 2014-02-09
2014-02-09 3340
3340Структурная схема системы имеет вид:
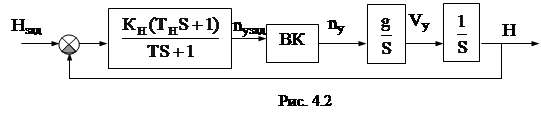 |
Особенность данной системы – только одна обратная связь по высоте. ВК системы является система стабилизации нормальной перегрузки. Как видно из рис. 4.2, выше, в контуре стабилизации высоты имеются два последовательно включенных интегрирующих звена, описывающих динамику траекторного движения свободного самолета. Для обеспечения структурной устойчивости и заданных показателей качества в прямую цепь введено реальное форсирующее звено

где ТН;Т – постоянные времени звена, причем ТН >> Т. Это соответствует введению дополнительного сигнала по производной отклонений от заданной высоты путем реального дифференцирования сигнала корректора высоты.
ПФ упрощенной модели ВК – статической системы стабилизации перегрузки (считаем привод безынерционным) имеет вид:
 (4.1)
(4.1)
На основании структурной схемы рис. 4.2 находим ПФ разомкнутого контура стабилизации высоты:
 , (4.2)
, (4.2)
где:
Выбор передаточного коэффициента KH и постоянной времени форсирующего звена производят из соображений обеспечения максимального быстродействия и хорошего качества переходного процесса. Для этого придерживаются выполнения следующих требований:
1. частота среза wср разомкнутой системы с ПФ (4.2) должна находиться на участке ЛАЧХ с наклоном – 20дб/дек;
2. должны соблюдаться условия:
 (4.3)
(4.3)
в диапазоне частот  .
.
Частотные характеристики, соответствующие ПФ (4.2), могут вычисляться по следующей приближенной формуле:
 (4.4)
(4.4)
Отсюда выражение для частоты среза, располагающейся именно в этом диапазоне частот, имеет вид:
 (4.5)
(4.5)
С учетом (4.3) и (4.5) получаем следующие формулы для выбора параметров системы стабилизации высоты:
 ;
; 
т.к. обычно  , то
, то .
.
Обеспечение структурной устойчивости и заданных показателей качества системы стабилизации высоты можно получить и за счет введения сигнала с измерителя вертикальной скорости полета (например, вариометра). Тогда стабилизация высоты полета будет осуществляться по сигналам отклонения от заданной высоты полета и ее производной, в этом случае отпадает необходимость в дифференцировании сигнала ошибки Н–Нзад. При этом закон управления заданной перегрузкой примет вид:
 (4.7)
(4.7)
Ему соответствует следующая структурная схема системы:
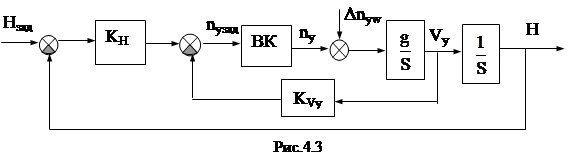 |
Где Dnyw – приведенная к выходу системы стабилизации перегрузки (ВК) ошибка, вызванная действием ветрового возмущения aw (см. I часть конспекта лекций, стр.18). Тогда ПФ замкнутой системы в режиме управления примет вид:
 (4.8)
(4.8)
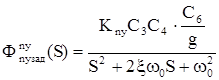
Подставляя в (4.8) выражение для ПФ ВК (4.1) получим:
 (4.9)
(4.9)
Из анализа полученной ПФ можно сделать вывод: ПФ СУH не содержит нулей и коэффициенты при старших степенях переменной sхарактеристического многочлена определяются только коэффициентами знаменателя ПФ системы стабилизации перегрузки, а искомые передаточные числа СУH входят в младшие коэффициенты характеристического многочлена. Для выбора передаточных чисел таких систем удобно использовать коэффициентный метод синтеза (Г.В. Серпионов, А.В. Березуев, П.В. Мулин "Введение в проектирование СУ самолетами", МАИ 1995 г.).
Стабилизация высоты при полете в турбулентной атмосфере. Турбулентность атмосферы представляет собой стационарный случайный процесс. В этом случае критерием, определяющим точность системы, является среднее квадратическое значение ошибки (СКО) стабилизации. Величина СКО
где SH(w) – спектральная плотность ошибки DH=H, которую можно найти, используя связь между спектральными плотностями величин на входе и выходе линейной динамической системы:
 (4.10),
(4.10),
где – модуль частотной функции системы стабилизации высоты на ветровое возмущение aw. Используя правила эквивалентных преобразований структурных схем для системы рис. 4.3, находим выражение для ПФ функции системы стабилизации высоты на ветровое возмущение:
– модуль частотной функции системы стабилизации высоты на ветровое возмущение aw. Используя правила эквивалентных преобразований структурных схем для системы рис. 4.3, находим выражение для ПФ функции системы стабилизации высоты на ветровое возмущение:
 (4.11)
(4.11)
Эффект применения системы стабилизации высоты иллюстрируется на рис. ниже:
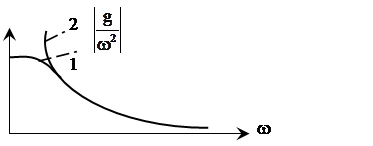 |








