 2014-05-17
2014-05-17 4523
4523Прямая напорная лопата с выдвижной рукоятью (рис. 9.1) состоит из ковша 1, рукояти 2, удерживаемой седловым подшипником 3 и деталями напорного механизма. Стрела опирается на поворотную платформу с помощью пятового шарнира 4 и поддерживается с помощью подвески 5. Подъемный канат от лебедки О 1 проходит через головной блок 6 стрелы и в точке В с подвеской 7 ковша образует подвижное звено.
В зависимости от системы напорного механизма и конструкции стрелы различают пять основных типов прямой лопаты:
• с зубчато-реечным механизмом напора (рис. 4.1, а), расположенным на стреле 8, и передающим усилие на зубчатую рейку 9 рукояти через кремальерную шестерню 10 с осью вращения О 2 и через точки контакта ползунов седлового подшипника с рукоятью (точка А);
• с канатным механизмом напора (рис. 4.1, б) и стрелой, которую шарнир О 2 делит на две части – верхнюю 8 и нижнюю 9, поддерживаемую подкосом 10. Напорная лебедка 11 располагается на платформе. Выдвижение и возврат рукояти производятся канатами 12 и 13, которые огибают центральные блоки 14, закрепленные на оси О 2 и полублоки 15 и 16, закрепленные на рукояти;
• с канатным механизмом напора (рис. 4.1, в) и неразрезной стрелой 8. Седловой подшипник 3 и центральные блоки 14 укрепляются на оси О 2 в стреле. Выдвижение и возврат рукояти осуществляются лебедкой 11 так же, как и на схеме, показанной на рис. 9.1, б;
• с канатным механизмом напора (рис. 4.1, г) и неразрезной двухбалочной стрелой 8. Седловой подшипник 3 установлен в шарнире стойки 9, не связанной со стрелой. Стойка поддерживается подкосом 10. Напорная лебедка 11 расположена в передней части платформы. Выдвижение и возврат рукояти осуществляются так же, как на схеме, показанной на рис. 4.1, б.
• с гидравлическим механизмом напора и неразрезной двухбалочной стрелой 1. Наружный рукав 2 присоединен к седловому подшипнику, а последний осью 3 к стреле. Поршень и шток 4 гидроцилиндра находящиеся внутри круглой балки рукояти 5 и соединенные с ней, осуществляют выдвижение и возврат рукояти, скользящей по направляющим седлового подшипника, на необходимую длину хода при подаче жидкости от насосной станции расположенной на платформе.
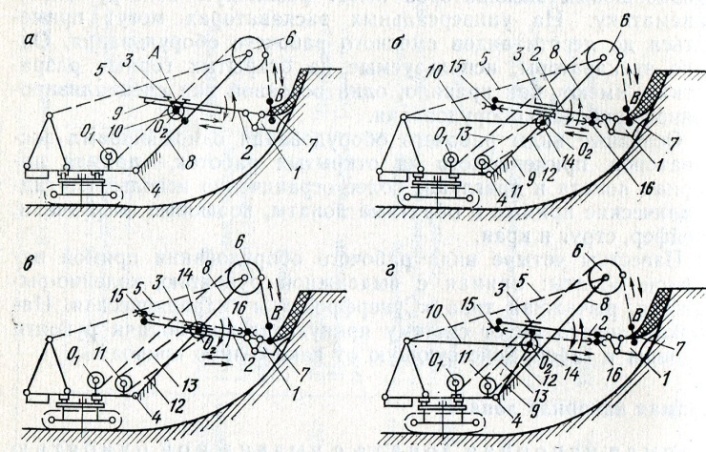
Рис. 4.1. Конструктивные схемы прямой напорной лопаты с выдвижной рукоятью
Положение рукояти в седловом подшипнике позволяет ей вращаться вокруг оси О 2крепления седлового подшипника под действием усилия в подъемном канате, а также поступательно перемещаться в седловом подшипнике, в результате действиянапорного механизма, и проворачиваться вокруг продольной оси. Таким образом, у трех последних типов напора рукоять имеет три степени подвижности. Рабочие движения ковша во времени определяются сложением векторов перемещений, обеспечиваемых подъемным и напорным механизмами при вращательном движении барабанов лебедок напора и подъема.
Разгрузка ковша после поворота платформы к отвалу или на ось транспортного средства осуществляется открытием днища специальным механизмом. Ковш опускается в исходное положение для копания у подошвы уступа под действием веса рукояти и ковша. При этом днище ковша захлопывается. Ковш готов к наполнению.
Напорные прямые лопаты предназначены для разработки массивов, расположенных, как правило, выше уровня установки машины. Они способны осуществлять черпание ниже уровня установки, на незначительную глубину, достаточную только для самозаглубления машины при проходке траншей.
Прямая коленно-рычажная напорная лопата (рис. 4.2) имеет рукоять, кинематически не связанную со стрелой и перемещающуюся между стойками двухбалочной неразрезной стрелы. Такого рода лопаты известны с двумя системами подачи: зубчато-реечной (рис. 4.2, а) и канатной (рис. 4.2, б).
Элементами рабочего оборудования лопаты являются ковш 1, рукоять 2, стрела 3 с головными блоками 4 и пятой 5, балансир 6, подвеска ковша 7, стреловой полиспаст 8, подъемный канат 9.
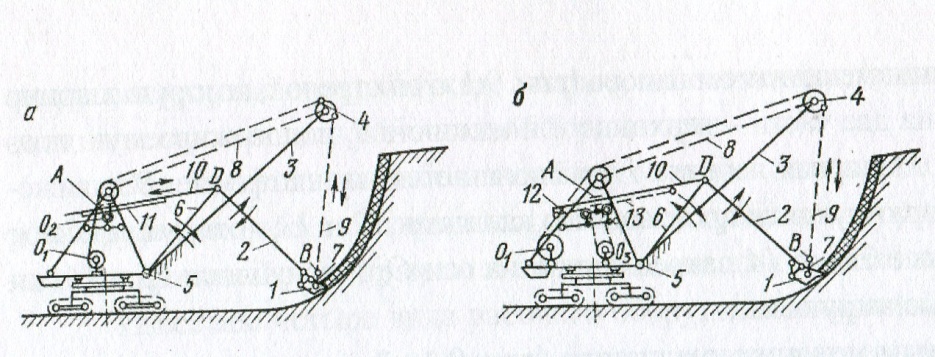
Рис. 4.2. Конструктивные схемы коленно-рычажных прямых лопат
У коленно-рычажных лопат седловой подшипник А вынесен на двуногую стойку, а подача рукояти на забой осуществляется напорной балкой 10, перемещаемой посредством либо зубчато-реечной системы 11 (рис. 4.2, а), либо системы канатов 12 и 13 (рис. 4.2, б).
В кинематическом отношении неподвижным звеном исполнительного механизма экскаватора является поворотная платформа с двуногой стойкой и стрелой. Напорный механизм передает напорно-возвратное движение балке 10, шарнирно соединенной с балансиром 6. Рукоять и ковш образуют вращательные пары в шарнире D и в точке В. Ковш подвешивается к подъемному канату 9 через подвеску ковша 7. Коленно-рычажный механизм воспроизводит движение прямой лопаты в результате вращательного движения кремальерной шестерни вокруг оси О 2, а также барабанов лебедок относительно точек О 1 и О 3. Траектории копания определяются в результате сочетания поворотного, относительно точки D, и поступательного, относительно седлового подшипника А, движений напорной балки 10 рукояти.
Разгрузка ковша осуществляется так же, как и у прямой напорной лопаты с выдвижной рукоятью – открытием днища. Коленно-рычажные системы применялись на мощных вскрышных лопатах производства компаний “Bucyrus” и “Marion” (США) и на вскрышной лопате ЭВГ 35/65 НКМЗ (Украина). На карьерных лопатах данная система не нашла применения ввиду низкой ее кинематической эффективности.
Прямая напорная лопата с рабочим оборудованием «Суперфронт» (рис. 4.3) имеет стрелу 22, на которой установлен нижний блок 2 канатного привода подъема рамы 6, образующий с верхним блоком 3, через уравнительный блок 5 полиспастную систему. Два напорных гидравлических цилиндра 16 при выдвижении перемещают штангу 17 и мачту 20 относительно оси О 1.
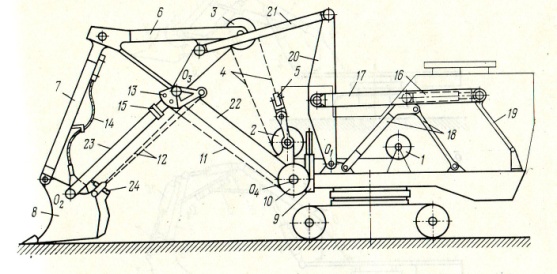
Рис. 4.3. Конструктивная схема прямой лопаты типа «Суперфронт»:
1 – подъемная лебедка; 2 и 3 – нижний и верхний блоки механизма подъема; 4 – подъемный канат; 5 – уравнительный блок; 6 – подъемная рама; 7 – подъемное звено; 8 – ковш; 9 – гидрофиксатор; 10 – блок; 11, 12 – канаты поворота ковша; 13 – профильный полублок; 14 – канат фиксации положения ковша; 15 – база рукояти; 16 – гидроцилиндры напора; 17 – штанга; 18 – двуногая стойка; 19 – поддерживающее звено; 20 – мачта; 21 – напорное звено; 22 – стрела; 23 – рукоять; 24 – пневмоцилиндр открывания ковша
Мачта напорным звеном 21 передает усилие на раму 6. Гидрозамок 9 через канат 11, профильный полублок 13 и канат 12 удерживает ковш 8 от поворота по часовой стрелке вокруг оси О 1, укрепленной на рукояти 23 ковша. Возврат ковша в исходное положение осуществляется под действием сопротивления копанию или поворотом рамы 6 относительно оси О 3 механизмом подъема или напора. Последние передают усилия через звено 7, а ковш поворачивается относительно оси О 2 до полного выбирания слабины каната 14. Стрела 22 может подниматься и опускаться, поворачиваясь вокруг шарнира О 4, за счет перемещения мачты 20. При разгрузке ковша его днище открывается с помощью пневмоцилиндров 24, установленных на задней стенке ковша.
Траектория рабочего движения образуется при сложном взаимодействии трех механизмов: подъема, напора и поворота ковша.








