 2014-02-09
2014-02-09 672
672Подвижно соединенные между собой части механизма называются звеньями. В механизме различают неподвижное звено-стойку (станина станка, корпус прибора, шасси и т. п.) и подвижные звенья, которые могут совершать вращательное, поступательное и сложное движение. Звеном может быть одна или несколько жестко связанных между собой деталей.
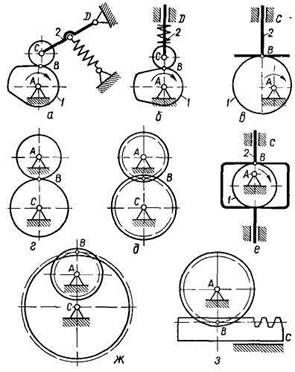
 В зависимости от характера движения и назначения звенья имеют определенные названия. Например, в механизме шарнирного четырехзвенника (рис. 1.1, а) и его модификациях, являющихся основой многих машин и приборов, звено 1, совершающее полный оборот, называется кривошипом; звено 2, совершающее сложное плоскопараллельное движение,— шатуном; звено 3, совершающее качательное движение,— коромыслом; неподвижное звено 4 является стойкой. На рис. 1.1 штриховыми линиями изображены крайние положения механизма.
В зависимости от характера движения и назначения звенья имеют определенные названия. Например, в механизме шарнирного четырехзвенника (рис. 1.1, а) и его модификациях, являющихся основой многих машин и приборов, звено 1, совершающее полный оборот, называется кривошипом; звено 2, совершающее сложное плоскопараллельное движение,— шатуном; звено 3, совершающее качательное движение,— коромыслом; неподвижное звено 4 является стойкой. На рис. 1.1 штриховыми линиями изображены крайние положения механизма.
Модификации шарнирного четырехзвенника образуются в зависимости от относительного расположения вращательно и поступательно движущихся звеньев и их размеров. Если крайнюю вращательную кинематическую пару D заменить на поступательную, то звено 3 (рис. 1.1, а) превращается в ползун, и такой механизм называется кривошипно-ползунным (рис. 1.1, б).
Рис. 1.1 Механизм четырёхзвенника и его модификации
Если в этом механизме стойкой сделать звено 1, то образуется кривошипно-кулисный механизм (рис. 1.1, в), звено 4 становится подвижной направляющей для ползуна 3 и называется кулисой. Кулисные механизмы, в состав которых входят два ползуна, образуют тангенсные (рис. 1.1, г) и синусные (рис. 1.1, д) механизмы.
Широкое применение в технике нашли также кулачковые механизмы, отличающиеся большим разнообразием форм кулачков (рис. 1.2, а, б, в, е), фрикционные (рис. 1.2, г) и зубчатые механизмы (рис. 1.2, д, ж, з), типы которых определяются количеством, формой и взаимным расположением звеньев.
 1.1. Кинематические пары и цепи
1.1. Кинематические пары и цепи
Кинематическая пара. Соединение двух звеньев, обеспечивающее определенное относительное движение, образует кинематическую пару. Элементами кинематической пары называются поверхности, линии или точки, по которым происходит подвижное соединение двух звеньев и которые ограничивают относительное движение этих звеньев. В зависимости от вида элементов различают высшие и низшие кинематические пары. В высших кинематических парах элементами являются линии или точки (пара В, рис. 1.2).
Рис.1.2 Механизмы с высшими парами и способ их замыкания
Кинематические пары, образованные элементами в виде поверхностей, называются низшими (пара А, рис. 1.2). Замыкание кинематических пар может быть геометрическим (рис. 1.2, ё) и силовым (рис. 1.2, а, б), например, с помощью пружин. Условное обозначение кинематических пар установлено ГОСТ 2.770—68.
Класс пары. Свободное звено в пространстве обладает шестью степенями свободы. Звено, входящее в кинематическую пару, теряет от одной до пяти степеней свободы. Класс кинематической пары определяется числом условий связи S, налагаемых на относительное движение звеньев. Различают пять классов кинематических пар (рис. 1.3). Если Н — число степеней свободы звеньев кинематической пары, то
S = 6 — H. (1.1)
Например, в парах на рис. 1.3, г конструкции элементов позволяют осуществлять два независимых движения. Для них Н = 2 и S = 4; следовательно, эта пара—четвертого класса. Если же на звене цилиндрической пары установить бурты, препятствующие поступательному движению (рис. 1.3, д), то остается единственное возможное вращательное движение, следовательно, Н = 1 и 5 = 5 — пара пятого класса.
Можно подобрать такую форму элементов пары, чтобы при одном независимом движении возникло второе — производное: в винтовой паре (рис. 1.3, ж) вращательное движение винта вызывает поступательное перемещение его вдоль оси. Такую пару следует отнести к пятому классу, так как имеется всего одно независимое движение (Я = 1).
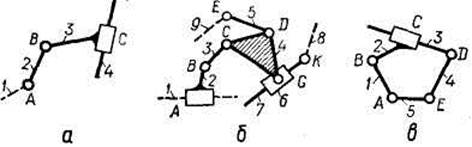 Кинематическая цепь. Звенья, соединенные между собой кинематическими парами, образуют кинематическую цепь. Кинематические цепи могут быть простыми (рис. 1.4, а), сложными, если хотя бы одно звено входит больше чем в две кинематические пары (рис. 1.4, б), замкнутыми (рис. 1.4, в) и незамкнутыми, если есть звенья, входящие в одну кинематическую пару (рис. 1.4, а).
Кинематическая цепь. Звенья, соединенные между собой кинематическими парами, образуют кинематическую цепь. Кинематические цепи могут быть простыми (рис. 1.4, а), сложными, если хотя бы одно звено входит больше чем в две кинематические пары (рис. 1.4, б), замкнутыми (рис. 1.4, в) и незамкнутыми, если есть звенья, входящие в одну кинематическую пару (рис. 1.4, а).
Рис.1.4. Кинематические цепи
Различают пространственные и плоские кинематические цепи. Все звенья плоской кинематической цепи размещаются в параллельных плоскостях и совершают плоскопараллельные движения. Поскольку на звенья плоских цепей налагаются три дополнительных общих условия связи, исключающих движение в других плоскостях, то в плоской цепи могут быть пары только четвертого или пятого класса. Пара четвертого класса в плоской цепи налагает на относительное движение звеньев одно условие, а пара пятого класса — два условия связи. Пары четвертого класса в плоских цепях высшие (см. рис. 1,6 пары F и L), пары пятого класса чаще всего низшие: вращательные (рис. 1.3, д) или поступательные (рис. 1.3, е).








