2015-01-30
2015-01-30 1429
14291. Перечислите радиотехнические методы измерения местоположения объектов на основе использования линий положения и поясните их сущность.
2. Перечислите виды радиотехнических систем и поясните их сущность.
3. Начертите обобщенную структурную схему импульсного дальномера и поясните принцип его работы.
4. Начертите структурную схему фазового дальномера и поясните его работу.
5. Изложите принцип действия частотного дальномера.
6. Перечислите известные Вам методы обзора пространства в радиолокации и поясните их сущность.
7. Какие пеленгаторы называются моноимпульсными? Почему?
8. В чем заключается принцип когерентного метода селекции подвижных целей в радиолокации?
9. Что такое пассивная радиолокация?
10. Что такое “потенциальная точность измерения дальности”?
11. Что такое разрешающая способность по дальности?
12. Как и почему дальность действия радиолокационных станций зависит от длины волны?
13. Какие радионавигационные системы называют фазовыми? Приведите пример.
14. Какие сигналы в радиотехнике называют когерентными? Приведите пример когерентных сигналов.
15. Что такое “согласованный фильтр”?
16. В чем заключается физический принцип измерения радиальной скорости объектов в радиолокации и радионавигации?
17. Какие сигналы в радиолокации и радионавигации называют сложными? Приведите пример.
18. Зачем в системах посадки самолетов используются радиомаяки? Изложите принцип их работы.
19. Начертите обобщенную структурную схему спутниковой радионавигационной системы.
20. Почему и как отражения радиоволн от земли влияют на дальность действия радиолокационных станций?
Вопрос 1. Перечислите радиотехнические методы измерения местоположения объектов на основе использования линий положения и поясните их сущность. Наибольшее распространение в радиолокации и радионавигации получил метод позиционных линий В основе метода лежит понятие поверхности положения - такой поверхности в пространстве, на которой измеряемая радиотехническая величина постоянна. Непосредственно радиотехническими методами могут быть измерены расстояние, разность расстояний и направление. Рассмотрим соответствующие поверхности положения. 1) Поверхность равных дальностей, R=const. Очевидно, это сфера. Пересечение сферы с плоскостью (например, с плоскостью земли) дает линию положения - окружность (рис.1). Ее уравнение в полярных координатах   Рисунок 1 – линия равных расстояний. 2) Поверхность равных пеленгов (направлений), α=const. Очевидно, это плоскость, имеющая заданную пространственную ориентацию Если пеленг отсчитывается в горизонтальной плоскости от географического меридиана (направление север-юг), его называют истинным пеленгом или азимутом. Пересечение плоскостью равных азимутов поверхности земли дает прямую линию равных пеленгов (рис.2). Рисунок 1 – линия равных расстояний. 2) Поверхность равных пеленгов (направлений), α=const. Очевидно, это плоскость, имеющая заданную пространственную ориентацию Если пеленг отсчитывается в горизонтальной плоскости от географического меридиана (направление север-юг), его называют истинным пеленгом или азимутом. Пересечение плоскостью равных азимутов поверхности земли дает прямую линию равных пеленгов (рис.2).  Рисунок 2 – линия равных пеленгов. 3) Поверхность равных разностей расстояний – поверхность, на которой разность расстояний до двух фиксированных точек пространства остается постоянной. В пространстве это гиперболоид, а на поверхности земли - гипербола На рис.3 точки A и B — точки с известными координатами, RА=RВ=RAB=const — уравнение линии равных разностей расстояний, RAB=cΔtAB, где ΔtAB— разность времени распространения сигнала от точки О до точек А и В. Принципиально важно, что в этом методе расстояния RA и RB не измеряются, а измеряется их разность RAB. Рисунок 2 – линия равных пеленгов. 3) Поверхность равных разностей расстояний – поверхность, на которой разность расстояний до двух фиксированных точек пространства остается постоянной. В пространстве это гиперболоид, а на поверхности земли - гипербола На рис.3 точки A и B — точки с известными координатами, RА=RВ=RAB=const — уравнение линии равных разностей расстояний, RAB=cΔtAB, где ΔtAB— разность времени распространения сигнала от точки О до точек А и В. Принципиально важно, что в этом методе расстояния RA и RB не измеряются, а измеряется их разность RAB.  Рисунок 3 – линия равных разностей расстояний. Вопрос 2. Перечислите виды радиотехнических систем и поясните их сущность. Радиотехническими называют такие системы, в которых переносчиком информации являются радиоволны. Радиотехнические системы можно разделить на следующие классы: — системы передачи информации; Рисунок 3 – линия равных разностей расстояний. Вопрос 2. Перечислите виды радиотехнических систем и поясните их сущность. Радиотехническими называют такие системы, в которых переносчиком информации являются радиоволны. Радиотехнические системы можно разделить на следующие классы: — системы передачи информации; | — радиолокационные системы; — радионавигационные системы; — радиоастрономические системы. Класс систем передачи информации очень широк. Сюда относятся радиовещание и телевидение, многоканальная цифровая и аналоговая радиосвязь, системы передачи команд, системы телеметрии и пр. Радиолокация — область науки и техники, охватывающая методы и средства обнаружения, определения координат и параметров движения различных объектов. Радиолокация как область военной техники возникла в середине тридцатых годов прошлого столетия. Радиолокация и сейчас играет ключевую роль в вооружении армий развитых государств. На нее возлагаются функции обнаружения наземных, надводных, воздушных и космических целей, определения их координат, параметров движения, а также управление оружием. Но в современном мире задачи, решаемые с помощью радиолокации, не сводятся только к военному делу. Объекты радиолокационного наблюдения принято называть радиолокационными целями или просто целями. В основе слова радионавигация лежит английское слово Navy — флот. 100 лет назад навигацией называли науку о вождении морских судов. Основными средствами навигации служили компас и астрономические приборы. Сегодня навигация — наука о способах и средствах вождения надводных, подводных, воздушных и космических кораблей, наземных транспортных средств. Традиционные средства навигации уступили место радиотехническим, основанным на использовании источников радиоизлучения, расположенных на поверхности земли или на искусственных спутниках земли. Радионавигационные средства не зависят от погоды, более точны, удобны и оперативны, чем традиционные. Радиоастрономия — астрономия в радиодиапазоне. Радиоастрономические системы предназначены для исследования Вселенной по существующим в ней радиоизлучениям. Наблюдения на максимально далеких расстояниях существенны для понимания возникновения и характера той Вселенной, в которой мы живем, а эти знания в свою очередь дают ключ к пониманию ее конечной судьбы. Иногда еще один класс систем — системы радиоуправления. Управлять по радио можно разнообразными объектами, но под этим термином обычно понимают управление беспилотными летательными аппаратами. При всей сложности комплексов радиоуправления, они состоят из систем передачи информации, радиолокационных и радионавигационных систем. Перечисленные радиосистемы имеют много общего как в алгоритмах обработки сигналов, так и в схемах построения аппаратуры. | Вопрос 3: Начертите обобщенную структурную схему импульсного дальномера и поясните принцип его работы. Характерной особенностью импульсных дальномеров является то, что излучаемый сигнал представляет собой последовательность радиоимпульсов Реализации дальномеров входящих в состав радиолокационных либо радионавигационных систем могут сильно различаться между собой. Однако все они имеют некоторые характерные особенности (рис.1). 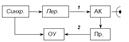 Рис. 1 - Обобщенная структурная схема импульсного дальномера. На схеме АК - антенный коммутатор, ОУ - оконечное устройство. На рис.2 представлены эпюры напряжений на выходе передатчика (1) и приемника (2). Задержка между ними измеряется в оконечном устройстве ОУ для расчета дальности по формуле Рис. 1 - Обобщенная структурная схема импульсного дальномера. На схеме АК - антенный коммутатор, ОУ - оконечное устройство. На рис.2 представлены эпюры напряжений на выходе передатчика (1) и приемника (2). Задержка между ними измеряется в оконечном устройстве ОУ для расчета дальности по формуле  Излучаемую последовательность импульсов обычно считают периодической, хотя принципиальной необходимости периодичности излучения нет. Поскольку прием и передача импульсов разделены по времени, одна антенна используется и на передачу и на прием. Излучаемую последовательность импульсов обычно считают периодической, хотя принципиальной необходимости периодичности излучения нет. Поскольку прием и передача импульсов разделены по времени, одна антенна используется и на передачу и на прием.  Рис 2 - Эпюры напряжений в схеме рис. 1. Переключение прием-передача осуществляется антенным коммутатором АК, который должен надежно закрывать приёмник на время передачи и не допустить шунтирования цепей приемника передатчиком во время приема. В схеме на рис. 1 коммутация выполняется под действием излучения передатчика Для этой цели могут использоваться и специальные видеоимпульсы, генерируемые синхронизатором. В схемах АК используются газовые разрядники, диоды, Y - - циркуляторы, отрезки длинных линий. Рассмотрим для примера схему АК, основанную на использовании газовых разрядников и четвертьволновых отрезков длинных линий. На рис. 3а представлены эпюры напряжений и токов в короткозамкнутой и разомкнутой линиях передачи. Видно, что входное сопротивление короткозамкнутой линии стремится к бесконечности, а разомкнутой - к нулю. На рис. 3б представлена схема АК, в которой используются эти свойства четвертьволновых отрезков линий передачи. Установленные в схеме газовые разрядники под действием излучения передатчика становятся короткозамыкателями, что и обеспечивает работу коммутатора. Недостаток импульсных дальномеров - наличие “мертвой зоны”, Рис 2 - Эпюры напряжений в схеме рис. 1. Переключение прием-передача осуществляется антенным коммутатором АК, который должен надежно закрывать приёмник на время передачи и не допустить шунтирования цепей приемника передатчиком во время приема. В схеме на рис. 1 коммутация выполняется под действием излучения передатчика Для этой цели могут использоваться и специальные видеоимпульсы, генерируемые синхронизатором. В схемах АК используются газовые разрядники, диоды, Y - - циркуляторы, отрезки длинных линий. Рассмотрим для примера схему АК, основанную на использовании газовых разрядников и четвертьволновых отрезков длинных линий. На рис. 3а представлены эпюры напряжений и токов в короткозамкнутой и разомкнутой линиях передачи. Видно, что входное сопротивление короткозамкнутой линии стремится к бесконечности, а разомкнутой - к нулю. На рис. 3б представлена схема АК, в которой используются эти свойства четвертьволновых отрезков линий передачи. Установленные в схеме газовые разрядники под действием излучения передатчика становятся короткозамыкателями, что и обеспечивает работу коммутатора. Недостаток импульсных дальномеров - наличие “мертвой зоны”, |
где  - время восстановления антенного коммутатора. - время восстановления антенного коммутатора.   Рис. 3 - Антенный коммутатор с газовыми разрядниками. Максимальная однозначно измеряемая дальность определяется формулой Рис. 3 - Антенный коммутатор с газовыми разрядниками. Максимальная однозначно измеряемая дальность определяется формулой  , где , где  - период следования зондирующих импульсов. Точность измерения дальности оценим дисперсией случайной погрешности, считая, что систематические погрешности устранены калибровкой аппаратуры. Дисперсия случайной погрешности измерения дальности определяется формулой - период следования зондирующих импульсов. Точность измерения дальности оценим дисперсией случайной погрешности, считая, что систематические погрешности устранены калибровкой аппаратуры. Дисперсия случайной погрешности измерения дальности определяется формулой  , (2) где , (2) где  - дисперсия шумовой составляющей погрешности, - дисперсия шумовой составляющей погрешности,  - дисперсия погрешности, вызванной неидеальностью среды распространения радиоволн, - дисперсия погрешности, вызванной неидеальностью среды распространения радиоволн,  - дисперсия погрешности вызванной неидеальностью измерительной аппаратуры. Дисперсия шумовой составляющей при оптимальном построении аппаратуры характеризует потенциальную точность измерения - дисперсия погрешности вызванной неидеальностью измерительной аппаратуры. Дисперсия шумовой составляющей при оптимальном построении аппаратуры характеризует потенциальную точность измерения  , (3) где , (3) где  - дисперсия эффективной оценки временной задержки, - дисперсия эффективной оценки временной задержки,  - спектральная плотность мощности собственного шума приемника, приведенного ко входу, k - постоянная Больцмана, - спектральная плотность мощности собственного шума приемника, приведенного ко входу, k - постоянная Больцмана,  - шумовая температура приемника, E — энергия сигнала за время измерения, - шумовая температура приемника, E — энергия сигнала за время измерения,  - среднеквадратичная ширина спектра сигнала. Дисперсия - среднеквадратичная ширина спектра сигнала. Дисперсия  обусловлена флуктуациями скорости распространения, рефракцией и многопутностью (в частных случаях) распространения радиоволн. Среднеквадратические флуктуации обусловлена флуктуациями скорости распространения, рефракцией и многопутностью (в частных случаях) распространения радиоволн. Среднеквадратические флуктуации  , если не измерять параметры среды и не вносить соответстующих поправок. Общие причины аппаратурных погрешностей: · неодновременность излучения зондирующего импульса и запуска оконечного устройства (неточность синхронизации); · задержка сигнала в приемнике; , если не измерять параметры среды и не вносить соответстующих поправок. Общие причины аппаратурных погрешностей: · неодновременность излучения зондирующего импульса и запуска оконечного устройства (неточность синхронизации); · задержка сигнала в приемнике; | неточность отсчетного устройства; обусловленное тем, что прием отраженных сигналов невозможен, пока идет излучение. Минимальная измеряемая дальность определяется формулой  , · нелинейность развертки. В целом величина , · нелинейность развертки. В целом величина  зависит от конкретного построения дальномера. Важной характеристикой дальномера является разрешающая способность - минимальное расстояние между целями, при котором дальность до каждой из них может быть измерена отдельно. Разрешающая способность складывается из двух составляющих: потенциальной разрешающей способности зависит от конкретного построения дальномера. Важной характеристикой дальномера является разрешающая способность - минимальное расстояние между целями, при котором дальность до каждой из них может быть измерена отдельно. Разрешающая способность складывается из двух составляющих: потенциальной разрешающей способности  , определяемой зондирующим сигналом, и ее ухудшения оконечным устройством , определяемой зондирующим сигналом, и ее ухудшения оконечным устройством  : :  (4) Потенциальная разрешающая способность находится по формуле: (4) Потенциальная разрешающая способность находится по формуле:  , где , где  - сжатие принимаемого сигнала по времени в приемном устройстве. Если сжатие не производится то - сжатие принимаемого сигнала по времени в приемном устройстве. Если сжатие не производится то  . Ухудшение разрешающей способности оконечным устройством зависит от его конкретного построения. Вопрос 4: Начертите структурную схему фазового дальномера и поясните его работу. Принцип действия фазовых дальномеров поясняется структурной схемой на рис. 1. Предполагается, что излучается непрерывный немодулированный сигнал. Дальность до объекта наблюдения оценивается по разности фаз между излученным и принятым сигналами, которая измеряется фазометром Ф на несущей частоте. . Ухудшение разрешающей способности оконечным устройством зависит от его конкретного построения. Вопрос 4: Начертите структурную схему фазового дальномера и поясните его работу. Принцип действия фазовых дальномеров поясняется структурной схемой на рис. 1. Предполагается, что излучается непрерывный немодулированный сигнал. Дальность до объекта наблюдения оценивается по разности фаз между излученным и принятым сигналами, которая измеряется фазометром Ф на несущей частоте.  Рис. 1 - Простейшая схема фазового дальномера. Пусть Рис. 1 - Простейшая схема фазового дальномера. Пусть  . Тогда измеряемая разность фаз . Тогда измеряемая разность фаз  , где , где  - фазовый сдвиг сигнала в приемнике, - фазовый сдвиг сигнала в приемнике,  - изменение фазы сигнала при отражении (либо переизлучении). Отсюда - изменение фазы сигнала при отражении (либо переизлучении). Отсюда  , следовательно , следовательно |  Для исключения из формулы неизвестных , производят измерение разности фаз на известной дальности. Пусть дальности Для исключения из формулы неизвестных , производят измерение разности фаз на известной дальности. Пусть дальности  соответствует соответствует  , тогда для дальности R имеем: , тогда для дальности R имеем:  (1) Таким образом, в рассмотренном варианте метод позволяет измерять перемещение объекта наблюдения и, следовательно, его скорость, если известно, за какое время это перемещение произошло. Особенность метода - высокая точность измерения. Действительно, предположение, что разность фаз φ измеряется со среднеквадратической погрешностью (1) Таким образом, в рассмотренном варианте метод позволяет измерять перемещение объекта наблюдения и, следовательно, его скорость, если известно, за какое время это перемещение произошло. Особенность метода - высокая точность измерения. Действительно, предположение, что разность фаз φ измеряется со среднеквадратической погрешностью  . Тогда из формулы (1) следует, что . Тогда из формулы (1) следует, что  . Увеличивая частоту . Увеличивая частоту  при фиксированной среднеквадратической фазовой погрешности , имеем возможность сколько угодно уменьшать при фиксированной среднеквадратической фазовой погрешности , имеем возможность сколько угодно уменьшать  . Однако, неограниченному увеличению частоты препятствует возникновение неоднозначности фазовых измерений . Однако, неограниченному увеличению частоты препятствует возникновение неоднозначности фазовых измерений  . К достоинствам метода относится и отсутствие мертвой зоны. Принципиальный недостаток схемы, представленной на рис. 1, заключается в невозможности развязать приемную и передающую антенны, поскольку прием и передача выполняются непрерывно на одной и той же частоте. На входе приемной антенны имеется суммарное гармоническое колебание, фаза которого существенно отличается от фазы полезного сигнала Поэтому фазовые дальномеры по схеме рис. 1 не реализуются. Развязку приемного и передающего трактов можно обеспечить двумя способами: 1. использовать доплеровский сдвиг сигналов, отраженных (переизлученных) от движущихся объектов, применить активный ответ на другой частоте. При этом надо учитывать, что разность фаз между сигналами разных частот непрерывно изменяется и не может быть измерена Выход - . К достоинствам метода относится и отсутствие мертвой зоны. Принципиальный недостаток схемы, представленной на рис. 1, заключается в невозможности развязать приемную и передающую антенны, поскольку прием и передача выполняются непрерывно на одной и той же частоте. На входе приемной антенны имеется суммарное гармоническое колебание, фаза которого существенно отличается от фазы полезного сигнала Поэтому фазовые дальномеры по схеме рис. 1 не реализуются. Развязку приемного и передающего трактов можно обеспечить двумя способами: 1. использовать доплеровский сдвиг сигналов, отраженных (переизлученных) от движущихся объектов, применить активный ответ на другой частоте. При этом надо учитывать, что разность фаз между сигналами разных частот непрерывно изменяется и не может быть измерена Выход - |
2. применение в запросчике и ответчике несущих частот, относящихся как простые числа  Измерение фазового сдвига производится в запросчике на частоте Измерение фазового сдвига производится в запросчике на частоте  . Частота, на которой производятся фазовые измерения, называется масштабной. При этом не решается проблема неоднозначности, поскольку интервал однозначного измерения дальности оказывается равным . Частота, на которой производятся фазовые измерения, называется масштабной. При этом не решается проблема неоднозначности, поскольку интервал однозначного измерения дальности оказывается равным  , где , где  - длина волны, соответствующая частоте - длина волны, соответствующая частоте  . Для ее решения в схему включают грубый измеритель, который измеряет дальность с точностью до интервала однозначности точной системы. В другом варианте измерения производятся на частоте модуляции, прием и передача развязаны по несущей частоте. Рассмотрим структурную схему дальномера (рис. 2). Дальномер содержит точный и грубый измерители, работающие на частотах . Для ее решения в схему включают грубый измеритель, который измеряет дальность с точностью до интервала однозначности точной системы. В другом варианте измерения производятся на частоте модуляции, прием и передача развязаны по несущей частоте. Рассмотрим структурную схему дальномера (рис. 2). Дальномер содержит точный и грубый измерители, работающие на частотах  и и  , причем , причем  . На частоте производится точное измерение, на частоте - грубое, предназначенное для устранения неоднозначности. Гармонические колебания с частотами и генерируются в запросчике, поступают на фазометры . На частоте производится точное измерение, на частоте - грубое, предназначенное для устранения неоднозначности. Гармонические колебания с частотами и генерируются в запросчике, поступают на фазометры  и и  , а также модулируют излучаемый запросный сигнал на несущей частоте , а также модулируют излучаемый запросный сигнал на несущей частоте  . Ответ осуществляется на несущей частоте . Ответ осуществляется на несущей частоте  . С выхода приемника ответного сигнала колебания с частотами и выделяются фильтрами и поступают на фазометры и , где выполняются грубое и точное измерения дальности: . С выхода приемника ответного сигнала колебания с частотами и выделяются фильтрами и поступают на фазометры и , где выполняются грубое и точное измерения дальности:  Рис. 2 - Структурная схема фазового дальномера с измерением разностей фаз на частотах модуляции. Рис. 2 - Структурная схема фазового дальномера с измерением разностей фаз на частотах модуляции.   Грубое измерение однозначно (интервал однозначности больше пределов измерений). Для расчета точного значения дальности надо найти k - целое число периодов разности фаз, утраченное при измерении. Процесс отыскания называется устранением неоднозначности. Каждому значению k соответствует интервал однозначного измерения дальности, равный Грубое измерение однозначно (интервал однозначности больше пределов измерений). Для расчета точного значения дальности надо найти k - целое число периодов разности фаз, утраченное при измерении. Процесс отыскания называется устранением неоднозначности. Каждому значению k соответствует интервал однозначного измерения дальности, равный  , где , где  (рис. 3). (рис. 3). |  Рис. 3 - Отсчеты дальности по точному и грубому измерителям. Вопрос 5: Изложите принцип действия частотного дальномера. В частотных дальномерах, как и во всех активных системах, дальность до объекта наблюдения измеряется по задержке принятого сигнала относительно зондирующего. Зондирующий сигнал — непрерывный, с частотной модуляцией. Задержка измеряется по изменению частоты между моментами приема и передачи (рис. 5.23). Рис. 3 - Отсчеты дальности по точному и грубому измерителям. Вопрос 5: Изложите принцип действия частотного дальномера. В частотных дальномерах, как и во всех активных системах, дальность до объекта наблюдения измеряется по задержке принятого сигнала относительно зондирующего. Зондирующий сигнал — непрерывный, с частотной модуляцией. Задержка измеряется по изменению частоты между моментами приема и передачи (рис. 5.23).  Рис. 5.23. Пояснения к принципу действия частотного дальномера Для нахождения связи между изменением частоты Δ f и задержкой Δ t положим, что на интервале задержки частота изменяется линейно— Рис. 5.23. Пояснения к принципу действия частотного дальномера Для нахождения связи между изменением частоты Δ f и задержкой Δ t положим, что на интервале задержки частота изменяется линейно—  Рис. 5.24. Структурная схема частотного дальномера Закон изменения частоты излучаемых колебаний может быть различным, в частности, гармоническим или пилообразным. Изменение частоты должно быть знакопеременным, так как частота — ограниченный природный ресурс. Вопрос 6: Перечислите известные Вам методы обзора пространства в радиолокации и поясните их сущность. Важнейшей тактической характеристикой РЛС является область обзора - область пространства в которой выполняются предъявляемы к РЛС ТТТ. Область обзора характеризуется следующими параметрами: Рис. 5.24. Структурная схема частотного дальномера Закон изменения частоты излучаемых колебаний может быть различным, в частности, гармоническим или пилообразным. Изменение частоты должно быть знакопеременным, так как частота — ограниченный природный ресурс. Вопрос 6: Перечислите известные Вам методы обзора пространства в радиолокации и поясните их сущность. Важнейшей тактической характеристикой РЛС является область обзора - область пространства в которой выполняются предъявляемы к РЛС ТТТ. Область обзора характеризуется следующими параметрами:
Методы обзора пространства делятся на две группы: 1. Обзор по жесткой программе – скорость перемещения А (сканирование) не зависит от радиотехнической обстановки; 2. Обзор по гибкой программе или адаптивный обзор – скорость сканирования зависит от радиотехнической обстановки. Реализация возможна если в составе РЛС присутствует ЭВМ, позволяющая быстро оценивать радиотехническую обстановку, а антенная система представляет собой фазированную решетку. Виды обзора по жесткой программе: 1. Последовательный обзор – локатор имеет антенну с одним лучом, и последовательно просматривает область обзора (круговой, спиральный, строчный и др.) 2. Параллельный обзор – два и более луча одновременно сканируют всю область обзора. 3. Параллельно-последовательный обзор – два и более луча последовательно просматривают всю область обзора. Общее время последовательно обзора:
Oобз – телесный угол обзора пространства, Оа – телесный угол диаграммы направленности антенны. В большинстве случаев скорость сканирования непостоянна вследсвии реверса антенны. Это учитывается |
введением в формулу коэфф. Обзора kОБЗ≥1:
Секторный обзор пространства: Винтовой обзор пространства:
Спиральный обзор пространства:
|