 2015-01-30
2015-01-30 817
817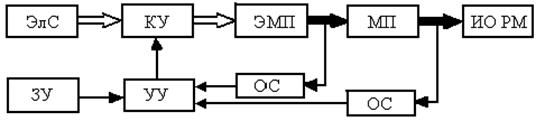
Рис. 3.1. Функциональная схема электропривода:
ЭлС – электрическая сеть;
КУ – коммутационное устройство;
ЭМП – электромеханический преобразователь (двигатель);
МП – механический преобразователь (редуктор);
ИО РМ – исполнительный орган рабочей машины;
ЗУ – задающее устройство;
УУ – устройство управления;
ОС – обратная связь
В таких приводах напряжение сети, как правило, остается неизменным и с помощью коммутирующего устройства по сигналу УУ ЭД подключается к электрической сети.
В приводах обычно используется контактная и бесконтактная аппаратура релейного действия. Большое место среди этих приводов занимают ЭП без регулирования скорости. Учитывая большие пусковые токи и моменты ЭД в таких ЭП, приходится управлять процессами пуска и торможения, накладывая ограничения на пусковой ток и пусковой момент. В таких системах, как правило, используют параметрические способы управления координатами ЭП. В зависимости от способа управления различают управление двигателем в функции времени (с контролем времени), в функции скорости (с контролем скорости), в функции тока (с контролем тока), в функции пути (с контролем пути). Последний способ нашел широкое применение в робототехнических устройствах и широко встречается на практике под названием «позиционирование».








