2015-02-27
2015-02-27 1770
1770Для сериесных двигателей возможны два тормозных режима, торможение противовключением и динамическое торможение (рис.3.5). Торможение с отдачей энергии в сеть для двигателя осуществить невозможно, так как его ЭДС не может быть больше напряжения сети.
Тормозные режимы сериесного двигателя имеют те же закономерности, что и для шунтового двигателя. Необходимо отметить только особенности. Для режима противовключения имеется возможность изменять полярность не только якоря, но и обмотки возбуждения, что обусловлено малым числом витков обмотки возбуждения. Для варианта самовозбуждения динамического торможения во избежание размагничивания магнитной цепи (токи направлены в обмотках на встречу друг к другу) необходимо изменить полярность якоря или обмотки возбуждения.
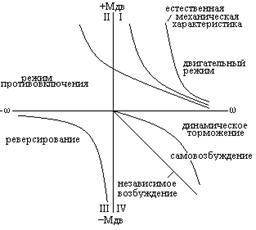
Рис. 3.5. Механические характеристики сериесного двигателя постоянного тока в тормозных режимах
3.2. Механические характеристики асинхронного электродвигателя переменного тока и их построение
3.2.1. Двигательный режим
Схема включении асинхронного двигателя переменного тока в двигательном режиме представлена на рис. 3.6.
Скольжение асинхронного двигателя S - мера того, насколько ротор в своем вращении отстает от вращающегося магнитного поля статора
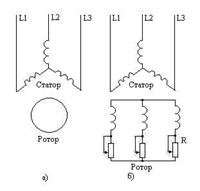
Рис. 3.6. Схема включения асинхронного двигателя в двигательном режиме: а – асинхронного, б – с фазным ротором
 , (3.10)
, (3.10)
где n 0, w 0 – соответственно, скорость вращения и угловая скорость вращающегося магнитного поля или синхронная скорость вращения;
n, ω – соответственно, скорость вращения и угловая скорость ротора;
f – частота тока питающей сети;
Р – число пар полюсов.
Скольжение S, благодаря которому индуктируется ЭДС Е 2 и возникает ток I 2 в замкнутых обмотках ротора, для двигательного режима изменяется от 1 (ротор неподвижен в первый момент или заторможен) до 0, когда вращается синхронно с магнитным полем. Практически, даже на холостом ходу скорость вращения ротора хотя немного (до 1%), но меньше синхронной.
Вращающий момент асинхронного двигателя, как и любой электрической машины, пропорционален магнитному потоку Ф и активной составляющей тока ротора I 2, то есть
М дв = к I 2Фcos j 2, (3.11)
где к – конструктивная постоянная асинхронного двигателя;
j 2 – угол сдвига между ЭДС ротора Е 2 и током ротора I 2.
Для вывода уравнения механической характеристики асинхронного двигателя необходимо воспользоваться упрощенной схемой замещения, даваемой на электротехнике, из которой
 , (3.12)
, (3.12)
где Е 2 к = Uф – соответственно, фазные ЭДС неподвижного ротора и номинальное напряжение сети;
r 2 – омическое сопротивление обмоток или стержней ротора;
х 2 – индуктивное сопротивление обмоток заторможенного ротора (х 2 = 2 πf L, L – индуктивность обмоток ротора).
Тогда с учетом развернутых значений I2 и соs φ 2 (3.12) вращающий момент асинхронного двигателя (3.11)
 , (3.13)
, (3.13)
Точный анализ выражения М дв = f (S, r 2, х 2) путем приравнивания d м/ d s =0, показывает, что при скольжении, называемом критическим S = S к = r 2/ х 2, двигатель развивает максимальный или критический момент М к. Механическая характеристика асинхронного двигателя приведена на рис. 3.7. и имеет характерные точки:
(·)1 М дв = М п – начальный пусковой момент, S =1, ω =0;
(·)2 М дв = М к – максимальный или критический момент, S = S к, ω = ω к;
(·)3 М дв = М н – номинальный момент S = S н, ω = ω н;
(·)4 М дв = 0, S = 0, ω = ω 0.
Введение добавочных сопротивлений r 1, r 2 в цепь ротора (возможно только для двигателя с фазным ротором), при постоянстве других параметров двигателя и питающей сети, позволяет получать реостатные или искусственные механические характеристики (рис 3.8.), а при изменении напряжения питающей сети U и постоянстве остальных параметров сети, искусственные механические характеристики представленные на рис. 3.9.
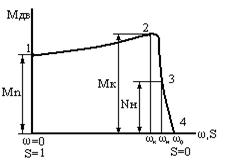
Рис. 3.7. Механическая характеристика асинхронного двигателя в двигательном режиме
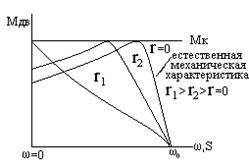
Рис. 3.8. Механические характеристики асинхронного двигателя при изменении сопротивления роторной цепи
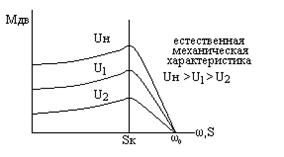
Рис. 3.9. Механические характеристики асинхронного двигателя при изменении напряжения питающей сети
Асинхронный двигатель имеет вполне определенное значение пускового Мп и максимального Мк моментов, а так же пускового тока:
– кратность начального пускового момента  ;
;
– перегрузочная способность  ;
;
– кратность пускового тока 
Величины m п, m к К в обязательном порядке задаются в каталогах на данный двигатель.
Так как на практике пользоваться выражением М дв = f (r 2, х 2, S) не всегда удобно, то оно с учетом схемы замещения и некоторых преобразований приобретает зависимость М дв = f (S) и имеет вид:
– уточненное выражение механической характеристики
 , (3.14)
, (3.14)
где  – коэффициент, величина постоянная (r' 2 – приведенное активное сопротивление ротора).
– коэффициент, величина постоянная (r' 2 – приведенное активное сопротивление ротора).
Величины S к; a – механической характеристики (3.14) через каталожные данные двигателя определяется ( )
)
 , (3.15)
, (3.15)
 , (3.16)
, (3.16)
Если в формуле 3.14 пернебречь активным сопротивлением статора (мощные двигатели), то получим формулу механической характеристики, более удобную для расчетов, так называемое упрощенное выражение
 , (3.17)
, (3.17)
где  – величина критического скольжения.
– величина критического скольжения.
Механические характеристики по упрощенной и уточненной формулам представлены на рис. 3.10
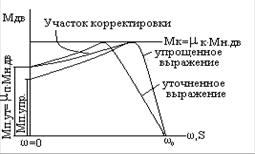
Рис. 3.10. Механические характеристики асинхронного двигателя построенные по упрощенной и уточненной формулам