 2014-02-13
2014-02-13 516
516Определение состязаний сигналов в комбинационных дискретных
Ранее было установлено, что в комбинационных ДУ, построенных на бесконтактных элементах, из-за задержки прохождения сигнала через инвертор во время переходного процесса при изменении входного сигнала x с 1 на 0 (x = (1 → 0)) возникает такая ситуация, когда оба сигнала x и  в течение некоторого времени τ равны нулю (x == 0), а при изменении входного сигнала x с 0 на 1 (x = (0 → 1)) оба сигнала x и в течение некоторого времени τ равны единице (x == 1).
в течение некоторого времени τ равны нулю (x == 0), а при изменении входного сигнала x с 0 на 1 (x = (0 → 1)) оба сигнала x и в течение некоторого времени τ равны единице (x == 1).
Проанализируем последствия, к которым могут привести неодновременные изменения значений сигналов x и во время переходных процессов (вследствие чего нарушается выполнение тождеств  или
или  ) в ДУ, функциональные схемы которых построены в соответствие с различными формами логических функций.
) в ДУ, функциональные схемы которых построены в соответствие с различными формами логических функций.
Рассмотрим переходные процессы в дискретном устройстве, функциональная схема которого (Рисунок 5.18) построена в соответствии с дизъюнктивной нормальной формой логической функции  где A, B, C – элементарные конъюнкции, зависящие от остальных переменных логической функции.
где A, B, C – элементарные конъюнкции, зависящие от остальных переменных логической функции.
|
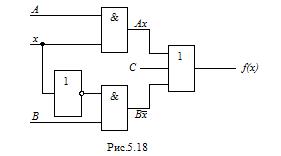
Рассмотрим случай, когда значения переменных логической функции (за исключением x) выбраны таким образом, что A = 1, B = 1, C = 0, а входной сигнал x изменяет свое значение с 1 на 0, что будем обозначать x = (1 → 0).
В соответствии с логическим уравнением f (x) выходной сигнал ДУ при этих условиях должен быть равен 1 независимо от значения сигнала x, так как при x = 1 Ax = 1, а при x = 0  Однако при изменении значения входного сигнала x = (1 → 0) вследствие задержки сигнала на элементе НЕ на некоторое время τ оказывается, что x == 0. Тогда
Однако при изменении значения входного сигнала x = (1 → 0) вследствие задержки сигнала на элементе НЕ на некоторое время τ оказывается, что x == 0. Тогда  , что приводит к ложному отсутствию выходного сигнала ДУ во время переходного периода. Такое явление будет называть риском в единице.
, что приводит к ложному отсутствию выходного сигнала ДУ во время переходного периода. Такое явление будет называть риском в единице.
|
 |
Временные диаграммы, показывающие характер изменения сигнала ДУ в рассматриваемом случае, представлены на рисунке 5.19, а. На рисунке 5.19, б приведены временные диаграммы, соответствующие изменению сигнала x = (0 → 1) при тех же значениях A, B, C. Как следует из графиков, нарушений выходного сигнала ДУ не происходит, потому что при x =
= 1 выходной сигнал ДУ сохраняет единичное значение.
Для наглядности при построении временных диаграмм принято допущение, что элементы И, ИЛИ являются безынерционными, так как учет задержек в этих элементах приводит к сдвигу соответствующих сигналов вправо по оси t, но не изменяет полученной картины.
Рассмотрим функциональную схему ДУ (Рисунок 5.20), которая построена в соответствии с конъюнктивной нормальной формой логической функции  где A, B, C – элементарные дизъюнкции, зависящие от остальных переменных, входящих в выражение для f (x).
где A, B, C – элементарные дизъюнкции, зависящие от остальных переменных, входящих в выражение для f (x).
Проведем анализ влияния значений сигнала x в переходные периоды на выходной сигнал этой схемы. Пусть значения остальных переменных выбраны таким образом, что A = B = 0, C = 1, а сигнал изменяет свое значение с нуля на единицу: x = (0 → 1). В статическом режиме x = 1 (= 0) и, наоборот, выходной сигнал дискретного устройства
 |
| |||||
| |||||
|
 равен нулю, так как одна из дизъюнкций
равен нулю, так как одна из дизъюнкций  или
или  обязательно равна нулю. В переходный же период при изменении x = (0 → 1) имеется промежуток времени τ, когда вследствие задержки на элементе НЕ x == 1. Это приводит к тому, что на выходе ДУ появляется ложный выходной сигнал. Такое явление будем называть риском в нуле.
обязательно равна нулю. В переходный же период при изменении x = (0 → 1) имеется промежуток времени τ, когда вследствие задержки на элементе НЕ x == 1. Это приводит к тому, что на выходе ДУ появляется ложный выходной сигнал. Такое явление будем называть риском в нуле.
 Явления неправильного функционирования ДУ в переходные периоды типа риск в нуле или риск в единице будем называть состязаниями сигналов типа риск в нуле или типа риск в единице.
Явления неправильного функционирования ДУ в переходные периоды типа риск в нуле или риск в единице будем называть состязаниями сигналов типа риск в нуле или типа риск в единице.
|
 |
Временные диаграммы, показывающие характер изменения сигналов в рассмотренном случае, представлены на рисунке 5.21, б. На рисунке 5.21, а приведены диаграммы, соответствующие изменению сигнала x = (1 → 0). Видно, что в этом случае неправильный выходной сигнал на выходе ДУ не появляется. Это объясняется тем, что при x =
= 0 выходной сигнал сохраняет нулевое значение.
Итак, можно сделать следующий вывод, который легко может быть доказан.
В дискретных устройствах, функциональная схема которых построена в соответствии с ДНФ логической функции, возможны состязания сигналов только типа риск в единице, причем только при изменении значения состязующегося сигнала с 1 на 0. В дискретных устройствах, функциональная схема которых построена в соответствии с КНФ функции, возможны состязания сигналов только типа риск в нуле, причем только при изменении значения состязующегося сигнала с 0 на 1.
Очень часто дискретные устройства строят на элементах, реализующих инверсные формы ДНФ или КНФ (элементы ИЛИ-НЕ, И-НЕ), например:

Можно легко показать, что использование вместо сигналов их отрицаний и наоборот, а также взаимная замена конъюнкций и дизъюнкций не могут привести к появлению состязаний в схеме, в которой их не было, или исключить состязания в схеме, если они в ней были.
Отсюда следует важный для практики вывод. При анализе переходных процессов в ДУ, построенном на логических элементах И-НЕ, необходимо преобразовать выражение, описывающее условия его работы, в ДНФ и провести его исследование. Например:

При анализе переходных процессов в ДУ, схема которого построена на логических элементах ИЛИ-НЕ, необходимо преобразовать выражение, описывающее условия его работы, в КНФ и провести его исследование. Например:

Очевидно, что состязания сигналов в схеме ДУ могут возникнуть только в тех случаях, когда при переходе от одного состояния входов ДУ к соседнему, т.е. отличающемуся значением только одного из входов (xi), значение выходного сигнала должно оставаться неизменным.
В результате состязаний сигналов на выходах комбинационного автомата или его отдельных блоков возможно появление:
- одного или нескольких ложных импульсов при нулевом значении сигналов до и после переходного периода;
- одной или нескольких пауз при единичном значении сигнала до и после переходного периода;
- одного или нескольких импульсов, предшествующих изменению выходного сигнала.
Количество ложных импульсов или ложных пауз при каждом переходе зависит от числа путей для изменяющего сигнала в автомате и числа одновременно изменяющихся сигналов на его входах. Длительность импульса или паузы определяется случайным сочетанием длительности задержки по отдельным путям.
Состязания сигналов могут быть допустимыми (некритическими) и недопустимыми (критическими). Если в результате состязаний в автоматах не появляются импульсы или паузы, которые могут быть восприняты как выходные сигналы, то такие состязания являются допустимыми. В противном случае состязания будут недопустимыми.
Устранять состязания сигналов в схеме ДУ совершенно необходимо, когда появляющиеся в результате состязаний кратковременные импульсы (паузы) могут быть восприняты последующими устройствами как полезный сигнал.
Особую опасность представляют подобные явления в тех случаях, когда выходные сигналы ДУ поступают на входы запоминающих элементов (элементов памяти) и могут привести к их неправильному переключению.
В тех случаях, когда выводы ДУ подключаются к исполнительным элементам, имеющим большую инерционность, или когда в результате анализа установлено, что состязания сигналов возникают при переходах между такими парами соседних входных наборов, которые не встречаются при работе устройства, принимать специальные меры по их устранению не имеет смысла.








