 2014-02-18
2014-02-18 4126
4126Принцип компенсации используется при наличии на объекте управления контролируемых входных переменных v(t). В этом случае для повышения точности функционирования САУ вводятся коррективы в алгоритм управления по результатам измерения с целью компенсации нежелательных отклонений управляемой переменной y(t), вызванных отклонениями v(t). Поэтому этот принцип и называется принципом компенсации.
Схема САУ, реализующей принцип компенсации приведена на рис. 1.4.
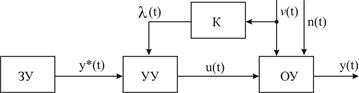
Рис. 1.4. Схема САУ, реализующей принцип компенсации
где ЗУ – задающее устройство, формирующее задающие воздействия y*(t), определяющие характер изменения целевой переменной y(t); К – компенсатор, алгоритм функционирования которого
 (1.1)
(1.1)
разрабатывается таким образом, чтобы в установившемся режиме отклонение y(t), обусловленное изменением v(t) отсутствовало. Для этого в устройстве управления алгоритм управления формирует управляющее воздействие u(t) c учетом как задающего воздействия y*(t), так и сигнала с компенсатора l(t), т.е.
 (1.2)
(1.2)
или при объединении устройства управления и компенсатора в одном устройстве
 . (1.3)
. (1.3)
Достоинство – высокое быстродействие за счет учета нежелательных изменений входных воздействий при выработке управляющих воздействий.
Недостаток – низкая точность из-за трудности (невозможности или нецелесообразности) измерения всех входных воздействий.

