 2021-10-23
2021-10-23 319
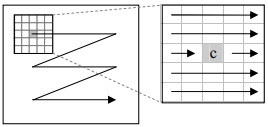
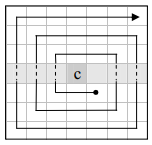
319Прямой подход к поиску экстремумов в двухмерном массиве представлен на рис. 1, а. Пиксели исходного изображения анализируются в порядке растрового сканирования (слева направо, затем сверху вниз). Каждый анализируемый пиксель сравнивается с другими пикселями в своей окрестности размером  пикселей также в порядке растрового сканирования [9]. Центральный пиксель С не является максимальным, если найден любой более значимый или равный соседний пиксель. Затем алгоритм переходит к следующему пикселю в строке сканирования. Прямой подход требует
пикселей также в порядке растрового сканирования [9]. Центральный пиксель С не является максимальным, если найден любой более значимый или равный соседний пиксель. Затем алгоритм переходит к следующему пикселю в строке сканирования. Прямой подход требует  сравнений на пиксель для
сравнений на пиксель для  -окрестности. Наилучшему варианту сооветствует ситуация, когда вектор интенсивности меняется на противоположный. При этом прямой подход требует только одного сравнения на пиксель. В среднем, однако, данный подход требует
-окрестности. Наилучшему варианту сооветствует ситуация, когда вектор интенсивности меняется на противоположный. При этом прямой подход требует только одного сравнения на пиксель. В среднем, однако, данный подход требует  сравнений на пиксель.
сравнений на пиксель.
| 
| 
|
| а | б | в |
Рис. 1. Представление способов сканирования изображений: а – растровое сканирование;
б – спиральное сканирование; в – Block partitioning
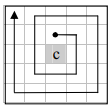
Cложность алгоритма растрового сканирования может быть значительно уменьшена путем анализа соседних пикселей в другом порядке. В работе [10] представлен такой алгоритм с локальным спиральным порядком (рис. 1, б). Сначала, в результате сравнения, центральный пиксель, возможно, будет локальным максимумом в  -окрестности. Затем он проверяется
-окрестности. Затем он проверяется
в большей окрестности. Так как количество локальных максимумов в -окрестности
в изображении обычно невелико ( % от общего количества пикселей), алгоритм спирального порядка быстро находит любые немаксимальные значения, пропускает
% от общего количества пикселей), алгоритм спирального порядка быстро находит любые немаксимальные значения, пропускает
их и переходит на следующий пиксель. Число локальных максимумов в окрестности с размером пикселей также быстро уменьшается, поскольку размер окрестности увеличивается. В результате вычислительная сложность этого алгоритма примерно постоянна (не более  сравнений на пиксель для обнаружения в -окрестности немаксимальных пикселов) независимо от размера окрестности.
сравнений на пиксель для обнаружения в -окрестности немаксимальных пикселов) независимо от размера окрестности.
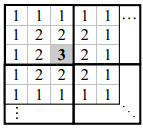
В работе [9] представлен эффективный алгоритм NMS, который требует 2,39 сравнений на пиксель в среднем и 4 сравнения на пиксель в худшем случае. Они отметили, что максимальный пиксель в окрестности размером пикселя также является максимальным для любого окна размером  пикселей. Входное изображение разбивается на неперекрывающиеся блоки размера пикселей и локальный максимум каждого блока детектируется (рис. 1, в иллюстрирует это для
пикселей. Входное изображение разбивается на неперекрывающиеся блоки размера пикселей и локальный максимум каждого блока детектируется (рис. 1, в иллюстрирует это для  ). Затем
). Затем
для максимального размера блока пикселей за исключением охватывающего блока  пикселей. Используя только одно сравнение на пиксель, шаг разбиения блока уменьшает количество локальных максимумов с фактором . В результате метод достаточно эффективен для больших размеров окрестностей. Решение уменьшить количество дополнительных сравнений на одного кандидата до
пикселей. Используя только одно сравнение на пиксель, шаг разбиения блока уменьшает количество локальных максимумов с фактором . В результате метод достаточно эффективен для больших размеров окрестностей. Решение уменьшить количество дополнительных сравнений на одного кандидата до  ,
,
значительно увеличивает сложность алгоритма и использование памяти.
Метод NMS для окрестности пикселей часто решается с помощью математической морфологии [11, 12], в результате чего входное изображение сравнивается с его дилатацией серого цвета. Пиксели, где два изображения равны, соответствуют локальным максимумам. Однако математическая морфология не возвращает строгие локальные максимумы,
где центральный пиксель строго больше, чем все соседние пиксели. С точки зрения вычислительной сложности морфология также неэффективна – реализация дилатации для
-окрестности полутонового изображения требует шести сравнений на пиксель [6, 7].
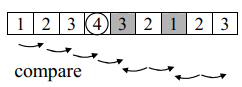
В [13] предложен алгоритм сканирующей линии для NMS, который требует не более 2 сравнений на пиксель. Алгоритм сначала ищет одномерные локальные максимумы вдоль линии сканирования. Затем каждый максимальный уровень сканирования сравнивается с соседними пикселями в соседних строках. Две двоичные маски сохраняются для текущей и следующей строк сканирования в буфере. По мере обработки нового центрального пикселя соседние ему пиксели маскируются, если они меньше центрального пикселя. Маскированные пиксели будут пропущены, когда наступит их очередь обработки (рис. 2). В результате этот алгоритм NMS
для окрестности пикселей требует не более двух сравнений на пиксель.
| 
| 
|
| а | б | в |
Рис. 2. Маски сканирующей линии – окрестности: а – 1-D Non-maximum Suppression [13];
б – растровое сканирование; в – Scan-line [13]
Алгоритм сканирующей линии для -окрестности может быть расширен до блоков пикселей при  [13]. Предположим, что максимумы
[13]. Предположим, что максимумы  -окрестности на текущей линии сканирования расположены так, как показано на рис. 3, б (пиксели
-окрестности на текущей линии сканирования расположены так, как показано на рис. 3, б (пиксели
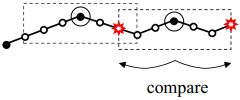
в окружностях). Эти 1-D максимумы служат кандидатами на двумерные максимумы. Каждый кандидат проверяется на экстремум в -окрестности в спиральном порядке, аналогичном методу Forstner [10]. При этом соседние пиксели, расположенные на одной линии сканирования, уже были сопоставлены и потому могут быть пропущены (серые пиксели
на рис. 3, в). Это приводит к тому, что максимум для  -соседей сравнивается с каждым кандидатом. В результате среднее количество сравнений на один кандидат намного меньше благодаря порядку перемещения по спирали.
-соседей сравнивается с каждым кандидатом. В результате среднее количество сравнений на один кандидат намного меньше благодаря порядку перемещения по спирали.

|
| 
|
| а | б | в |
Рис. 3. Сканирующий алгоритм NMS для  -окрестности (
-окрестности ( ):
):
а – 1-D обнаружение пиков; б – 1-D исключение не-максимумов; в – спиральное сканирование
Обнаружение максимумов в  – окрестности на одномерной сканирующей линии функции
– окрестности на одномерной сканирующей линии функции  подробно показано на рис.3 а. Если
подробно показано на рис.3 а. Если  – знак конечной разности функции
– знак конечной разности функции  , значение
, значение  равно либо –1, 0 или 1 в зависимости от локального наклона
равно либо –1, 0 или 1 в зависимости от локального наклона  . Cледовательно, rонечная разность
. Cледовательно, rонечная разность  , равна –2 на локальных пиках, +2 в локальных желобах и 0 в другом месте. Таким образом, для обнаружения 1-D пика и минимума требуется только одно сравнение
, равна –2 на локальных пиках, +2 в локальных желобах и 0 в другом месте. Таким образом, для обнаружения 1-D пика и минимума требуется только одно сравнение
на пиксель. Затем каждый 1-D экстремум сравнивается с его участком в  – окрестности со знанием экстремума детектора
– окрестности со знанием экстремума детектора  . Соседние пиксели, которые находятся на последовательном склоне вниз от локального пика, т. е.
. Соседние пиксели, которые находятся на последовательном склоне вниз от локального пика, т. е.  , по определению меньше, чем текущий пик, поэтому их не нужно повторно сравнивать. Пиксели, расположенные вне закрывающих впадин текущего пика, требуются дополнительного сравнения. Число дополнительных сравнений для получения максимумов
, по определению меньше, чем текущий пик, поэтому их не нужно повторно сравнивать. Пиксели, расположенные вне закрывающих впадин текущего пика, требуются дополнительного сравнения. Число дополнительных сравнений для получения максимумов  -окрестности из исходного списка максимумов
-окрестности из исходного списка максимумов  -окрестности очень мало для гладкой функции
-окрестности очень мало для гладкой функции  .
.
Недостатками рассмотренных выше алгоритмов являются низкая скорость поиска, наличие ошибок обнаружения экстремумов на границах блоков изображения, пропуск локальных минимумов. В этой связи актуальной является задача поиска всех локальные однопиксельных экстремумов (как максимумов, так и минимумов) на изображении с низкой вычислительной сложностью без использования дополнительной памяти. Предлагаемый алгоритм позволяет быстро найти все локальные однопиксельные экстремумы.








