 2015-01-30
2015-01-30 887
8874.1. Фотографии прибора «БалКом-4» представлены на рис. 4.1 и 4.2.
Прибор (см. рис. 4.1) состоит из измерительного блока 6, четырёх датчиков вибрации 1, 2, 3, 4, датчика фазового угла 5 и портативного компьютера (нетбука или ноутбука) 7.
В комплект поставки прибора также включена оснастка, необходимая для проведения балансировки механизмов в полевых условиях. В частности магниты, используемые для установки на объекте датчиков вибрации, магнитный штатив, используемый для установки датчика фазового угла и весы.
Корпус измерительного блока прибора выполнен из пластика ABS серого цвета.
На лицевой стенке корпуса расположены разъёмы Х1, Х2 Х3, Х4, предназначенные для подключения датчиков вибрации соответственно к 1, 2, 3 и 4 измерительным каналам прибора, а также разъём Х5, используемый для подключения датчика фазового угла.
Из задней стенки датчика выведен кабель с USB-разъёмом Х6, предназначенный для подключения измерительного блока к компьютеру.
 | |||||
 | |||||
|
|



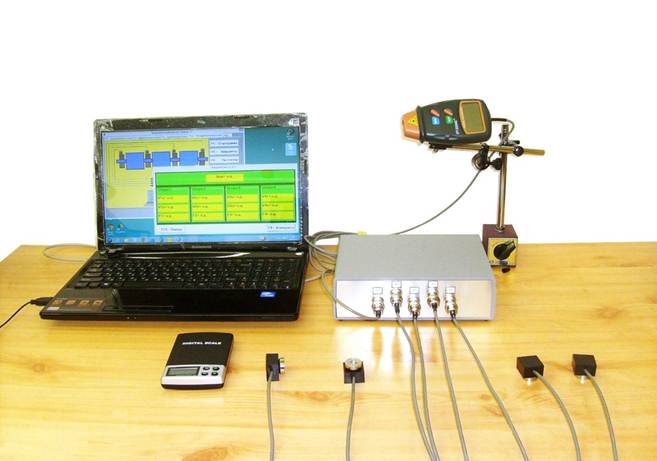
Рис. 4.1. Прибор для балансировки «БалКом-4» в комплекте
 4.2. Функциональная схема прибора приведена на рис. 4.2.
4.2. Функциональная схема прибора приведена на рис. 4.2.
Прибор включает в себя следующие конструктивные единицы: измерительный блок 6, датчики вибрации 1, 2, 3, 4, датчик фазового угла (лазерный тахометр) 5, портативный компьютер 7
Как видно из схемы, в корпусе измерительного блока установлены модуль 8 АЦП/ЦАП Е154 (или Е14-140-М),к которому подключена плата 9 нормирующих преобразователей сигналов датчиков.
На плате 9 собраны основные узлы, обеспечивающие нормирование сигналов с датчиков, в том числе:
- интеграторы 10, 11, 12, 13 сигналов датчиков вибрации по первому, второму, третьему и четвёртому измерительным входам;
- преобразователь 14 сигнала датчика фазового угла;
- преобразователь 15 питания +5B/+3B;
- преобразователь 16 питания DC-DC +5B/+12B.
Принцип действия прибора основан на измерении механических колебаний, которые имеют место на корпусах машин при их работе.
Для преобразования механических колебаний в электрический сигнал используются датчики вибрации – емкостные интегральные акселерометры 2-5. Для определения фазовых характеристик сигнала используется оптический лазерный тахометр 6, работающий на отражение.




 | |||
 | |||
 |
Рис. 4.2. Функциональная схема прибора «БалКом-4».
Под воздействием механических колебаний на выходе датчика вибрации формируется электрический аналоговый сигнал пропорциональный виброускорению, который подается на соответствующий вход измерительного блока 6 прибора.
Далее после преобразования (интегрирования, полосовой фильтрации) видоизмененный сигнал пропорциональный виброскорости поступает на соответствующий аналоговый вход модуля 8 АЦП/ЦАП Е154 (Е14-140-М), в котором преобразуется в цифровую форму.
В случае необходимости измерения частоты вращения и/или фазовых характеристик вибрационного сигнала дополнительно используется импульсный сигнал, формируемый датчиком фазового угла 5, который после нормирования также подается на соответствующий аналоговый вход модуля 8.
В модуле 8 АЦП/ЦАП производится предварительная цифровая обработка аналоговых сигналов, поступающих с датчиков. После чего оцифрованные сигналы по шине USB передаются в портативный компьютер 7, в котором по заданной программе осуществляется дальнейшая обработка цифрового сигнала (фильтрация, интерполяция, Фурье – анализ, вычисление параметров балансировки и т.д.).
Полученные результаты (численные значения амплитуды и фазы вибрации, частоты вращения и т.п.) выводятся на дисплей и запоминаются в компьютера памяти.
В зависимости от выбранного режима балансировки (одна, две, три или четыре плоскости коррекции) последовательно выполняется соответствующее количество измерений вибрации объекта в исходном состоянии и после установки пробного груза, используемого для тарировки прибора.
По результатам измерений в цифровом виде осуществляется решение задачи балансировки, после чего на дисплей компьютера выводятся данные о величине и угле установки корректирующей массы.
Роль пользователя сводится при этом к установке пробных и корректирующих грузов на балансируемом роторе и нажатию по готовности соответствующих клавиш на клавиатуре компьютера (или виртуальных клавиш на дисплее).
Весь процесс балансировки, включающий в себя измерение, обработку сигнала и вычисление результата, выполняется в автоматизированном режиме по программам, находящимся в памяти компьютера.








