 2014-02-24
2014-02-24 1177
1177Вопросы для самопроверки
1. Каковы основные разновидности элементарных средств измерений, как математически описываются алгоритмы их функционирования?
2. Какие виды и методы измерений вы знаете, в чем их суть?
3. Как осуществляется аналитическое описание процедуры измерений?
4. В чем суть и особенности измерений первым методом сопоставления в различных его разновидностях? Каковы их структура, алгоритмы и аналитическое описание?
5. В чём суть и особенности измерений первым (нулевым) методом уравновешивания в различных его разновидностях? Каковы их структуры, алгоритмы и аналитическое описание?
6. В чём суть и особенности измерений методом замещения в двух его вариантах? Какова их структура, алгоритмы и аналитическое описание?
7. Как можно представить обобщенные алгоритмы и структуры измерений вероятностных характеристик случайных процессов? Приведите пример их применения при измерениях одной из статистических характеристик.
Здесь блоки представляют подсистемы, а их взаимное расположение отражает иерархическую структуру всей системы. Он имеет (n+2) основных подсистем: вышестоящую управляющую систему C0, n нижестоящих управляющих систем Ci и управляемый процесс Р. Отметим два вида вертикального взаимодействия между подсистемами. Один - это передача вниз "командных" сигналов; сигналы от нижестоящих управляющих систем к процессу называются управляющими воздействиями, тогда как сигналы от вышестоящей к нижестоящим управляющим системам называются координирующими сигналами. Другой вид вертикального взаимодействия - это передача наверх информационных сигналов, или сигналов обратной связи, различным управляющим системам иерархии. Эти передачи сигналов представлены на блок-схеме пунктирными линиями.
Простейший способ описания подсистем двухуровневой структуры связан с использованием терминальных переменных: входов и выходов. При этом удобно описывать подсистемы как функциональные в том смысле, что входы однозначно определяют выходы; можно рассматривать эту ситуацию как ситуацию, в которой задано текущее состояние. Поэтому каждый из блоков представляет собой отображение. Когда мы будем описывать подсистемы, введем соответствующие названия для различных o6ъектов, чтобы подчеркнуть концептуальную роль каждого из них в функционировании двухуровневой системы.
Рассмотрим сначала процесс Р, как некую управляемую систему, к которой поступают управляющие воздействия от системы управления нижнего уровня C1,..., Сn. К нему приходят входные сигналы двух видов: управляющие сигналы (управляющие входы) m, m <> M, где М называется множеством управляющих сигналов, и сигналы (входы) ω, ω<> Ω, представляющие собой внешние возмущения, поступающие из окружающей среды. Символом y, y <>Y мы будем обозначать "выход" процесса Р и соответственно будем называть множество Y множеством выходов процесса Р.
Будем представлять процесс Р в виде отображения
Р: М * Х * Q → Y.
Поскольку имеется n нижестоящих (локальных) управляющих систем C1,..., Сn, удобно представить множество управляющих сигналов M для процесса P в виде декартова произведения n множеств
M = M1*...*Mn
причем i -я локальная управляющая система Сi, имеет полномочия выбирать i -ю компоненту mi управляющего сигнала m, оказывая тем самым соответствующее воздействие на процесс.
Рассмотрим далее i -ю локальную систему управления Ci. Здесь мы будем считать ее просто системой вход - выход. К системе Ci также поступают входные сигналы двух видов: координирующий сигнал γ, γ Γ, поступающий от вышестоящей управляющей системы, и информационный сигнал zi (сигнал обратной связи), поступающий от процесса. Выходом Сi является (локальное) управление mi, выбираемое из множества Mi. Будем считать, что с помощью рассматриваемой системы реализуется отображение
Сi: Γ * Zi → Mi
где Zi - множество информационных сигналов (сигналов обратной связи) Zi. Мы будем обращаться в дальнейшем к множеству Γ, называя его множеством координирующих сигналов, а его элементы γ - соответственно координирующими сигналами, так как с помощью этих сигналов управляющая система С0 воздействует на нижестоящие, локальные управляющие системы Сi. Поскольку каждая нижестоящая управляющая система могла бы интерпретировать поступивший координирующий сигнал γ своим особым образом, чтобы избежать этого, будем считать координирующие сигналы γ из Γ n -мерными векторами (γ1,..., γn), так что на вход i -й управляющей системы поступает только i -я компонента γi.
Управляющую систему С0 будем также называть координатором, так как ее выходные сигналы γ, γ Γ являются координирующими сигналами для систем Сi,..., Сn. Мы будем рассматривать только один вход для системы С0 - информацию w, получаемую посредством обратной связи от нижестоящих управляющих систем и используемую для формирования координирующих воздействий (координирующих сигналов) γ. В таком случае мы вправе считать, что управляющая система С0 по сути дела осуществляет отображение
С0: W → Γ
где W представляет собой множество информационных систем w, с помощью которых реализуется обратная связь.
Для того чтобы завершить описание двухуровневой сиcтемы должны уточнить характер информации, поступающей каналам обратной связи. Сигналы обратной связи zi поступают, на вход локальной управляющей системы Сi, содержат информацию относительно поведения процесса Р, поэтому мы предположим, что они связаны функциональной зависимостью с управляющим сигналом m, внешним возмущением ω и выходом y. Эту зависимость мы будем представлять в виде отображения
fi: M * Ω * Y → Zi
Аналогично поступающий по каналам обратной связи информационный сигнал w направляется в вышестоящую управляющую систему С0 и содержит в себе информацию относительно поведения нижестоящих управляющих систем; поэтому он по определению задается отображением
f0: Γ * Z * M → W,
 где Z = Z1 *... * Zn,
где Z = Z1 *... * Zn,
W - является (1) функцией координирующего сигнала у, (2) информационных сигналов обратной связи z = (z1,..., zn), получаемых нижестоящими управляющими системами, (3) и их управляющих воздействий m = (m1,..., mn).
Относительно указанных взаимосвязей между подсистем следует сделать два замечания.
· В явном виде не предусматривается прямая коммуникация между нижестоящими управляющими системами. В этом находит отражение тот факт, что мы прежде всего интересуемся только отношениями между смежными уровнями иерархии.
· Вышестоящая управляющая система непосредственно не взаимодействует с процессом.
Впрочем, это только видимость, так как на самом деле любая нижестоящая управляющая система может передать вышестоящей всю информацию о ходе протекавшего процесса.
Глава 7. ЗАДАЧИ ФИЛЬТРАЦИИ,
ИНТЕРПОЛЯЦИИ, ЭКСТРАПОЛЯЦИИ
7.1. Общие вопросы фильтрации
Фильтрацией в широком смысле называется любое преобразование обрабатываемых сигналов с целью изменения соотношения между их различными компонентами. Чаще всего путем фильтрации проводится выделение из сигнала его части, спектр которой лежит в определенной области (в полосе пропускания).
При фильтрации измерительных сигналов решаются два основных типа задач: выделение полезного сигнала, наблюдаемого на фоне помех, и частотный анализ.
Задачами первого типа являются:
· обнаружение детерминированного сигнала известной формы на фоне помех;
· оценка информативных параметров квазидетерминированных сигналов, наблюдаемых на фоне помех;
· фильтрация случайных сигналов.
Задачи частотного анализа сводятся к определению составляющих сигнала с некоторыми, в большинстве случаев дискретными, частотами.
При решении задач, связанных с анализом сигналов, фильтрация применяется для измерения искажений, формирования средних экспоненциальных значений и для подавления, усиления или отделения некоторых частотных составляющих или полос частот.
Фильтрацию можно классифицировать по роду преобразований на аналоговую и цифровую, а по расположению полос пропускания – на фильтрацию нижних частот (ФАЧ) (рис.7.1, а); фильтрацию верхних частот (ФВЧ) (рис.7.1, б); полосовую фильтрацию (ПФ), при которой полоса пропускания ограничена сверху и снизу (рис.7.1, в); заграждающую фильтрацию (ЗФ), при которой между двумя полосами пропускания, ограниченными снизу и сверху, имеется узкая полоса непропускания (рис.7.1, г).
Фильтрация может быть линейной и нелинейной. При линейной фильтрации в качестве фильтров используются динамические линейные системы, при нелинейной фильтрации – нелинейные. Линейная фильтрация используется гораздо чаще, чем нелинейная. Это объясняется, во-первых, сложностью анализа нелинейных систем, и, во-вторых, тем, что удовлетворительной вероятностной моделью большинства измерительных сигналов являются гауссовы случайные процессы, для которых линейные фильтры обеспечивают возможность выделения с требуемыми показателями полезной информации из смеси с помехой. Нелинейные фильтры находят применение для фильтрации импульсных помех с целью нахождения оценки информативного параметра сигнала, в качестве которой используется медиана плотности распределения вероятности.
 |
Рис. 7.1. Основные виды фильтрации сигналов по расположению полос
пропускания: а – нижних частот; б – верхних частот;
в – полосовая; г – заграждающая
Учитывая широкую распространенность, математическую обоснованность методов линейной фильтрации, значительно превосходящих методы нелинейной фильтрации, в дальнейшем будем рассматривать только линейную фильтрацию.
В зависимости от априорной определенности сведений о форме, характере изменения и параметрах полезного сигнала может быть:
· фильтрация постоянного или периодического полезного сигнала с наложенной на него случайной помехой;
· фильтрация изменяющихся во времени полезного сигнала и помехи;
· фильтрация сигналов в виде дискретных последовательностей.
Устройства, с помощью которых осуществляется намеренное селективное подавление отдельных составляющих сигнала, называют фильтрами.
Основной характеристикой фильтра является его амплитудно-частотная характеристика (АЧХ), определяемая как модуль комплексного частотного коэффициента передачи | K(jw) |. АЧХ часто изображают в логорифмическом масштабе в виде графика  , по которому можно определить логорифмическую крутизну:
, по которому можно определить логорифмическую крутизну:
 . (7.1)
. (7.1)
Являясь безразмерной величиной, не зависящей от масштабов по осям координат, c измеряется в децибелах на октаву (дБ/октава). В октавах измеряется интервал частот. Одна октава соответствует интервалу, в котором частота изменяется вдвое.
Идеальными называются фильтры нижних частот, верхних частот, полосовой, у которых полоса пропускания находится внутри интервалов 0-w1, w2-¥, w1-w2 соответственно. Причем внутри этих интервалов АЧХ постоянна, а вне интервалов равна нулю. Идеальный заграждающий (режекторный) фильтр имеет АЧХ, равную нулю в некоторой полосе частот, и постоянное значение вне этого интервала. Следовательно, у АЧХ идеальных фильтров на граничных частотах c равна бесконечности.
Реальные фильтры имеют АЧХ с конечной крутизной.
Фильтры разделяются также на физически реализуемые и физически неосуществимые.
Физически реализуемый фильтр – это такой фильтр, у которого сигнал на выходе не может появиться раньше, чем был подан сигнал на вход. Для физически реализуемого фильтра необходимо, чтобы соблюдалось условие казуальности:
 , (7.2)
, (7.2)
где h(t) – импульсная характеристика фильтра.
Вторым условием физической осуществимости фильтра является затухание импульсной характеристики со временем:
 .
.
Физически реализуемые фильтры должны отвечать условиям устойчивости. Во временной области – это условие абсолютной интегрируемости импульсной характеристики:
 . (7.3)
. (7.3)
В спектральной области устойчивость фильтра определяется критерием Пэли – Винера:
 . (7.4)
. (7.4)
В соответствии с этими условиями физически осуществимы только те фильтры, у которых АЧХ не имеют нулевых значений в некоторой полосе частот. Следовательно, все вышерассмотренные идеальные фильтры являются физически неосуществимыми.
Физически неосуществимые фильтры называют математическими фильтрами. Их можно осуществить с помощью цифровых систем обработки информации.
Идеализированные функции физически осуществимых реальных фильтров описываются асимптотическими АЧХ, имеющими прямолинейный участок в области пропускания (рис.7.2), острые углы при предельных частотах wg и постоянный логорифмический участок падения амплитуды в области запирания. В действительности коэффициент пропускания неоднократно варьируется (волнистость), переходная область скруглена (преждевременное падение амплитуды), падение амплитуды непостоянно, подавление отдельных частотных составляющих начинается далеко от предельной частоты и осуществляется неполностью.
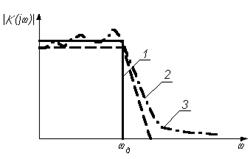 |
Рис. 7.2. АЧХ фильтра нижних частот: 1 – идеальная;
2 – идеализированная; 3 – реальная
Наряду с АЧХ и переходными характеристиками в ряде случаев представляет интерес фазочастотная характеристика. Чем сложнее фильтр, тем больше сдвиг фаз. Допустм только сдвиг фаз, пропорциональный частоте, при котором фазовые соотношения между различными частотными составляющими сигнала не нарушались бы при прохождении через фильтр. Наибольшее распространение получили реальные фильтры (см.рис.7.2): Гаусса, Бесселя, Баттерворта, Чебышева, Кауэра.
Характеристики фильтров различных типов показаны на рис.7.3 и в табл. 7.1 [18].
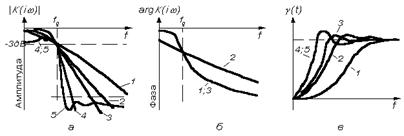
Рис. 7.3. Качественный вид амплитудной (а), фазовой (б) и переходной (в)
характеристик различных фильтров нижних частот с одинаковым числом полюсов: 1 – фильтр Гаусса; 2 – фильтр Бесселя; 3 – фильтр Баттерворта;
4 – фильтр Чебышева; 5 – фильтр Кауэра
Таблица 7.1
Сравнительная характеристика фильтров различных типов
| Наименование | Преимущества | Недостатки |
| Фильтры Гаусса | Отсутствие затруднений в реализации, отсутствие колебаний с чрезмерной амплитудой в переходной характеристике | Большое время нарастания переходной характеристики, резкое снижение амплитуды и заметный сдвиг фаз уже в области пропускания, пологий переход в области запирания |
| Фильтры Бесселя | Пологая и пропорциональная частоте форма фазовой характеристики в области пропускания, что означает малое искажение сигналов, имеющих составляющие различной частоты, практически полное отсутствие колебаний с чрезмерной амплитудой в переходной характеристике | Раннее падение амплитуды в области пропускания, полный переход к области запирания |
| Окончание табл.7.1 | ||
| Наименование | Преимущества | Недостатки |
| Фильтры Баттерворта | Короткое время нарастания по переходной характеристике; позднее начало падения амплитуды в области пропускания и более быстрый переход из области пропускания к области запирания | Непропорциональная частоте фазовая характеристика уже в начале области пропускания, что вызывает искажение сигнала по времени; колебания с чрезмерной амплитудой при переходном процессе, более продолжительное время установления колебаний |
| Фильтры Чебышева | Крутой переход из области пропускания к области затухания; АЧХ наиболее близко приближается к характеристике идеального фильтра | Сильная волнистость АЧХ в области пропускания; сильно изменяющаяся фазовая характеристика в области пропускания; колебания с чрезмерной амплитудой и более продолжительное время установления колебаний по переходной характеристике |
| Фильтры Кауэра (эллиптические фильтры), двойные фильтры Чебышева | Быстрый переход от области пропускания к области запирания; очень крутое падение амплитуды | Волнистость амплитудной характеристики в области пропускания и в области запирания; сильная зависимость сдвига фаз от частоты |
Предпочтение тому или иному типу фильтров дается в зависимости от цели его применения.
При использовании фильтрации для повышения помехоустойчивости сигналов измерительной информации наблюдаемый процесс чаще всего представляется в виде аддитивной смеси
 ,
,
где х(t) – полезный сигнал; x(t) – помеха.
Если помеха x(t) во всех случаях является случайной величиной, представляемой в виде шума, то сигнал х(t) может быть представлен в одном из трех видов: детерминированного сигнала известной формы, квазидетерминированного сигнала, случайного сигнала. В зависимости от того, чем представлен полезный сигнал, изменяется и постановка задачи фильтрации. Рассмотрим подробнее алгоритмы фильтрации для каждого из трех случаев представления полезного сигнала.
Глава 8. МЕТОДЫ И АЛГОРИТМЫ РЕШЕНИЯ ЗАДАЧ

