слот М1, а от левого мотора в слот M2. Подсоединяем отсек с источником питания к клеммам питания мотор шилда,необходимо правильно соблюдать полярность: плюс отсека питания к клемме + мотор шида. Минус отсека питания к клемме – мотор шилда (рис.3).
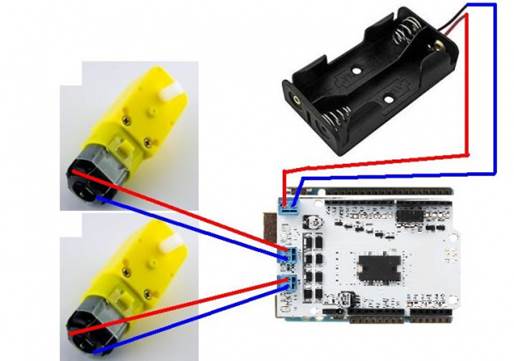 Рисунок 3. Электрическое соединение компонентов
Рисунок 3. Электрическое соединение компонентов
Для начала напишем в среде программирования mBlock простую программу для робота движения вперед.
В самом начале программы мы должны определить пины через которые мы будем управлять скоростью и направлением вращения моторов. Для моторного шилда показанного на рис.3 используются номера пинов заложенные производителем платы.
 Последние две команды останавливают робот.
Последние две команды останавливают робот.
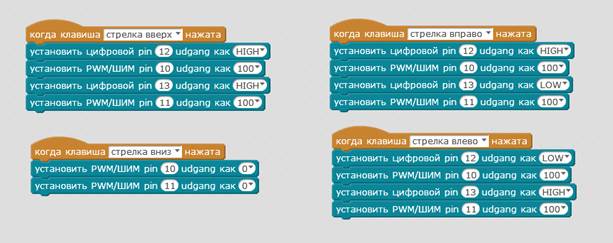
Для управление роботом с клавиатуры компьютера посредством провода потребуется переключить mBlock в интерактивный режим программирования. Программа для управления роботом представлена ниже:
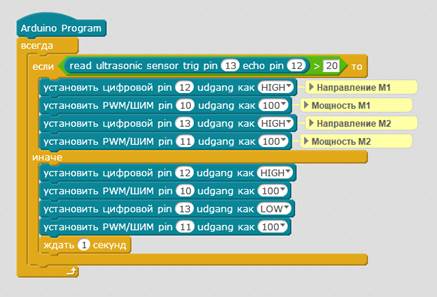
Для автономного управления роботом потребуется добавить на робот датчики расстояния либо датчики для движения по линии.
Пример программы для автономного движения робота с объездом препятствий по датчику расстояния: