2015-02-04
2015-02-04 593
593Лекция 9
Синтез зубчастих зачеплень. Основна теорема зачеплення та її наслідок. Евольвентне зачеплення циліндричних зубчастих коліс. Евольвента кола, її властивості та рівняння. Задоволення евольвентних профілів зубців наслідку з основної теореми зачеплення. Зачеплення зубчастого колеса з робочою зубчастою рейкою.
Мы начинаем знакомиться с элементами синтеза механизмов. Начнем наше знакомство с механизмов с высшей КП – зубчатых механизмов.
Достоинство механизмов с высшей КП:
1. малые габариты и вес;
2. возможность точного воспроизведения закона движения выходного звена (по сравнению с рычажными механизмами зубчатые передачи имеют меньше зазоров);
3. высокий КПД (0,85 – зубчатая передача, 0,99 – планетарный механизм).
Недостатки:
наличие высшей КП может привести к повышенным удельным давлениям в точке контакта. Это в свою очередь может привести к выкрашиванию материалов (питтинг).
Рассмотрим основы теории зацепления.
Условие существования высшей КП.
Для того чтобы не было отрыва или внедрения поверхностей звеньев, образующих высшую КП, необходимо, чтобы проекции линейных скоростей взаимодействующих тел на общую нормаль, проведенную в точке контакта тел, были равны.
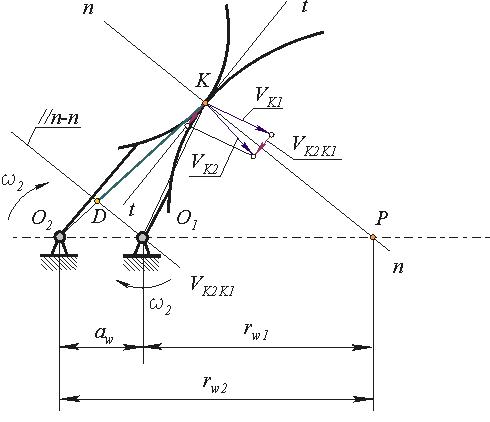
Рассмотрим два тела 1 и 2, совершающих вращательное движение соответственно вокруг центров 01 и 02 с угловыми скоростями w 1 и w 2.
Основная теорема зацепления(сформулирована Виллисом в 1841 году)
Передаточное отношение между звеньями совершающими вращательное движение прямо пропорционально отношению угловых скоростей и обратно пропорционально отношению расстояний от центров вращения до полюса.
Формулировка анализа. Нормаль в точке соприкосновения элементов высшей пары качения и скольжения делит линию центров на части, обратно пропорциональные угловым скоростям.
Формулировка синтеза. Профили в высшей кинематической паре должны быть выполнены так, чтобы контактная нормаль к ним проходила через полюс относительного вращения звеньев.
Рис. 4.1


 из условия существования высшей кинематической пары
из условия существования высшей кинематической пары
Скорость любой точки звена 2 в относительном движении будет равно его угловой скорости в этом движении умноженной на расстояние от этой точки до полюса относительного вращения, т. е.

Для нахождения МЦС к относительным линейным скоростям VO2O1 и Vck восстанавливают перпендикуляры, на пересечении которых получают точку Р. – МЦС в относительном движении.
Точка Р. – полюс зацепления, т.е. мгновенный центр вращения в относительном движении двух звеньев.
Если зацепляющиеся тела имеют наружные зубья, то полюс Р. расположен между осями О1 и О2, т.е. зацепление наружное(см. рис. 4.2)
Если хотя бы одно из колес имеет внутренние зубья, то полюс Р расположен за линией О1О2, т.е. зацеплении внутреннее