 2015-01-30
2015-01-30 630
630Обычно система ЦОС представляет собой комплексную аппаратную схему, включающую кроме DSP ряд внешних устройств (рис.3).
Как показано на рис.3, в дополнение к обработке сигнала, поступающего из внешнего АЦП или КОДЕКА, процессор должен "уметь" обрабатывать сигналы, поступающие от хост-процессора и сигналы управления от пользователя. В нормальном режиме DSP работает синхронно с АЦП или КОДЕКОМ, принимая или выдавая данные с постоянным временным интервалом (синхронно с сигналами тактового генератора) - для обеспечения этого на плате обычно используется один тактовый генератор. В случае нарушения синхронизации данные будут утеряны.
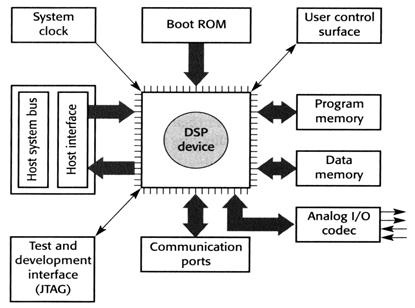
Рис.3.
В то же время DSP может обмениваться данными с хост-процессором (например, получение управляющей информации для выполнения алгоритма) или от схемы управления пользователем (например, увеличение громкости выходного сигнала). Эти события происходят асинхронно, т.е. в произвольные моменты времени. Для обработки таких событий могут использоваться две схемы:
- ввод/вывод данных с последовательным опросом (POLLED I/O), когда процессор просто "регулярно" проверяет состояния на определенных ножках и принимает решение в зависимости от уровня сигнала. Хотя эта схема проста, она приводит к снижению производительности, т.к. часть опросов выполняется "вхолостую";
- управление с использованием прерываний. Как обычно, такая схема требует выделения таблицы векторов прерываний для обработки каждого внешнего сигнала и написания программно обработчика прерывания.
Форматы представления данных в сигнальных процессорах. Сравнительные особенности процессоров, ориентированных на обработку ФЗ- и ПЗ-данных. Оценка необходимой разрядности процессора.








