2015-01-21
2015-01-21 1594
1594Один из методов синтеза основан на использовании интегральной оценки ИВМО (интеграл от взвешенного модуля ошибки):
 (3.7)
(3.7)
где  - переходная составляющая ошибки.
- переходная составляющая ошибки.
Данный метод позволяет по известной передаточной функции объекта  рассчитать параметры ПИД-регулятора
рассчитать параметры ПИД-регулятора  , а также передаточную функцию предшествующего фильтра
, а также передаточную функцию предшествующего фильтра  .
.
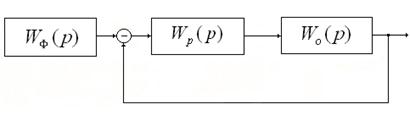
Рис.3.1. Структурная схема системы, настроенной по оценке ИВМО.
Передаточная функция данной системы
 . (3.8)
. (3.8)
Первоначально считаем  ,
,  .
.

Процедура синтеза включает следующие этапы:
- Рассчитать передаточную функцию замкнутой системы с ПИД-регулятором. (Для ПИД-регулятора передаточная функция будет иметь вид:
 ):
):
 (3.9)
(3.9)
- Используя таблицу оптимальных значений коэффициентов характеристического полинома замкнутой системы (табл.3.1), определить
 и коэффициенты ПИД-регулятора. Значение при этом может быть выбрано, или оно получается по расчетам, при приравнивании характеристического полинома системы с регулятором и табличного полинома.
и коэффициенты ПИД-регулятора. Значение при этом может быть выбрано, или оно получается по расчетам, при приравнивании характеристического полинома системы с регулятором и табличного полинома. - Определить передаточную функцию предшествующего фильтра, так, чтобы передаточная функция замкнутой системы не имела нулей и приняла табличный вид
 . (3.10)
. (3.10)
Для этого приравниваем передаточную функцию системы с регулятором и фильтром (4.8) и табличную передаточную функцию (4.10). Получаем ПФ предшествующего фильтра:
 , (3.11)
, (3.11)
где  - нули передаточной функции
- нули передаточной функции  .
.
Таблица 3.1. Коэффициенты характеристического полинома замкнутой системы, оптимальные по критерию ИВМО.