 2014-02-18
2014-02-18 12545
12545Контроллеры машиниста служат для дистанционного (косвенного) управления работой тяговых двигателей в тяговом и тормозном режимах; с их помощью подключают к источнику низкого напряжения и отключают в определенной последовательности провода цепи управления, т. е. включают и выключают в определенной последовательности высоковольтные аппараты при пуске, регулировании скорости движения, остановке, изменении направления движения и электрическом торможении электровоза или электропоезда. Контроллер машиниста имеет ряд рукояток, каждая из которых предназначена для определенных операций управления и имеет несколько фиксированных позиций, соответствующих определенным включениям аппаратов силовой цепи.
При конструировании контроллеров должны быть соблюдены требования, обеспечивающие простоту и легкость пользования ими и наиболее простую кинематику блокировочных механизмов; наименьшие массу и габаритные размеры аппарата; надежность работы его переключающих устройств, удобство осмотра и ремонта всех его деталей. Распределение функций управления и расположение отдельных рукояток контроллера выполняют так, чтобы обеспечить простоту и удобство пользования ими и не допускать отвлечения машиниста от наблюдения за сигналами, путем и контактной сетью. Механические блокировки в контроллере создают взаимозависимость между рукоятками, что предотвращает ошибочные действия машиниста.
Одну из рукояток, чаще всего реверсивную или реверсивно-селективную, на каждом контроллере машиниста делают съемной. Съемная рукоятка может быть снята с аппарата только в нулевом поло жении, в которое ее можно поставить после возвращения других рукояток также в нулевое положение. Контроллер машиниста устанавливают в каждой кабине управления, а реверсивную или реверсивно-селективную рукоятку выдают одну на все контроллеры состава. Поэтому машинист не может случайно оставить какую-либо рукоятку на одном из контроллеров во включенном положении, так как это вызвало бы нарушение правильной работы электрических цепей при управлении составом с другого контроллера.
По конструкции различают контроллеры машиниста барабанные, кулачковые и бесконтактные.
В барабанных контроллерах замыкание и размыкание цепей проводов управления осуществляют сегментами 2 при повороте барабана 1 на определенный угол. К сегменту 2 прижимаются пальцы 3, которые соединены с соответствующими проводами цепи управления. Пальцы укреплены на стойке 4
В кулачковых контроллерах замыкание и размыкание цепей проводов управления осуществляют кулачковые контакторы (контакторные элементы), укрепленные на стойке 4, на которые воздействуют кулачковые шайбы 11.
При вращении рукояткой вала 12 контроллера кулачковая шайба 11 своим выступом 9 нажимает на ролик 8 и размыкает цепь контактами 5 и 6, к которым присоединены провода цепи управления. Как только выступ шайбы пройдет ролик, пружина 7 повернет рычаг 10 и снова замкнет контакты 5 и 6.
В барабанных контроллерах при скольжении пальцев по поверхности сегментов сильно изнашиваются их контактные поверхности. Износ увеличивается с увеличением длины пути скольжения пальцев, а также при образовании дуги на контактах. В этом отношении контроллеры барабанные уступают кулачковым, которые применяют на всем отечественном э. п, с. В качестве примера рассмотрим кулачковые контроллеры машиниста 1 КМ-84 и КМЭ-8.
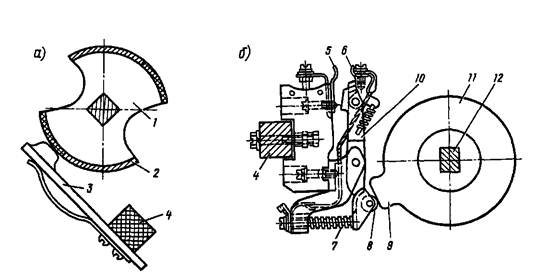 |
Рис. Схемы кулачковых контакторов контроллеров машиниста
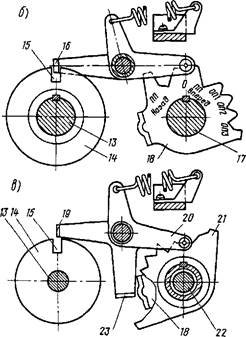
Все узлы контроллера машиниста КМ-84 электровоза ВЛ80С смонтированы между двумя рамами 1 и 4, соединенными рейками 11 и 12. Группы кулачковых контакторов 2 и 9 приводятся в действие валами, которые соединены со своими рукоятками — главной 10, тормозной 7 и реверсивной 8. Рукоятка 8 съемная. Каждый вал состоит из стальной оси и насаженных на нее кулачковых изоляционных прессованных шайб 6. Все валы сблокированы между собой механически (рис. 219, б, в и г) с помощью дисков 14, 18, 21, рычагов 20, валов 5, 13, 17, 22, пружин и защелок 16, 19, 23 с пазами 15. Эти блокировки обеспечивают следующее:
возможность перемещения главной рукоятки 10) в любое положение при установке реверсивной 8 в положения ПП (Вперед или Назад), ОП1, ОП2, ОПЗ и тормозной рукоятки 7 в положение 0;
возможность перемещения тормозной рукоятки 7 в любое положение при установке реверсивной 8 в положение ПП (Вперед или Назад) и главной 10 в положение 0\
возможность перемещения реверсивной рукоятки 8 в положения ОП1, ОП2, ОПЗ при установке тормозной рукоятки 7 только в положение 0, а в положении 0 при установке главной 10 и тормозной 7 рукояток в положение 0\ невозможность перемещения главной
 |
 | |||
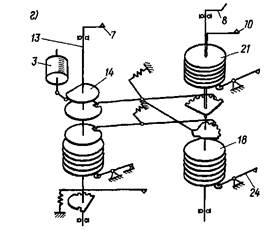 |
Рис. Общий вид (а), механические бло кировки реверсивного и тормозного валов (б), главного, реверсивного и тормозного валов (в) и кинематическая схема контроллера машиниста КМ-84 электровоза ВЛ80С (г).
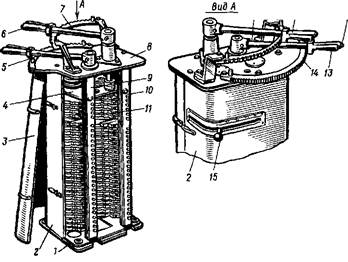
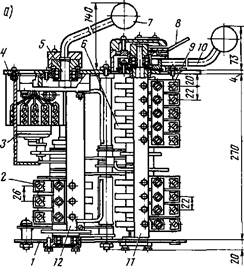
Рис. Общий вид контроллера машиниста КМЭ-& 1—основание (литое), 2 н 3 — соответственно передний и задний кожуха из листовой стали; 4 — средняя рама,
5— рукоятка главного вала,5— рукоятка тормозного вала; 7 — сектор зубчатый рукоятки тормозного вала, 8 — крышка (литая); 9 и 10 — стальные планкн, 11 — кулачковые контакторы, 12 — кнопка в торце рукоятки для выдержки времени при переходе с одного соединения тяговых двигателей на другое, 13 — фиксатор, 14 — сектор зубчатый рукоятки главного вала,15 — съемная рукоятка реверсивно-селек-
тивного вала.
10 и тормозной 7 рукояток при нахождении реверсивной 8 в положении 0.
Главный вал 22 расположен соосно с реверсивным 17, имеет положения: 0 — нулевое, АВ — автоматическое выключение, РВ — ручное выключение, ФВ — фиксация выключения, ФП — фиксация пуска, РП — ручной пуск, АП — автоматический пуск, БВ — быстрое выключение.
Положения 0, АВ, РВ, ФВ, ФП, РП — фиксированные, положения АП и БВ с самовозвратом.
Реверсивный вал 17 имеет положения 0 — нулевое; ПП (Вперед) — полное возбуждение; ОП1, ОП2, ОПЗ — соответственно первая, вторая, третья ступени ослабления возбуждения; ПП (Наад) — полное возбуждение. Все позиции реверсивного переключателя фиксированные.
Тормозной вал 13 устанавливается в следующие фиксированные положения: 0 — нулевое, Я — подготовка цепи к торможению, ПТ — предварительное торможение с тормозной силой до 12-104Н (12 тс), Торможение. Положения 0, П, ПТ и крайние положения зоны Торможение фиксированные, положения зоны Торможение нефиксированные На валу 13 установлена профильная шайба, с помощью которой производится поворот ротора сельсина-датчика торможения 3; от угла поворота а тормозного вала зависит напряжение /7ВЫХ (например, при а = 270° напряжение /7аых = 0, при а = 60° — UBUX = 24,5 В)
Контроллеры машинистов электровозов ВЛ80Т по конструкции аналогичны контроллеру КМ-84. Конструкция контроллера электровозов ВЛ8, ВЛ10, ВЛ10У .
Назначение и технические данные. Контроллер машиниста служит для дистанционного управления работой тяговых электродвигателей. Технические данные контроллера следующие:
Раствор контактов, мм 4 — 7
Провал контактов, мм .<. 2,5 — 4
Нажатие контактов, Н 25 — 30
Номинальное напряжение, В.. 50
Ток номинальный, А 30
Предельный отключаемый ток при напряжении 50 В и индуктивности цепи L = 15 мГн.
Конструкция. Контроллер машиниста (рис. 113) имеет два кулачковых вала: главный 6 и тормозной 7. Валы приводятся в движение рукоятками главной 2 и тормозной /, которые связаны с соответствующими зубчатыми передачами. Реверсирование тяговых электродвигателей и выбор схемы из соединения в тормозном режиме осуществляются двумя кулачковыми барабанами, которые посажены на подшипниках на главном и тормозном валах; оба барабана управляются одной реверсивно-се- лективной рукояткой 8.
Кулачковые шайбы главного и тормозного валов переключают кон- такторные элементы 4, смонтированные на двух рейках 5. Главный вал имеет 48 позиций (не считая нулевой), из которых 18-я, 33-я и 48-я являются ходовыми, а остальные — пусковыми. Тормозной вал имеет четыре позиции ослабления возбуждения и 28 позиций торможения. Фиксация главного и тормозного валов по позициям обеспечивается защелками рукояток, западающими в пазы секторов, расположенных на крышке контроллера 3.
Реверсивно-селективная рукоятка имеет шесть положений:
О — нулевое (соответствует отключенному состоянию цепей тяговых электродвигателей);
М — для пуска и разгона электровоза на последовательном, последовательно-параллельном и параллельном соединениях тяговых электродвигателей при движении Вперед и Назад в тяговом режиме;
П, СП и С — для рекуперативного торможения при движении электровоза Вперед на параллельном,последовательно-параллельном и последовательном соединениях тяговых электродвигателей.
Последовательность замыкания контактов определяется профилем кулачковых шайб.
Для предотвращения ошибочных действий при работе предусмотрена механическая блокировка, которая исключает следующие перемещения рукояток:
главной — при установке ревер- сивно-селективной рукоятки на позиции О, П, СП, С;
тормозной — при установке ре- версивно-селективной рукоятки на позицию 0;
реверсивно-селективной — при установке главной или тормозной рукояток не на позицию 0\
тормозной в сторону позиций ОВ; при установке реверсивно-селектив- ной рукоятки на позициях П, СП, С;
при установке реверсивно-селек- тивной рукоятки в положение М и главной рукоятки не на позиции 18, 33,48;
тормозной в сторону позиций П, ПТ при установке реверсивно-селек- тивной рукоятки на позиции М.
На контроллере машиниста установлен задатчик скорости 9, который связан с тормозным валом зубчатой передачей и служит задатчиком тока рекуперации или скорости движения электровоза.
Реверсивная рукоятка может быть установлена на нулевую пози-
цию и вынута из гнезда контроллера лишь после постановки главной и тормозной рукояток на нулевые позиции. При постановке реверсивной рукоятки на нулевую позицию главная и тормозная рукоятки заблокированы на нулевых позициях.

