 2014-02-17
2014-02-17 568
568Установившийся полет всякого летательного аппарата возможен при условии полной его балансировки, т. е. при равенстве нулю суммы всех сил и суммы всех моментов, действующих на летательный аппарат. В отличие от самолета балансировка вертолета имеет принципиальные особенности, определяемые в основном условиями работы и свойствами несущего винта, а также аэродинамической асимметрией вертолета одновинтовой схемы.
Характерные особенности балансировки:
1. У самолета угол тангажа в значительной степени зависит от угла наклона траектории полета. У вертолета же угол тангажа изменяется при изменении угла наклона траектории столь незначительно, что при одной и той же скорости полета в наборе высоты, в горизонтальном полете и на планировании практически остается неизменным.
2. В отличие от самолета у вертолета с изменением скорости горизонтального полета положение ручки управления в поперечном отношении существенно изменяется. Вместе с этим от скорости прямолинейного полета зависит также и балансировочное положение педалей ножного управления.
Уяснить особенности балансировки вертолета можно, рассмотрев схему сил и моментов, действующих на вертолет в полете с поступательной скоростью (рис. 39).
Силы и моменты, действующие в установившемся
горизонтальном полете в плоскости симметрии
вертолета (продольная балансировка)
Силы:
G — сила тяжести;
Т — силатяги или составляющая полной аэродинамической силы несущего винта, направленная по оси втулки винта;
Н — составляющая силы R, действующая в плоскости вращения втулки несущего винта (продольная сила);
Хвр — сила вредного лобового сопротивления (сила сопротивления фюзеляжа и других ненесущих частей конструкции, шасси, стабилизатора);
Нр.в, Sр.в — продольная и боковая силы рулевого винта (эти силы практически очень малы и при анализе равновесия их обычно не учитывают);
Yст — подъемная сила стабилизатора.
Моменты:
Мреакт — реактивный момент рулевого винта;
Мпрод — продольный момент несущего винта, имеющего разнос горизонтальных шарниров лопастей.
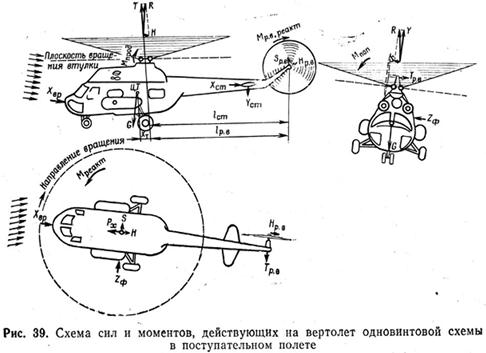
Силы и моменты, действующие в поперечной плоскости
(поперечная балансировка)
Силы:
G — сила тяжести;
Y — вертикальная составляющая силы R (проекция силы на вертикальную плоскость);
S — боковая сила несущего винта (составляющая силы R, возникающая вследствие наклона конуса вращения лопастей вбок);
Тр.в — тяга рулевого винта;
Zф — боковая составляющая силы сопротивления фюзеляжа (например, при полете вертолета со скольжением).
Момент Мпоп — поперечный момент несущего винта, возникающий вследствие разноса горизонтальных шарниров.
Силы и моменты, действующие в горизонтальной
плоскости (путевая балансировка)
Rx — горизонтальная составляющая силы тяги;
Хвр — сила вредного сопротивления;
S — боковая составляющая силы тяги несущего винта;
Тр.в — тяга рулевого винта;
Zф — боковая составляющая силы сопротивления фюзеляжа;
Нр.в — продольная сила рулевого винта.
Моменты:
Мреакт - реактивный момент несущего винта;
Мр.в = Тр.вlр.в — момент тяги рулевого винта.
Показанные на рис. 39 силы, кроме силы тяжести G, дают относительно центра тяжести вертолета моменты, которые также надо учитывать при рассмотрении его балансировки.








