 2014-02-09
2014-02-09 1617
1617Система стабилизации высоты полета самолета
Рис. 4.4
где: 1 – модуль частотной функции системы стабилизации высоты на ошибку стабилизации перегрузки  ; 2 – модуль частотной функции системы стабилизации перегрузки по высоте (KH=0, KVy=0).
; 2 – модуль частотной функции системы стабилизации перегрузки по высоте (KH=0, KVy=0).
Т.е. применение системы стабилизации высоты повышает точность выдерживания заданной траектории при полете в возмущенной атмосфере за счет уменьшения отклонений в низкочастотной области.
Преимущество: отпадает необходимость дифференцирования сигнала ошибки
Hзад–Н и система замыкается по сигналу с надежного датчика – гировертикали, практически лишенного запаздывания. Недостаток – худшая эффективность парирования ветровых возмущений.
Полагая, что скорость полета самолета постоянна (стабилизируется автоматом тяги) линеаризованные уравнения продольного движения самолета можно записать в виде (С9=0):
 (4.12)
(4.12)
Где:

1 – уравнение сил;
2 – уравнение моментов;
3, 4 – кинематические уравнения.
Из системы уравнений (4.12) можно получить ПФ:
 (4.13)
(4.13)
 (4.14)
(4.14)
 (4.15)
(4.15)
Разделив ПФ свободного самолета (4.13) и (4.14), выразим wz через ny:
 ,
,  (4.16)
(4.16)
Разделив ПФ (4.15) и (4.13), выразим соответственно H через wz:
 (4.17)
(4.17)
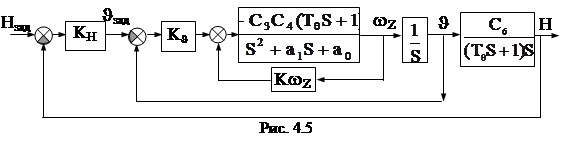
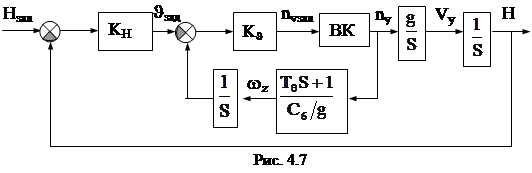
Это позволяет представить структурную схему системы стабилизации высоты с самостоятельным контуром стабилизации угла тангажа в виде:
 |
ПФ замкнутой системы стабилизации угла тангажа имеет вид:
 (4.18)
(4.18)
где:
 (4.19)
(4.19)
Знаменатель ПФ (4.19) можно представить в виде произведения двух сомножителей:
 .
.
Как показывают расчеты при реальных значениях KwZ в первом приближении можно принять:
T1 » Tq.
При этом допущении выражение (4.18) упрощается:
 (4.21)
(4.21)
Где
 (4.22)
(4.22)
С учетом приближенного выражения (4.21) ПФ разомкнутой системы стабилизации высоты примет вид:
 (4.23)
(4.23)
Передаточный коэффициент KH выбирают из условия, чтобы частота среза АЧХ (4.23) располагалась левее граничной частоты  , а именно:
, а именно:
 (4.24)
(4.24)
В этом случае АЧХ (4.23) приближенно будет равна:
 (4.25)
(4.25)
Тогда с учетом (4.24) получим выражение для определения
Функциональная схема канала РВ СУH (4.25) имеет вид:
где ГВ – гировертикаль;
ДУС – датчик угловых скоростей;
КВ – корректор высоты;
ЭГРП – электрогидравлический рулевой привод.
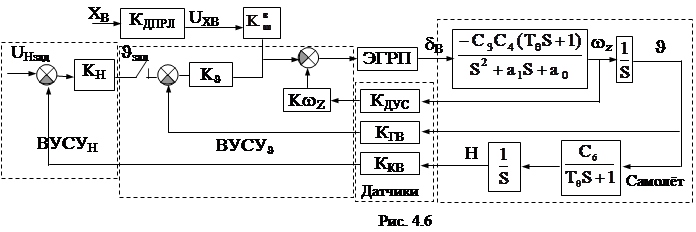
Структурная схема системы стабилизации высоты полета с контуром стабилизации угла тангажа, построенным на базе перегрузочного контура, представлена на рис. ниже:
 |
Тема 8. (4 ч., СРС 2 ч.)








